一种柱体定心机械臂抓手的制作方法
1.本实用新型涉及机械臂抓手,具体涉及一种柱体定心机械臂抓手。
背景技术:
2.抓手作为工业机器人末端执行器,有着十分广泛的应用。针对不同的抓取工件、抓手的种类、形式均有不同。针对柱形工件,抓手为气动手指,但气动手指夹持力有限、夹持行程较小,难以满足大重量、大尺寸柱形工件的夹紧。
技术实现要素:
3.为解决现有技术存在的不足,本实用新型提供了一种柱体定心机械臂抓手,满足机械臂对大型柱形零部件的夹紧需求。
4.本实用新型的技术方案为:
5.本实用新型提供了一种柱体定心机械臂抓手,包括抓手本体,还包括设置在所述抓手本体上的导向转盘、伸缩气缸和与所述抓手本体连接的固定法兰;所述伸缩气缸的活塞杆与所述导向转盘连接,所述伸缩气缸的端盖与所述固定法兰连接;所述伸缩气缸的伸缩运动驱动所述导向转盘转动;所述导向转盘转动带动所述抓手本体做夹紧和松开动作。
6.进一步的,所述导向转盘开设有若干个导向槽,所述抓手本体的一端与所述导向槽活动连接、且可在所述导向槽内移动。
7.进一步的,所述导向槽数量为三个,沿所述导向转盘的圆周方向均布排布,三个导向槽的排布方式同风扇叶片排布方式。
8.进一步的,所述抓手本体包括设置在底部的若干个夹持部、与所述夹持部顶部固定连接的滑轨组件,与所述滑轨组件固定连接的多向导轨件;所述夹持部可通过滑轨组件在多向导轨件上移动。
9.进一步的,所述夹持部包括夹杆和所述夹杆垂直的底脚。
10.进一步的,所述抓手本体还包括若干个压紧气缸,所述压紧气缸的端盖与所述多向导轨件固接,若干个压紧气缸的活塞杆同时固接有一压紧件;所述压紧件随所述压紧气缸的活塞杆运动而移动。
11.进一步的,所述柱体定心机械臂抓手还包括工业相机,设置在所述固定法兰上。
12.进一步的,抓手本体还包括力矩传感器,所述力矩传感器设置在所述固定法兰上。
13.进一步的,所述柱体定心机械臂抓手还包括浮动尾座,所述浮动尾座设置在所述伸缩气缸的端盖与所述固定法兰之间。
14.进一步的,所述导向槽、所述夹持部和所述压紧气缸的数量相同。
15.本实用新型所达到的有益效果为:
16.本实用新型实施例采用在抓手本体上设置导向转盘和伸缩气缸,伸缩气缸驱动导向转盘,从而带动夹持部对工件做夹紧和松开动作的技术方案,该方案结构简单,增大了夹持力和夹持行程,具备较好的定心作用,能够解决现有技术中对大型柱形零部件夹紧效果
不好的问题。
附图说明
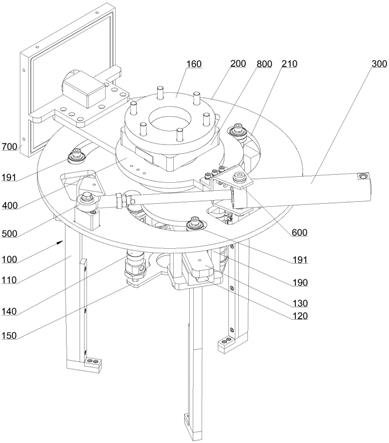
17.图1是本实用新型一实施例的整体结构示意图。
18.图2是本实用新型一实施例的另一视角的整体结构示意图(省略工业相机)。
19.图3是本实用新型一实施例的导向转盘的结构示意图。
20.图4是本实用新型一实施例的结构剖视示意图。
21.图5是本实用新型一实施例的柱体定心机械臂抓手夹紧状态下的结构示意图。
22.图中,100、抓手本体;110、夹持部;120、滑轨组件;121、滑轨;122、滑块;130、多向导轨件;140、压紧气缸;150、压紧件;160、连接法兰;170、连接台柱;180、转动轴承;190、连接件;191、导向轴承;200、导向转盘;210、导向槽;300、伸缩气缸;400、固定法兰;500、鱼眼接头;600、浮动尾座;700、工业相机;800、力矩传感器。
具体实施方式
23.为便于本领域的技术人员理解本实用新型,下面结合附图说明本实用新型的具体实施方式。
24.在本技术的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
25.需要说明的是,当组件被称为“装设于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。当一个组件被认为是“固定于”另一个组件,它可以是直接固定在另一个组件上或者可能同时存在居中组件。
26.需要说明的是,在本实施例中,柱体定心机械臂抓手的夹持部110的数量选用三个为例来描述,当然选用其他数量也可以,本技术的保护范围并不局限于此。
27.如图1~2所示,本实用新型提供了一种柱体定心机械臂抓手,包括抓手本体100、设置在抓手本体100上的导向转盘200、伸缩气缸300和与抓手本体100连接的固定法兰400。伸缩气缸300的活塞杆与导向转盘200连接,伸缩气缸300的端盖与固定法兰400连接。伸缩气缸300的伸缩运动驱动导向转盘200转动,导向转盘200转动带动抓手本体100做夹紧和松开动作。该柱体定心机械臂抓手增大了夹持力和夹持行程,具备较好的定心作用,能够解决现有技术对大型柱形零部件夹紧效果不好的问题。
28.伸缩气缸300的活塞杆固定连接有一鱼眼接头500,鱼眼接头500还和一支撑块通过螺钉连接,支撑块固定在导向转盘200上。伸缩气缸300的端盖与浮动尾座600的一端铰接,浮动尾座600的另一端通过螺钉与固定法兰400连接。
29.导向转盘200开设有若干个导向槽210,抓手本体100的一端与导向槽210活动连接。
30.如图3所示,该实施例中,为了限定抓手本体100的活动轨迹,导向转盘200沿圆周
方向均布的开设有导向槽210,数量为三个,三个导向槽210的排布同风扇叶片排布方式。具体的,导向槽210的结构可以为圆弧条状,圆弧条状的弧长是根据选用的伸缩气缸300的行程来确定的。
31.如图4所示,抓手本体100包括连接台柱170,导向转盘200套在连接台柱170外、且可相对于连接台柱170转动,在连接台柱170和导向转盘200之间设置有转动轴承180,具体的,转动轴承180可以选用背靠背角接触球轴承。连接台柱170上端通过螺栓与固定法兰400连接,连接台柱170的下端通过螺栓与多向导轨件130固定。
32.抓手本体100还包括设置在底部的若干个夹持部110、与夹持部110顶部固定连接的滑轨组件120,与滑轨组件120固定连接的多向导轨件130。夹持部110可通过滑轨组件120在多向导轨件130上移动。夹持部110的数量和滑轨组件120的数量相同。
33.在该实施例中,夹持部110的数量为三个,等间距圆周分布,夹持部110的上部通过一连接件190与导向转盘200连接,具体的,连接件190上设置有导向轴承191,导向轴承191置于导向槽210内,并可在导向槽210内移动。
34.在该实施例中,滑轨组件120包括配合使用的滑块122和滑轨121。夹持部110的上部与滑块122固定,滑轨121与多向导轨件130固定。
35.三个夹持部110同时夹紧或松开,具备较好的定心作用。
36.具体的,夹持部110包括夹杆和与夹杆垂直、且位于夹杆底部的底脚,该结构夹紧柱形工件时,可以防止工件滑落。三个夹持部110安装排布时,需将底脚的方向调整为底脚之间为相对的方向。
37.为了更好的压紧柱形工件,防止窜动,抓手本体100还包括若干个压紧气缸140,压紧气缸140的端盖通过刚性结构件与多向导轨件130固接,刚性结构件的结构可以是截面为z形的结构,若干个压紧气缸140的活塞杆同时固接有一压紧件150。压紧件150随压紧气缸140的活塞杆运动而移动。压紧件150结构可以为板状结构。
38.在该实施例中,压紧气缸140的数量为三个,等间距圆周分布,压紧气缸140通过螺栓固定连接在多向导轨件130上,三个压紧气缸140的活塞杆同时固接有一压紧件150,连接方式可以是螺钉连接。
39.抓手本体100还包括力矩传感器800,所述力矩传感器800通过螺栓连接在固定法兰400上。力矩传感器800有防碰撞的作用,在碰撞产生力矩变化时,为机械臂发信号停止动作,防止设备刚性损坏。力矩传感器800上部还通过螺栓固定有连接法兰160,连接法兰160用于与连接机械臂上的其他部件。
40.柱体定心机械臂抓手还包括工业相机700,设置在所述固定法兰400上。工业相机700具有识别工件位置的作用,可通过拍照获取工件位置,并传送给机械臂控制系统,便于机械臂抓手寻找位置进行夹紧。
41.导向槽210、夹持部110和压紧气缸140的数量相同。
42.如图5所示,柱体定心机械臂抓手夹紧状态下,伸缩气缸300的活塞杆缩回,伸缩气缸300驱动导向转盘200转动,导向转盘200带动夹紧部向导向转盘200的圆心处靠拢夹紧工件,压紧件150由压紧气缸140驱动向下运动,压紧工件。
43.工作过程:
44.柱体定心机械臂抓手由伸缩气缸300驱动,伸缩气缸300端盖连接浮动尾座600,浮
动尾座600连接于固定法兰400上,伸缩气缸300的活塞杆通过鱼眼接头500与导向转盘200连接,导向转盘200在伸缩气缸300驱动下转动,导向转盘200上开用于固定轨迹的导向槽210,连接件190的上端的导向轴承191内置与导向槽210中,连接件190与夹持部110连接,导向转盘200转动驱动导向轴承191沿导向槽210移动。连接件190与夹持部110连接,滑块122固定于夹持部110上,滑轨121固定于多向导轨件130上,连接件190驱动夹持部110移动,将导向转盘200的转动转化为夹持部110的直线移动,带动夹持部110夹紧或松开。三个夹杆同时夹紧或松开,具备定心作用。夹持部110底端带有底脚,可防止夹持时柱形工件滑落。三个压紧气缸140固定于多向导轨件130上,可将夹持柱形工件压紧于夹杆底脚上,防止柱形工件窜动。
45.以上所述的本实用新型实施方式,并不构成对本实用新型保护范围的限定。任何在本实用新型的精神和原则之内所作的修改、等同替换和改进等,均应包含在本实用新型的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1