一种基于电静液作动原理的混合驱动重载下肢外骨骼
1.本实用新型属于重载下肢助力外骨骼机器人技术领域,特别涉及一种基于电静液作动原理的混合驱动重载下肢外骨骼。
背景技术:
2.重载下肢助力外骨骼机器人主要对人体髋、膝、踝关节实施助力,用于增强穿戴者下肢出力,辅助其完成平常无法进行的工作。根据人体负重行走下肢生物力学研究:人体髋关节角度呈正弦曲线周期变化,行走周期内平均功率为正值,故需进行主动驱动;膝关节在行走过程角度变化最大,为实现爬斜坡、上楼梯等任务,需进行主动驱动;踝关节在快速或负重行走状态下,平均功率为正,可采用被动单元进行驱动。现有重载下肢助力外骨骼受限于机动性、可靠性、能源效率、功率密度等问题,一般难以遵循上述助力策略。
3.目前,下肢助力外骨骼机器人的关节驱动方式主要包括:液压驱动、电机驱动、气动驱动、被动储能单元等。其中,液压驱动输出力大、可靠性高,但存在漏油污染、体积大、难集成等缺点;电机驱动的机构相对简单、控制精度较高,然而负重外骨骼的大输出转矩需求导致电机尺寸较大,续航有限;气动驱动的单位体积出力多、成本较低,不过噪声大、控制调试难度大;被动储能单元无需电源、控制器等、易于安装布置,但助力模式单一,无法根据外部负载主动变化。上述关节驱动方式各有利弊,现有下肢助力外骨骼很难实现“各取所长”。因此,一种符合人体负重行走步态规律、采用电静液作动原理并结合现有驱动方式的混合驱动重载下肢外骨骼仍是空白。
技术实现要素:
4.本实用新型提出一种基于电静液作动原理的混合驱动重载下肢外骨骼,包括腰部组件、髋关节组件、膝关节组件和踝关节组件;
5.所述腰部组件两侧各固定安装有所述髋关节组件;
6.两个所述髋关节组件下方各固定安装有所述膝关节组件;
7.两个所述膝关节组件下方各固定安装有所述踝关节组件;
8.所述膝关节组件包括电静液作动器、大腿杆件、大小腿连接件和小腿杆件;
9.所述电静液作动器上端面设有若干螺纹孔,与髋关节组件下端通过螺钉固定连接;
10.所述电静液作动器下端面与大腿杆件上端面通过螺钉固定连接;
11.所述电静液作动器设置有伸缩杆,所述电静液作动器能够驱动伸缩杆做往复直线运动;
12.所述伸缩杆末端安装有第一关节轴承,所述大腿杆件上端设置有预留孔,所述伸缩杆穿过预留孔,第一关节轴承与大小腿连接件第一端销轴连接;
13.所述大腿杆件下端与小腿杆件上端轴连接;
14.所述小腿杆件靠近上端设置有关节连接孔,大小腿连接件第二端设置有第二关节
轴承,所述小腿杆件通过连接孔与第二关节轴承销轴连接;
15.所述小腿杆件下方设置有踝连接孔,所述踝关节组件能够插入到踝连接孔中并紧固;
16.当所述电静液作动器驱动伸缩杆做往复直线运动时,能够通过大小腿连接件带动小腿杆件绕膝关节轴线旋转运动。
17.进一步地,所述髋关节组件包括行星电机、髋腰转接件、髋部输出转接件和大腿连接组件;
18.所述髋腰转接件第一端通过螺孔与腰部组件固定连接;
19.所述行星电机设置有外法兰,所述髋腰转接件第二端与所述行星电机外法兰固定连接;
20.所述行星电机输出端与髋部输出转接件上侧固定连接,所述行星电机能够带动所述髋部输出转接件绕髋关节轴线旋转运动;
21.所述髋部输出转接件下端与所述大腿连接组件上端轴连接,所述大腿连接组件能够沿轴转动;
22.所述大腿连接组件下部设置有竖直方向转轴,所述大腿连接组件下部能够沿其竖直轴线的自由旋转;
23.所述大腿连接组件下端面设置有若干螺纹孔,所述电静液作动器上端面配合设有若干螺纹孔,所述大腿连接组件与所述电静液作动器通过螺钉固定连接。
24.进一步地,所述行星电机输出端与髋部输出转接件配合设置有第一限位块,所述第一限位块能够限制所述髋部输出转接件绕髋关节轴线旋转运动角度;
25.所述髋部输出转接件下端与所述大腿连接组件上端配合设置有第二限位块,第二限位块能够限制所述大腿连接组件沿轴转动角度;
26.所述大腿连接组件下部设置有第三限位块,所述第三限位块能够限制所述大腿连接组件下部沿其竖直轴线旋转角度。
27.进一步地,所述的腰部组件包括髋部支撑件、腰板和托架;
28.所述腰板中部两侧对称设置有若干螺孔,所述髋部支撑件能够通过不同的螺孔对称安装在腰板两侧;
29.所述托架与所述腰板上端固定连接;
30.所述髋部支撑件远离腰板一侧设置有螺孔,髋部支撑件通过螺孔与所述髋腰转接件第一端固定连接。
31.进一步地,所述髋部支撑件远离腰板一侧设置有卡扣结构,所述卡扣结构能够连接腰部绑缚组件;所述腰部绑缚组件能够将腰部组件绑缚在腰上。
32.进一步地,所述腰板中部两侧对称设置有若干螺孔,所述髋部支撑件能够通过不同的螺孔对称安装在腰板两侧;
33.通过使用不同螺孔能够调节腰部组件宽度;
34.当使用靠近腰板中部的螺孔时,其腰部组件较窄;
35.当使用远离腰板中部的螺孔时,其腰部组件较宽。
36.进一步地,所述的踝关节组件包括小腿调节杆、踝部组件和足底组件;
37.所述小腿调节杆上端与小腿杆件下方踝连接孔配合,所述小腿调节杆上端能够插
入到小腿杆件下方踝连接孔中并紧固;
38.所述小腿调节杆下端与所述踝部组件轴连接,所述小腿调节杆能够绕其轴线自由旋转;
39.所述踝部组件中部设置有踝旋转组件,所述踝部组件能够沿踝旋转组件轴线自由旋转;
40.所述踝部组件下端与足底组件顶部固定连接。
41.进一步地,所述小腿调节杆上端能够插入到小腿杆件下方踝连接孔中,其插入深度能够调节。
42.进一步地,所述足底组件内部安装有压力传感器,所述压力传感器能够实时反馈足底压力。
43.进一步地,所述重载下肢外骨骼还包括电池组件,所述电池组件用于给电静液作动器和行星电机供电。
44.本实用新型所设计的重载下肢外骨骼,基于电静液作动原理与传统驱动方式相结合形成混合驱动,能量利用率高、惯性冲击小、功率密度大、机动灵活、结构轻质紧凑,可以应用于军事负重、消防救援等大负载背负行进场景。
附图说明
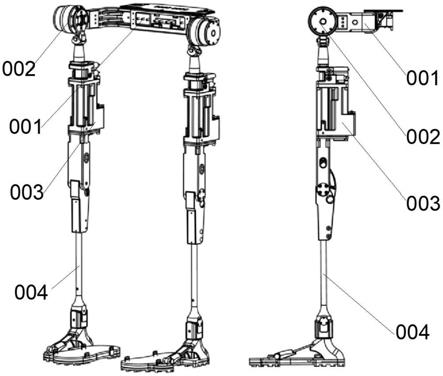
45.图1示出了本实用新型实施例的一种基于电静液作动原理的混合驱动重载下肢外骨骼前视图;
46.图2示出了本实用新型实施例的一种基于电静液作动原理的混合驱动重载下肢外骨骼后视图;
47.图3示出了本实用新型实施例的一种基于电静液作动原理的混合驱动重载下肢外骨骼立体图和侧视图;
48.图4示出了本实用新型实施例的一种基于电静液作动原理的混合驱动重载下肢外骨骼膝关节组件的立体图;
49.图5示出了本实用新型实施例的一种基于电静液作动原理的混合驱动重载下肢外骨骼腰部组件立体图;
50.图6示出了本实用新型实施例的一种基于电静液作动原理的混合驱动重载下肢外骨骼髋关节组件的立体图;
51.图7示出了本实用新型实施例的一种基于电静液作动原理的混合驱动重载下肢外骨骼踝关节组件的立体图;
52.图8示出了本实用新型实施例的一种基于电静液作动原理的混合驱动重载下肢外骨骼自由度示意图;
53.图9示出了本实用新型实施例的穿戴重载下肢外骨骼和不穿戴重载下肢外骨骼对比图。
54.图中:001、腰部组件;002、髋关节组件;003、膝关节组件;004、踝关节组件;110、髋部支撑件;120、腰板;130、托架;201、髋部屈伸度;202、髋部内收外展;203、髋部内旋外旋;210、行星电机;220、髋腰转接件;230、髋部输出转接件;231、第一限位块;240、大腿连接组件;241、第二限位块;301、膝关节屈伸度;310、电静液作动器;320、大腿杆件;330、大小腿连
接件;340、小腿杆件;401、踝屈伸度;402、踝内收外摆;410、小腿调节杆;420、踝部组件;430、足底组件。
具体实施方式
55.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
56.本实用新型提供了一种基于电静液作动原理的混合驱动重载下肢外骨骼,如图1、图2和图3所示。图1为重载下肢外骨骼前视图,图2为重载下肢外骨骼后视图,图3为重载下肢外骨骼立体图和侧视图。重载下肢外骨骼包括腰部组件001、髋关节组件002、膝关节组件003和踝关节组件004。所述腰部组件001两侧各固定安装有所述髋关节组件002;两个所述髋关节组件002下方各固定安装有所述膝关节组件003;两个所述膝关节组件003下方各固定安装有所述踝关节组件004。
57.本实用新型所设计的重载下肢外骨骼,其膝关节组件驱动使用是电静液作动器,其原理为电静液作动原理(electro
‑
hydrostatic actuator,eha)。eha采用“伺服电机+双向定量泵+液压作动器”的技术途径,其中,伺服电机+双向定量泵组成电静压的核心控制元件,简称“电机泵”,工作时,电机泵提供作动器的负载流量,通过调节转向、转速来改变系统流量的流向和大小,实现对作动器活塞杆伸缩和速度的控制。
58.所述膝关节组件003如图4所示,包括电静液作动器310、大腿杆件320、大小腿连接件330和小腿杆件340。所述电静液作动器310上端面设有若干螺纹孔,与髋关节组件002下端通过螺钉固定连接。所述电静液作动器310下端面与大腿杆件320上端面通过螺钉固定连接。所述电静液作动器310设置有伸缩杆,所述电静液作动器310能够驱动伸缩杆做往复直线运动;所述伸缩杆末端安装有第一关节轴承,所述大腿杆件320上端设置有预留孔,所述伸缩杆穿过预留孔,第一关节轴承与大小腿连接件330第一端销轴连接。大小腿连接件330为弧形结构。所述大腿杆件320下端与小腿杆件340上端轴连接;所述小腿杆件340靠近上端设置有关节连接孔,大小腿连接件330第二端设置有第二关节轴承,所述小腿杆件340通过关节连接孔与第二关节轴承销轴连接。当所述电静液作动器310驱动伸缩杆做往复直线运动时,如图4中右图所示,电静液作动器310带动大小腿连接件330运动,进而带动小腿杆件340绕膝关节轴线旋转运动。本实用新型所设计的重载下肢外骨骼,匹配穿戴者实际运动空间,不对穿戴者实际运动产生干涉,其膝关节组件003设置一个自由度,如图8所示,为膝关节屈伸度301。膝关节屈伸度301用于配合穿戴者完成屈膝动作。膝关节屈伸度301采用电静液作动器310驱动。所述小腿杆件340下方设置有踝连接孔,所述踝关节组件004能够插入到踝连接孔中并紧固。
59.本实用新型所设计的重载下肢外骨骼,膝关节为主动关节,满足人体负重行走下肢生物力学规律,膝关节组件采用电静液作动器驱动,充分利用电静液作动器功率密度大、惯性冲击小、结构轻质紧凑的优势。相对于电机直驱膝关节方案,在相同输出转矩的情况下,可以有效降低下肢转动惯量,减轻穿戴者负担,提高助力效率;相对于电机远端绳驱方案,其系统复杂程度低、集成度高,可以大幅提高外骨骼产品可靠性。与此同时,针对重载下
肢助力外骨骼实际使用中复杂多变的工况,本实用新型的方案利用液压阻尼可以在充足柔顺助力的同时,有效减少冲击、振动、碰撞对穿戴者和外骨骼造成的伤害和损坏。
60.本实用新型所设计的重载下肢外骨骼,膝关节组件003上部为髋关节组件002,如图6所示,包括行星电机210、髋腰转接件220、髋部输出转接件230和大腿连接组件240。所述髋腰转接件220第一端通过螺孔与腰部组件001固定连接;所述行星电机210设置有外法兰,所述髋腰转接件220第二端与所述行星电机210外法兰固定连接;所述行星电机210输出端与髋部输出转接件230上侧固定连接,所述行星电机210能够带动所述髋部输出转接件230绕髋关节轴线旋转运动。本实用新型所设计的重载下肢外骨骼,匹配穿戴者实际运动空间,其髋关节组件002设置三个自由度,如图8所示,此处为髋部屈伸度201。髋部屈伸度201用于配合穿戴者完成髋部(大腿)屈伸动作。髋部屈伸度201上采用行星电机串联直驱。
61.本实用新型所设计的重载下肢外骨骼,髋关节为主动关节,满足人体负重行走下肢生物力学规律。髋关节组件采用行星电机串联直驱的驱动方式。相对于被动关节而言,可以根据人体实际需求结合智能控制实时提供柔顺助力;相对于电机与减速器配合驱动的方案,行星电机直驱可以在相同输出转矩的情况下,大幅减小髋关节组件的体积和重量,提高结构集成度和紧凑性;相对于电机远端绳驱方案,在降低系统复杂程度的同时,可以大幅提高能源利用效率和系统可靠性。
62.所述髋部输出转接件230下端与所述大腿连接组件240上端轴连接,所述大腿连接组件240能够沿轴转动。本实用新型所设计的重载下肢外骨骼,匹配穿戴者实际运动空间,其髋关节组件002设置三个自由度,如图8所示,此处为髋部内收外展202。髋部内收外展202用于配合穿戴者完成大腿内收和外展动作。所述大腿连接组件240下部设置有竖直方向转轴,所述大腿连接组件240下部能够沿其竖直轴线的自由旋转。本实用新型所设计的重载下肢外骨骼,匹配穿戴者实际运动空间,其髋关节组件002设置三个自由度,如图8所示,此处为髋部内旋外旋203。髋部内旋外旋203用于配合穿戴者完成大腿内外旋转动作。所述大腿连接组件240下端面设置有若干螺纹孔,所述电静液作动器310上端面配合设有若干螺纹孔,所述大腿连接组件240与所述电静液作动器310通过螺钉固定连接。
63.如图6所示,所述行星电机210输出端与髋部输出转接件230配合设置有第一限位块231,通过第一限位块231自身结构,能够限制所述髋部输出转接件230绕髋关节轴线旋转运动角度,以满足穿戴者髋部(大腿)屈伸自由度
‑
髋部屈伸度201。所述髋部输出转接件230下端与所述大腿连接组件240上端配合设置有第二限位块241,通过第二限位块241自身结构,限制所述大腿连接组件240沿轴转动角度;以满足穿戴者大腿的内收/外展自由度
‑
髋部内收外展202。所述大腿连接组件240下部设置有第三限位块(图中未示出),第三限位块能够限制所述大腿连接组件240下部沿其竖直轴线旋转角度,以满足穿戴者大腿的内外旋转自由度
‑
髋部内旋外旋203。
64.本实用新型所设计的重载下肢外骨骼,髋关节组件002上部为,腰部组件001,如图5所示,所述的腰部组件001包括髋部支撑件110、腰板120和托架130;所述腰板120中部两侧对称设置有若干螺孔,所述髋部支撑件110能够通过不同的螺孔对称安装在腰板120两侧;通过使用不同螺孔能够调节腰部组件001宽度,可以根据不同穿戴者调整固定孔位,以满足不同身材穿戴者。当使用靠近腰板120中部的螺孔时,其腰部组件001较窄;当使用远离腰板120中部的螺孔时,其腰部组件001较宽。所述髋部支撑件110远离腰板120一侧设置有卡扣
结构,所述卡扣结构能够连接腰部绑缚组件;所述腰部绑缚组件能够将腰部组件001绑缚在穿戴者腰上,实现快速穿脱。示例性的,腰部绑缚组件使用登山装备中捆绑腰部的设备。所述托架130与所述腰板120上端固定连接;托架130可托起穿戴者负重背包的重量,并将负载重量通过外骨骼传递至地面。所述髋部支撑件110远离腰板120一侧设置有螺孔,髋部支撑件110通过螺孔与所述髋腰转接件220第一端固定连接。
65.本实用新型所设计的重载下肢外骨骼,膝关节组件003下部为髋关节组件002,如图7所示,所述的踝关节组件004包括小腿调节杆410、踝部组件420和足底组件430;所述小腿调节杆410上端与小腿杆件340下方踝连接孔配合,所述小腿调节杆410上端能够插入到小腿杆件340下方踝连接孔中并紧固;通过其插入深度能够调节,可以根据不同穿戴者身高腿长来调整插入深度,以满足不同身材穿戴者。所述小腿调节杆410下端与所述踝部组件420轴连接,所述小腿调节杆410能够绕其轴线自由旋转。本实用新型所设计的重载下肢外骨骼,匹配穿戴者实际运动空间,其踝关节组件004设置两个自由度,如图8所示,此处为踝屈伸度401。踝屈伸度401用于配合穿戴者完成踝关节屈伸动作。所述踝部组件420中部设置有踝旋转组件,所述踝部组件420能够沿踝旋转组件轴线自由旋转。本实用新型所设计的重载下肢外骨骼,匹配穿戴者实际运动空间,其踝关节组件004设置两个自由度,如图8所示,此处为踝内收外摆402。踝内收外摆402用于配合穿戴者完成脚内收外摆动作。所述踝部组件420下端与足底组件430顶部固定连接。所述足底组件430内部安装有压力传感器,所述压力传感器能够实时反馈足底压力。
66.本实用新型所设计的重载下肢外骨骼还包括电池组件,所述电池组件用于给电静液作动器310和行星电机210供电。
67.本实用新型所设计的基于电静液作动原理的混合驱动重载下肢外骨骼可以如下方法使用:
68.1)使用者调节腰部组件001宽度,并使用腰部绑缚组件将调节腰部组件001绑缚在使用者腰上;
69.2)使用者调节小腿调节杆410上端插入到小腿杆件340下方踝连接孔的深度;
70.3)使用者将足底组件430与脚或鞋固定;
71.4)使用者在托架130放置重物,使用重载下肢外骨骼运动。
72.本实用新型所设计的重载下肢外骨骼,还包括控制器、驱动器、传感器。在重载下肢外骨骼各部件设置有传感器,传感器能够感知各部分受力、旋转、电机输出等状态,驱动器接收传感器信号,通过控制器控制行星电机210和电静液作动器310。
73.为验证本实用新型的重载下肢外骨骼的助力效果,定量评价助力效率,完成人机功效学评估。根据士兵负重作业的规律和行为习惯,选取负重40kg、4km/h速度作为本次实验的目标动作。本实验随机选取了3名健康青年作为被试。被试者平均年龄25
±
5(y)、身高175.0
±
7.6(cm)。
74.为使本实验所建立的实验模型更接近于真实情况,同时保证人体运动学和动力学数据的有效性。本实验采用rx
‑
es39a柔性薄膜足底压力传感器解算平均助力效率,脚底薄膜式压力鞋垫共有四处采集点,安装在人体脚部与鞋子之间,并放置在鞋子内部。
75.本实验配置两种不同的工作状态:不穿外骨骼的负载实验和穿戴外骨骼的负载实验。受试者在两种情况下,分别以4km/h速度负重40kg在跑步机上行走,测试受试者足底压
力值。
76.采集受试者足底压力值,并进行整理分析,如图9所示,虚线部分为支撑态时左脚压力值,可见受试者在穿戴外骨骼情况下,其足底压力值降低,尤其是在支撑中段,平均值约为70%。
77.本实用新型所设计的基于电静液作动原理的混合驱动重载下肢外骨骼,能量利用率高、惯性冲击小、功率密度大、机动灵活、结构轻质紧凑,可以应用于军事负重、消防救援等大负载背负行进场景。
78.以上仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1