一种仿人型护理机器人的上身结构的制作方法
1.本实用新型属于康复医疗技术领域,具体涉及一种仿人型护理机器人的上身结构。
背景技术:
2.重大传染病和突发公共卫生事件发生时,常伴有医护人员感染,导致病患交叉感染、隔离环境难有效控制等难题。为解决这些难题及护士不足的问题,本技术研究远程操作仿人型护理机器人的上身结构,旨在研发一种具备消毒、患者健康状态监测、对患者进行搀扶、移动辅助、送饭(水)送药、喂饭(水)喂药、换输液袋、生活照料、推轮椅以及情感陪护等功能的仿人型护理机器人的上身结构,满足传染病房内多模式环境下的患者照顾需求。对解决疫情突发期间医护人员不足、无法为患者提供必要照护及24小时无缝监护等问题至关重要,社会意义重大。另一方面,机器人护士更有利于患者病历管理和医疗数据的积累、整理与传输,对提高医疗智能化水平,具有重要意义。仿人型护理机器人的上身结构也可用于普通病房、居家、养老机构等场所,可有效缓解我国人口老龄化背景下养老护理人手不足问题,从而减轻子女负担,提高老人的生活品质。
3.仿人型护理机器人上身零部件比较多,安装复杂,如果从下往上安装有的时候需要多人站立配合,下身不安装好无法进行上身的安装,安装过程较长。
技术实现要素:
4.本实用新型的目的是克服现有技术中存仿人型护理机器人安装复杂,安装工期长、需要多人配合才能完成安装的问题,提供一种方便安装且上身和下身能够同时分别安装的仿人型护理机器人的上身结构。
5.本实用新型解决其技术问题所采用的技术方案是:
6.一种仿人型护理机器人的上身结构,其特征在于:包括:第三连接架、固定在所述第三连接架上的第四连接架以及安装在所述第四连接架上的胸腔架,所述第四连接架上端中心处的前后侧具有安装挡块,两安装挡块之间为安装平面,所述安装平面的两侧对称设置有从中间向左右两侧向下倾斜的第一对接面;所述胸腔架包括相互平行设置的前侧板和后侧板、与所述第一对接面贴合安装的下侧板以及安装在所述前侧板和所述后侧板上端的上侧板;所述前侧板和所述后侧板通过螺栓紧贴所述安装挡块安装在所述安装平面上;所述上侧板与所述下侧板相互平行设置。
7.进一步地,所述安装平面上固定安装有锥形块,所述第四连接架的下部为镂空结构,所述安装平面上具有多个通孔,通过螺栓从所述第四连接架的下方穿入通孔将所述锥形块于所述第四连接架固定;所述前侧板和后侧板与固定连接在所述锥形块上。
8.进一步地,所述前侧板和所述后侧板的下端中间位置具有定位凸台,螺栓从所述第四连接架的下方穿过通孔与定位凸台连接;所述定位凸台紧贴所述安装挡块的内侧。
9.更进一步地,所述上侧板和所述下侧板之间固定连接有第一肩关节转轴,第一肩
关节转轴的两端通过轴承转动安装有第一肩关节蜗轮和第二肩关节蜗轮,所述第一肩关节蜗轮上同轴固定连接有第一肩关节主动锥齿轮,所述第二肩关节蜗轮上同轴固定连接有第二主动锥齿轮,所述第一肩关节主动锥齿轮和所述第二主动锥齿轮相对设置且均与第一肩关节从动锥齿轮啮合;所述第一肩关节从动锥齿轮的转轴固定连接第二肩关节连架,第一肩关节连架通过轴承与所述上侧板和所述下侧板转动连接。
10.本实用新型的一种仿人型护理机器人的上身结构的有益效果是:
11.1、本实用新型第三连接架内用于放置驱动器,同时在第三连接架上设置更小的第四连接架,可以将第四连接架及以上的部分进行安装、第三连接架及以下部分进行安装,两部分都安装完成后,直接将第四连接架通过螺栓固定在第三连接架上即可实现整个护理机器人的安装,安装过程方便快捷。
12.2、通过将第四连接架的第一对接面设置成从中间向左右两侧向下倾斜的斜面,使得相当于人肩部的第一肩关节连架也向下倾斜,与人体的肩部结构更接近,同时较窄的第四连接架给第一肩关节连架的转动提供较充足的避让空间。
13.3、可以将安装在胸腔架上的肩关节驱动零部件先分别安装在胸腔架的前侧板和后侧板上,然后将前侧板与后侧板固定在第四连接架上,定位凸台方便将前侧板和后侧板与第四连接架对接固定,然后通过螺栓将前侧板或后侧板与锥形块固定。锥形块同时对两侧的下侧板定位。
附图说明
14.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
15.图1是本实用新型实施例整体立体结构图;
16.图2是本实用新型实施例的上身缺省前侧板时结构图;
17.图3是图1中a部放大图;
18.图4是本实用新型实施例的上身部分结构图;
19.图5是本实用新型实施例的第四连接架立体结构图;
20.图6是本实用新型实施例的前侧板结构图。
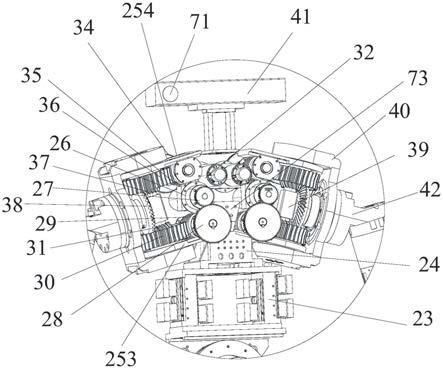
21.图中:1、麦克纳姆轮,2、俯仰支架,9、第一连接架,10、摆动支架,22、第二连接架,23、第三连接架,24、第四连接架,241、安装挡块,242、第一对接面,243、安装平面,25、胸腔架,251、前侧板,252、后侧板,253、下侧板,254、上侧板,255、定位凸台, 26、第一肩关节电机,27、第一主动齿轮,28、第一从动齿轮,29、第一肩关节蜗杆,30、第一肩关节蜗轮,31、第一肩关节主动锥齿轮,32、第二肩关节电机,34、第二从动齿轮,35、第二肩关节蜗杆,36、第二肩关节蜗轮,37、第二肩关节主动锥齿轮,38、第一肩关节从动锥齿轮,39、第一肩关节转轴,40、第一肩关节连架,41、头部组件,42、第二肩关节连接架,73、锥形块。
具体实施方式
22.现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
23.如图1-图6所示的本实用新型的一种仿人型护理机器人的上身结构的具体实施例,如图1所示的仿人型护理机器人,包括移动底座组件、前后俯仰组件、左右摆动组件、胸
腔架25、以及安装在胸腔架25左右两侧的上肢组件;
24.移动底座组件包括底架以及安装在底架四个角位置的四个麦克纳姆轮1;底架上放置有蓄电池。
25.参见图1,底架上固定安装有俯仰支架2,俯仰支架2上转动连接有第一连接架9,第一连接架9上安装有摆动支架10,摆动支架 10上转动连接有第二连接架22,第二连接架22上固定安装有第三连接架23,第三连接架23内安装驱动器,第三连接架23上固定有第四连接架24,
26.两上肢组件对称安装在胸腔架25的左右两侧,参见图1,上肢组件包括:肩关节组件,参见图2-如4,肩关节组件包括:安装在胸腔架25内的第一肩关节电机26、安装在第一肩关节电机26输出轴上的第一主动齿轮27、与第一主动齿轮27啮合的第一从动齿轮28、与第一从动齿轮28同轴连接的第一肩关节蜗杆29、与第一肩关节蜗杆29啮合的第一肩关节蜗轮30、与第一肩关节蜗轮30同轴固定连接的第一肩关节主动锥齿轮31、安装在胸腔架25内的第二肩关节电机32、安装在第二肩关节电机32输出轴上的第二主动齿轮未示出、与第二主动齿轮啮合的第二从动齿轮34、与第二从动齿轮34同轴连接的第二肩关节蜗杆35、与第二肩关节蜗杆35啮合的第二肩关节蜗轮36、与第二肩关节蜗轮36同轴连接的第二肩关节主动锥齿轮37 以及均与第一肩关节主动锥齿轮31和第二肩关节主动锥齿轮37啮合的第一肩关节从动锥齿轮38;第一肩关节主动锥齿轮31与第二肩关节主动锥齿轮37通过轴承相对安装在第一肩关节转轴39上。第一肩关节转轴39与胸腔架25的上下两端固定连接,第一肩关节从动锥齿轮38位于第一肩关节主动锥齿轮31和第二肩关节主动锥齿轮37之间。第一肩关节连架40通过轴承转动安装在第一肩关节转轴39的两端。
27.参见图5,第四连接架24上端中心处的前后侧具有安装挡块 241,两安装挡块241之间为安装平面243,安装平面243的两侧对称设置有从中间向左右两侧向下倾斜的第一对接面242。参见图2和图3,胸腔架25包括相互平行设置的前侧板251和后侧板252、与第一对接面242贴合安装的下侧板253以及安装在前侧板251和后侧板 252上端的上侧板254;前侧板251和后侧板(252)通过螺栓紧贴安装挡块241安装在安装平面243上;上侧板254与下侧板253相互平行设置。
28.参见图4,安装平面243上固定安装有锥形块73,第四连接架 24的下部为镂空结构,安装平面243上具有多个通孔,通过螺栓从第四连接架24的下方穿入通孔将锥形块73于第四连接架24固定;前侧板251和后侧板252与固定连接在锥形块73上。参见图6,前侧板251和后侧板252的下端中间位置具有定位凸台255,螺栓从第四连接架24的下方穿过通孔与定位凸台255连接;定位凸台255紧贴安装挡块241的内侧。
29.本实用新型第三连接架23内用于放置驱动器,同时在第三连接架23上设置更小的第四连接架24,可以将第四连接架24 及以上的部分进行安装、第三连接架23及以下部分进行安装,两部分都安装完成后,直接将第四连接架24通过螺栓固定在第三连接架23上即可实现整个护理机器人的安装,安装过程方便快捷。上身的各零部件可以放在地上或者安装平台上安装,一个人或者两个人配合就可以完成安装,可以将安装在胸腔架25 上的肩关节驱动零部件先分别安装在胸腔架25的前侧板251和后侧板252上,然后将前侧板251与后侧板252固定在第四连接架24上,定位凸台255方便将前侧板251和后侧板252与第四连接架24对接固定,然后通过螺栓将前侧板251或后侧板252 与锥形块73固定。锥形块73同时对两侧
的下侧板252定位。
30.本实用新型通过将第四连接架24的第一对接面24424设置成从中间向左右两侧向下倾斜的斜面,使得相当于人肩部的第一肩关节连架40也向下倾斜,与人体的肩部结构更接近,同时较窄的第四连接架给第一肩关节连架40的转动提供较充足的避让空间。
31.应当理解,以上所描述的具体实施例仅用于解释本实用新型,并不用于限定本实用新型。由本实用新型的精神所引伸出的显而易见的变化或变动仍处于本实用新型的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1