抓取强度高的机器人夹具的制作方法
1.本实用新型属于自动化生产技术领域,具体涉及抓取强度高的机器人夹具。
背景技术:
2.随着科学技术的发展以及自动化水平的提高,在对于表面喷漆处理中,为了批量处理以及提高工件的喷漆效率,通过装有挂钩的机械臂勾住网板后将其转移至喷漆室内;但该种取件方式仅通过挂钩勾住一侧,网板稳定性差;固定网板时需要预留较大的工件固定空间,联合驱动机构使用时占地面积大。由于在悬吊过程中网板稳定性差,不能确保工件固定时是否涂漆均匀,其抓取强度较低。
技术实现要素:
3.本实用新型要解决的技术问题是:针对上述缺陷,本实用新型提供一种抓取强度高的机器人夹具,该夹具从两侧边抓取网板,抓取牢固,过程可控,操作便捷。
4.本实用新型解决其技术问题采用的技术方案如下:抓取强度高的机器人夹具,包括固定骨架、设置在固定骨架上的左机械爪和右机械爪、设置在固定骨架两侧的滑轨组件,所述左机械爪上方设有左滑动组件,所述右机械爪上方设有右滑动组件,所述左滑动组件与滑轨组件相互配合,所述右滑动组件与滑轨组件相互配合;所述左机械爪通过左驱动气缸驱动左滑动组件从而带动左机械爪运动,所述右机械爪通过右驱动气缸驱动右滑动组件从而带动右机械爪运动。该种机器人夹具通过相互配合的左机械爪、右机械爪在左驱动气缸、右驱动气缸作用下相向或相背运动,实现网板的抓取或拆开,取用便捷,从两侧抓取,夹具与网板接触面积大,受力均匀,抓取牢固,过程可控,操作便捷。
5.进一步的,所述滑轨组件包括前滑轨和后滑轨;所述前滑轨和后滑轨分别设置在固定骨架两侧;
6.所述左滑动组件包括第一左滑块组、第二左滑块组、连接第一左滑块组和第二左滑块组的左连接块,所述左连接块右侧表面设有与左驱动气缸配合的左连接头;
7.所述右滑动组件包括第一右滑块组、第二右滑块组、连接第一右滑块组和第二右滑块组的右连接块,所述右连接块左侧表面设有与右驱动气缸配合的右连接头。引入的滑轨组件为两个滑轨,并通过相应的滑块组在滑轨上运动,夹具抓取网板后在滑轨组件上受力均匀,爪取时稳定性高。
8.更进一步的,所述第一左滑块组至少包括一个滑动块,所述第二左滑块组至少包括一个滑动块,所述第一右滑块组至少包括一个滑动块,所述第二右滑块组至少包括一个滑动块。引入的滑块组至少具有一个滑动块,可以进一步提高每个单独的滑动块上受力强度,该夹具稳定性好,可靠性高。
9.进一步的,还包括行程开关,所述行程开关包括发射器和接收器,所述发射器设置在左机械爪右侧表面,所述接收器设置在右机械爪左侧表面,所述发射器与接收器设置在同一水平面上。引入的行程开关,可以通过两个机械爪之间的距离判断是否对网板抓取紧
固,进一步确保网板抓取的可靠性。
10.进一步的,所述左机械爪包括左侧板和设置在左侧板下方的左横板,所述左横板设置在左侧板的右表面,所述左侧板与左横板形成l形结构;
11.所述右机械爪包括右侧板和设置在右侧板下方的右横板,所述右横板设置在右侧板的左表面,所述右侧板与右横板形成l形结构;
12.所述左机械爪与右机械爪镜像对称。
13.进一步的,还包括连接座,所述连接座设置在固定骨架上表面。引入的连接座,可以将夹具固定在旋转机构上,应用范围广,使用便捷。
14.本实用新型的有益效果是:
15.1、该种机器人夹具通过相互配合的左机械爪、右机械爪在左驱动气缸、右驱动气缸作用下相向或相背运动,实现网板的抓取或拆开,取用便捷,从两侧抓取,夹具与网板接触面积大,受力均匀,抓取牢固,过程可控,操作便捷。
16.2、引入的滑轨组件为两个滑轨,并通过相应的滑块组在滑轨上运动,夹具抓取网板后在滑轨组件上受力均匀,爪取时稳定性高;引入的滑块组至少具有一个滑动块,可以进一步提高每个单独的滑动块上受力强度,该夹具稳定性好,可靠性高;引入的行程开关,可以通过两个机械爪之间的距离判断是否对网板抓取紧固,进一步确保网板抓取的可靠性;引入的连接座,可以将夹具固定在旋转机构上,应用范围广,使用便捷。
附图说明
17.通过下面结合附图的详细描述,本实用新型前述的和其他的目的、特征和优点将变得显而易见。
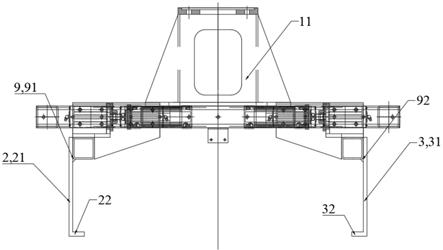
18.图1为本实用新型主视结构示意图;
19.图2为本实用新型俯视结构示意图;
20.图3为本实用新型右侧侧视结构示意图;
21.其中:1、固定骨架;11、连接座;2、左机械爪;21、左侧板;22、左横板;3、右机械爪;31、右侧板;32、右横板;4、滑轨组件;41、前滑轨;42、后滑轨;5、左滑动组件;51、第一左滑块组;52、第二左滑块组;53、左连接块;54、左连接头;6、右滑动组件;61、第一右滑块组;62、第二右滑块组;63、右连接块;64、右连接头;7、左驱动气缸;8、右驱动气缸;9、行程开关;91、发射器;92、接收器。
具体实施方式
22.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
23.参照图1—图3,抓取强度高的机器人夹具,包括固定骨架1、设置在固定骨架1上的左机械爪2和右机械爪3、设置在固定骨架1两侧的滑轨组件4,所述左机械爪2上方设有左滑动组件5,所述右机械爪3上方设有右滑动组件6,所述左滑动组件5与滑轨组件4相互配合,所述右滑动组件6与滑轨组件4相互配合;所述左机械爪2通过左驱动气缸7驱动左滑动组件5从而带动左机械爪2运动,所述右机械爪3通过右驱动气缸8驱动右滑动组件6从而带动右
机械爪3运动。
24.所述左机械爪2包括左侧板21和设置在左侧板21下方的左横板22,所述左横板22设置在左侧板21的右表面,所述左侧板21与左横板22形成l形结构;所述右机械爪3包括右侧板31和设置在右侧板31下方的右横板32,所述右横板32设置在右侧板31的左表面,所述右侧板31与右横板32形成l形结构;所述左机械爪2与右机械爪3镜像对称。
25.所述滑轨组件4包括前滑轨41和后滑轨42;所述前滑轨41和后滑轨42分别设置在固定骨架1两侧;
26.所述左滑动组件5包括第一左滑块组51、第二左滑块组52、连接第一左滑块组51和第二左滑块组52的左连接块53,所述左连接块53右侧表面设有与左驱动气缸7配合的左连接头54;所述第一左滑块组51至少包括一个滑动块,所述第二左滑块组52至少包括一个滑动块,本实施例优选第一左滑块组51具有两个滑动块,第二左滑块组52具有两个滑动块;
27.所述右滑动组件6包括第一右滑块组61、第二右滑块组62、连接第一右滑块组61和第二右滑块组62的右连接块63,所述右连接块63左侧表面设有与右驱动气缸8配合的右连接头64;所述第一右滑块组61至少包括一个滑动块,所述第二右滑块组62至少包括一个滑动块;本实施例优选第一右滑块组61具有两个滑动块,第二右滑块组62具有两个滑动块;
28.为了判断该夹具是否夹紧网板,还包括用于监测距离的行程开关9,所述行程开关9包括发射器91和接收器92,所述发射器91设置在左机械爪2右侧表面,所述接收器92设置在右机械爪3左侧表面,所述发射器91与接收器92设置在同一水平面上。
29.为了便于将该机器人夹具与其他搬运机构连接,还包括连接座11,所述连接座11设置在固定骨架1上表面。
30.该种机器人夹具通过相互配合的左机械爪、右机械爪在左驱动气缸、右驱动气缸作用下相向或相背运动,实现网板的抓取或拆开,取用便捷,从两侧抓取,夹具与网板接触面积大,受力均匀,抓取牢固,过程可控,操作便捷。
31.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1