一种夹抱式三坐标机械手的制作方法
1.本实用新型涉及机械手技术领域,特别涉及一种夹抱式三坐标机械手。
背景技术:
2.随着现代科技的不断进步发展,在工业4.0的旗帜下自动化设备越来越多样化、智能化和人性化。近年来三坐标机械手作为新型的自动化设备渐渐进入了人们的视野,而且被使用在了各行各业之中。现在新时代以创新为主的驱使下,人们对三坐标机械手也有了更高的要求。
3.目前市场上的三坐标机械手大都如出一辙,没有新意,结构复杂,价格昂贵,功能也比较单一,远远满足不了各行各业在实际使用中的需求,并且夹抱装置不可旋转,对于需要将货物旋转后放置的工况,不能够将货物放置正确位置,结构设计不够人性化,智能化。
4.因此,有必要提供一种夹抱式三坐标机械手解决上述技术问题。
技术实现要素:
5.本实用新型的目的在于提供一种夹抱式三坐标机械手,以解决上述背景技术中现有三坐标机械手大都如出一辙,没有新意,结构复杂,价格昂贵,功能也比较单一,远远满足不了各行各业在实际使用中的需求,并且夹抱装置不可旋转,对于需要将货物旋转后放置的工况,不能够将货物放置正确位置,结构设计不够人性化,智能化的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种夹抱式三坐标机械手,包括机架,还包括设置于机架顶部的主梁,所述主梁与机架滑动连接;
7.设置于机架上带动主梁沿x轴方向移动的x轴向移动机构;
8.设置于主梁上的y轴向移动机构;
9.设置于主梁一侧的z轴向移动机构;
10.设置于z轴向移动机构底端的夹紧机构。
11.具体使用时,通过x轴向移动机构能够带动主梁在机架上左右移动,当移动至合适位置时,通过主梁上的y轴向移动机构能够带动z轴向移动机构沿着前后方向进行移动,之后,通过z轴向移动机构能够带动其底端的夹紧机构上下运动,通过x轴向移动机构、y轴向移动机构和z轴向移动机构的配合,能够实现夹紧机构在x轴、y轴和z轴三个方向上的移动,从而将夹紧机构驱动至需要夹紧的物料处,夹紧机构动作进而将物料夹紧然后搬运至另一位置,夹紧机构具有自定心和旋转功能,自定心功能对于不同种类的货物能够夹持的更加牢固;旋转功能够使货物在搬运的过程中适应不同的工况。
12.作为本实用新型的进一步方案,所述x轴向移动机构包括第一伺服电机,所述第一伺服电机输出端固定连接有第一传动轴,所述机架顶部设置有第一同步带轮,所述第一传动轴贯穿第一同步带轮并与第一同步带轮固定连接,所述第一同步带轮外侧设置有第一同步带,所述主梁一侧设置有导向块,所述第一同步带上半部分贯穿导向块和主梁,并且导向块和主梁均与第一同步带上半部分固定连接。
13.具体使用时,通过第一伺服电机输出端可以带动第一传动轴转动,从而带动第一同步带轮转动,进而带动第一同步带运动,使驱动导向块在机架上滑动,通过导向块带动主梁在机架上滑动可以使主梁及主梁上设置的机构沿着x轴方向进行运动。
14.作为本实用新型的进一步方案,所述y轴向移动机构包括设置于主梁一侧的第一电缸,所述第一电缸设置于z轴向移动机构前后两侧,所述第一电缸输出端与z轴向移动机构相接触。
15.具体使用时,通过第一电缸输出端带动连接板沿着主梁前后运动,通过滑块与滑轨滑动连接,可以提高连接板前后移动的稳定性,而通过连接板可以带动z轴向移动机构沿着主梁前后移动。
16.作为本实用新型的进一步方案,所述主梁一侧固定连接有连接板,所述z轴向移动机构通过螺栓与连接板相固定,所述连接板靠近主梁一侧固定连接有滑块,所述主梁内部设置有滑轨,所述滑块滑动连接于滑轨内部。
17.具体使用时,滑块滑动连接于滑轨内部有利于提高z轴向移动机构移动的稳定性。
18.作为本实用新型的进一步方案,所述z轴向移动机构包括与连接板相固定的立板,所述立板顶端固定连接有第二伺服电机,所述第二伺服电机输出端固定连接有第二传动轴,所述立板顶部设置有第二同步带轮,所述第二同步带轮外侧设置有第二同步带,所述第二传动轴贯穿第二同步带轮并与第二同步带轮固定连接。
19.具体使用时,通过第二伺服电机输出端可以带动第二传动轴转动,从而带动第二同步带转动,通过第二同步带可以带动滑板在立板一侧滑动,进而驱使z轴向移动机构底部的夹紧机构上下运动。
20.作为本实用新型的进一步方案,所述立板一侧设置有滑板,所述夹紧机构通过螺栓固定连接于滑板底部,所述滑板靠近立板一侧固定连接有凸块,所述立板一侧设置有与凸块相配合的条形槽,所述滑板外侧固定连接有驱动板,所述第二同步带左半部分贯穿驱动板并与驱动板固定连接。
21.具体使用时,第二同步带左半部分贯穿驱动板并与驱动板固定连接有利于带动驱动板上下移动,从而带动滑板上下移动。
22.作为本实用新型的进一步方案,所述夹紧机构包括上固定板和下固定板,所述上固定板通过螺栓与滑板相固定,所述下固定板底部固定连接有抓取框架,所述抓取框架内侧转动连接有夹紧臂,所述夹紧臂内侧设置有第二电缸,所述第二电缸输出端与夹紧臂内侧相接触,所述夹紧臂外侧设置有第三伺服电机,所述第三伺服电机输出端固定连接有第三传动轴,所述夹紧臂内侧设置有圆筒,所述第三传动轴贯穿圆筒并延伸至圆筒外侧,所述第三传动轴一端设置有端座,所述端座内侧螺纹连接有夹板。
23.具体使用时,通过第二电缸带动夹紧臂顶端偏转,从而带动夹紧臂底端向内侧偏转,进而带动夹板向内侧运动,有利于将货物夹紧,而夹板设置为v型,有利于夹紧弧形表面的物体,在实际操作时,可以根据物品的不同形状来更换夹板,通过设置有第三伺服电机可以带动端座转动,从而带动货物旋转,对于需要将货物旋转后放置的工况,有利于促使货物转动至正确位置,以适应多种堆垛方式,从而使得夹抱式三坐标机械手能够将物品转动至正确位置再进行码放,更加人性化和智能化。
24.作为本实用新型的进一步方案,所述上固定板外侧设置有触底检测开关,所述下
固定板顶部固定连接有滑杆,所述上固定板顶部固定连接有套筒,所述滑杆贯穿上固定板并延伸至套筒内部,所述套筒内部设置有弹簧,所述弹簧置于滑杆顶部。
25.具体使用时,当货物与地面接触时,能够挤压下固定板向上运动,从而使得下固定板与触底检测开关相接触,从而发生警报,通过设置有弹簧可以对下固定板向上运动的过程进行缓冲。
26.作为本实用新型的进一步方案,所述端座底端设置有竖板,所述竖板底端设置有货物探测开关,所述竖板上设置有旋转到位检测开关,所述触底检测开关、货物探测开关和旋转到位检测开关均为光电开关。
27.具体使用时,而通过设置有货物探测开关,可以检测到夹板内侧是否还有货物,从而夹板能够完全脱离货物,能够避免夹板收回时与货物发生碰撞,而旋转到位检测开关可以检测货物旋转的角度。
28.本实用新型所述的一种夹抱式三坐标机械手,本实用新型通过第二伺服电机输出端可以带动第二传动轴转动,从而带动第二同步带转动,通过第二同步带可以带动滑板在立板一侧滑动,进而驱使z轴向移动机构底部的夹紧机构上下运动,当货物与地面接触时,能够挤压下固定板向上运动,从而使得下固定板与触底检测开关相接触,从而发生警报,而通过设置有货物探测开关,可以检测到夹板内侧是否还有货物,从而夹板能够完全脱离货物,能够避免夹板收回时与货物发生碰撞,而旋转到位检测开关可以检测货物旋转的角度,夹持装置在实际使用过程中可以旋转,从而能够将物品转动至正确位置在进行码放,更加人性化和智能化。
附图说明
29.下面结合附图和实施例对本实用新型进一步说明。
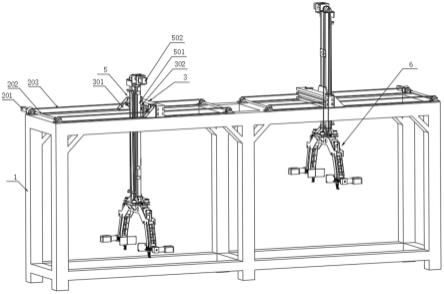
30.图1是本实用新型的整体结构示意图;
31.图2是本实用新型的机架结构示意图;
32.图3是本实用新型的第一同步带结构示意图;
33.图4是本实用新型的y轴向移动机构结构示意图;
34.图5是本实用新型的抓取框架结构示意图;
35.图6是本实用新型的夹紧机构结构示意图;
36.图7是本实用新型的导向块结构示意图;
37.图8是本实用新型图3的a部结构放大图。
38.图中:1、机架;2、x轴向移动机构;201、第一伺服电机;202、第一传动轴;203、第一同步带;3、主梁;301、导向块;302、连接板;303、滑块;4、y轴向移动机构;401、第一电缸;5、z轴向移动机构;501、立板;502、第二伺服电机;503、第二传动轴;504、第二同步带;505、滑板;506、限位块;507、驱动板;508、挡块;6、夹紧机构;601、上固定板;602、下固定板;603、触底检测开关;604、滑杆;605、套筒;606、抓取框架;607、夹紧臂;608、第二电缸;609、第三伺服电机;610、圆筒;611、端座;612、夹板;613、竖板。
具体实施方式
39.如图1-4和图7所示,一种夹抱式三坐标机械手,包括机架1,所述机架1上沿x轴方
向设置有x轴向移动机构2,所述机架1顶部设置有主梁3,所述主梁3上设置有y轴向移动机构4,所述主梁3一侧设置有z轴向移动机构5,所述z轴向移动机构5底端连接有夹紧机构6。
40.使用时,通过x轴向移动机构2带动主梁3在机架1上左右移动,当移动至合适位置时,通过主梁3上的y轴向移动机构4带动z轴向移动机构5沿着前后方向进行移动,之后,通过z轴向移动机构5带动其底端的夹紧机构6上下运动,通过x轴向移动机构2、y轴向移动机构4和z轴向移动机构5的配合运动,能够实现夹紧机构6在x轴、y轴和z轴三个方向上的移动,从而将夹紧机构6驱动至需要夹紧的物料处,进而将物料夹紧然后搬运至另一位置。
41.如图1-3所示,所述x轴向移动机构2包括第一伺服电机201,所述第一伺服电机201输出端固定连接有第一传动轴202,所述机架1顶部设置有基座,所述基座内侧设置有第一同步带轮,所述第一传动轴202贯穿第一同步带轮并与第一同步带轮固定连接,所述第一同步带轮外侧设置有第一同步带203,所述主梁3一侧设置有导向块301,所述导向块301滑动连接于机架1顶部,所述第一同步带203上半部分贯穿导向块301和主梁3,并且导向块301和主梁3与第一同步带203上半部分固定连接,所述第一同步带轮另一侧设置有第一转向轮,所述第一同步带203设置于第一转向轮外侧。
42.使用时,通过第一伺服电机输出端可以带动第一传动轴转动,从而带动第一同步带轮转动,进而带动第一同步带运动,使驱动导向块在机架上滑动,通过导向块带动主梁在机架上滑动可以使主梁及主梁上设置的机构沿着x轴方向进行运动。
43.如图7-8所示,所述y轴向移动机构4包括设置于主梁3一侧的第一电缸401,所述第一电缸401设置于z轴向移动机构5前后两侧,所述第一电缸401与导向块301固定连接,所述第一电缸401输出端与z轴向移动机构5相接触,所述主梁3一侧固定连接有连接板302,所述z轴向移动机构5通过螺栓与连接板302相固定,所述连接板302靠近主梁3一侧固定连接有滑块303,所述主梁3内部设置有滑轨,所述滑块303与滑轨滑动连接。
44.使用时,通过第一电缸401输出端带动连接板302沿着主梁3前后运动,通过滑块303于滑轨滑动连接,可以提高连接板302前后移动的稳定性,而通过连接板302可以带动z轴向移动机构5沿着主梁3前后移动。
45.如图4和图8所示,z轴向移动机构5包括与连接板302相固定的立板501,所述立板501顶端固定连接有第二伺服电机502,所述第二伺服电机502输出端固定连接有第二传动轴503,所述立板501一侧固定连接有底座,所述立板501顶部设置有第二同步带轮,所述立板501底部设置有第二转向轮,所述第二同步带轮和第二转向轮外侧设置有第二同步带504,所述第二传动轴503贯穿第二同步带轮并与第二同步带轮固定连接。
46.进一步地,所述立板501一侧设置有滑板505,所述夹紧机构6通过螺栓固定连接于滑板505底部,所述滑板505靠近立板501一侧固定连接有凸块,所述立板501一侧设置有与凸块相配合的条形槽,所述条形槽和凸块的截面形状均设置为t型,所述滑板外侧固定连接有驱动板507,所述第二同步带504左半部分贯穿驱动板507并与驱动板507固定连接。
47.再进一步地,所述立板501前侧底端设置有限位块506,所述立板501外侧固定连接有挡块508,所述挡块508设置于限位块506顶端。
48.使用时,通过第二伺服电机502输出端可以带动第二传动轴503转动,从而带动第二同步带504转动,通过第二同步带504可以带动滑板505在立板501一侧滑动,进而驱使z轴向移动机构5底部的夹紧机构6上下运动,通过设置有限位块506,当滑板505运动至最低位
置能够与限位块506相接触,通过限位块506能够控制滑板505带动夹紧机构6向下运动的最低位置,从而对需要夹紧的物品进行保护,防止与地面发生碰撞。
49.如图5-8所示,所述夹紧机构6包括上固定板601和下固定板602,所述上固定板601外侧设置有触底检测开关603,所述下固定板602顶部固定连接有滑杆604,所述上固定板601顶部固定连接有套筒605,所述滑杆604贯穿上固定板601并延伸至套筒605内部,所述套筒605内部设置有弹簧,所述弹簧置于滑杆604顶部,所述上固定板601通过螺栓与滑板505相固定,所述下固定板602底部固定连接有抓取框架606,所述抓取框架606内侧转动连接有夹紧臂607,所述夹紧臂607内侧设置有第二电缸608,所述第二电缸608与抓取框架606固定连接,所述第二电缸608输出端与夹紧臂607内侧相接触,所述夹紧臂607外侧设置有第三伺服电机609,所述第三伺服电机609输出端固定连接有第三传动轴,所述夹紧臂607内侧设置有圆筒610,所述圆筒610通过螺钉与夹紧臂607相固定,所述第三传动轴贯穿圆筒610并延伸至圆筒610外侧,所述第三传动轴一端设置有端座611,所述端座611内侧螺纹连接有夹板612,所述夹板612设置为v型。
50.进一步地,所述端座611底端设置有竖板613,所述竖板613底端设置有货物探测开关,所述竖板613靠近货物一侧设置有旋转到位检测开关,所述触底检测开关603、货物探测开关和旋转到位检测开关均为光电开关。
51.使用时,通过第二电缸608带动夹紧臂607顶端偏转,从而带动夹紧臂607底端向内侧偏转,进而带动夹板612向内侧运动,有利于将货物夹紧,而夹板612设置为v型,有利于夹紧弧形表面的物体,在实际操作时,可以根据物品的不同形状来更换夹板612,通过设置有第三伺服电机609可以带动端座转动,从而带动货物旋转,对于需要将货物旋转后放置的工况,有利于促使货物转动至正确位置,以适应多种堆垛方式,从而使得夹抱式三坐标机械手能够将物品转动至正确位置再进行码放,更加人性化和智能化。
52.当货物与地面接触时,能够挤压下固定板602向上运动,从而使得下固定板602与触底检测开关603相接触,从而发生警报,通过设置有弹簧可以对下固定板602向上运动的过程进行缓冲,而通过设置有货物探测开关,可以检测到夹板612内侧是否还有货物,从而夹板612能够完全脱离货物,能够避免夹板612收回时与货物发生碰撞,而旋转到位检测开关可以检测货物旋转的角度。
53.工作原理:通过第一伺服电机201输出端可以带动第一传动轴202转动,从而带动第一同步带轮转动,有利于带动第一同步带203转动,进而驱动导向块301在机架1上滑动,有利于带动主梁3在机架1上滑动,通过第一电缸401输出端带动连接板302沿着主梁3前后运动,进而带动z轴向移动机构5前后移动,通过第二伺服电机502输出端可以带动第二传动轴503转动,从而带动第二同步带504转动,通过第二同步带504可以带动滑板505在立板501一侧滑动,进而驱使z轴向移动机构5底部的夹紧机构6上下运动,通过设置有限位块506,当滑板505运动至最低位置能够与限位块506相接触,通过限位块506能够控制滑板505带动夹紧机构6向下运动的最低位置,从而对需要夹紧的物品进行保护,防止与地面发生碰撞,通过第二电缸608带动夹紧臂607顶端偏转,从而带动夹紧臂607底端向内侧偏转,进而带动夹板612向内侧运动,有利于将货物夹紧,而夹板612设置为v型,有利于夹紧弧形表面的物体,在实际操作时,可以根据物品的不同形状来更换夹板612,通过设置有第三伺服电机609可以带动端座转动,从而带动货物旋转,对于需要将货物旋转后放置的工况,有利于促使货物
转动至正确位置,以适应多种堆垛方式,从而使得夹抱式三坐标机械手能够将物品转动至正确位置再进行码放,更加人性化和智能化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1