一种电芯抓取机构的制作方法
1.本实用新型涉及锂电池电芯制造领域,具体地是涉及一种用于大卷径卷绕机的电芯抓取机构。
背景技术:
2.现有的用于大卷径卷绕机的电芯抓取机构,用于夹持电芯的机械手通常为一个。在进行下料时,通过电芯抓取机构的一个机械手夹持圆环状的电芯,将不能充分的固定住电芯,易出现卷绕机的卷针机构退针困难等问题,下料不方便。
技术实现要素:
3.为了克服现有技术的不足,本实用新型提供一种电芯抓取机构,可充分的固定住电芯,下料方便。
4.本实用新型解决其技术问题所采用的技术方案是:
5.一种电芯抓取机构,包括机架,还包括用于夹持电芯的多个机械手,所述多个机械手设置到所述机架的后侧,所述多个机械手位于同一竖直面内且沿同一圆周均匀分布,所述机械手包括前后驱动机构和安装到所述前后驱动机构顶端的用于夹持电芯的下料爪机构,所述前后驱动机构可驱动所述下料爪机构沿前后方向移动。
6.作为优选的技术方案,所述多个机械手中,其中两个机械手分别位于所述多个机械手所在圆周的圆心的两侧并关于所述圆心对称,剩余的机械手中,其中一部分机械手位于所述多个机械手所在圆周的圆心的上方,另外一部分机械手位于所述多个机械手所在圆周的圆心的下方。
7.作为优选的技术方案,所述下料爪机构包括气缸固定板、下料爪气缸、第一下料爪和第二下料爪;所述气缸固定板、下料爪气缸依次安装到所述前后驱动机构的顶端,所述气缸固定板的靠近所述机架前侧的一端安装有安装板,所述第一下料爪安装到所述安装板,所述第二下料爪安装到所述下料爪气缸的靠近所述机架前侧的一端;所述第一下料爪和第二下料爪呈相对设置;所述下料爪气缸可驱动所述第二下料爪朝靠近或远离所述第一下料爪的方向移动。
8.作为优选的技术方案,所述第一下料爪包括第一连接杆和第一套件,所述第一连接杆的一端安装到所述安装板,另一端套设有所述第一套件,所述第一套件的截面形状呈圆状。
9.作为优选的技术方案,所述第二下料爪包括第二连接杆和第二套件,所述第二连接杆的一端安装到所述下料爪气缸的靠近机架前侧的一端,另一端套设有所述第二套件,所述第二套件的截面形状呈圆状。
10.作为优选的技术方案,位于所述多个机械手所在圆周的圆心的两侧的两个机械手,其第一下料爪和第二下料爪呈左右相对设置,且其第一下料爪靠近所述圆心;位于所述多个机械手所在圆周的圆心的上方的机械手,其第一下料爪和第二下料爪呈上下相对设
置,且其第一下料爪位于第二下料爪的下方;位于所述多个机械手所在圆周的圆心的下方的机械手,其第一下料爪和第二下料爪呈上下相对设置,且其第一下料爪位于第二下料爪的上方。
11.作为优选的技术方案,位于所述多个机械手所在圆周的圆心的两侧的两个机械手,分别安装到第一横向驱动机构的顶端,两个第一横向驱动机构呈左右相对设置;位于所述多个机械手所在圆周的圆心的上方的机械手,都安装到第二横向驱动机构的底端;位于所述多个机械手所在圆周的圆心的下方的机械手,都安装到第三横向驱动机构的顶端;所述第二横向驱动机构和第三横向驱动机构呈上下相对设置。
12.作为优选的技术方案,所述机架包括底框架以及安装到所述底框架后侧的两个第一安装架、基板,所述两个第一安装架分别靠近所述底框架的两端,所述基板位于所述两个第一安装架之间;所述两个第一横向驱动机构分别安装到所述两个第一安装架的顶端;所述第二横向驱动机构安装到第一竖向驱动机构,所述第一竖向驱动机构安装到所述基板的上端;所述第三横向驱动机构安装到第二竖向驱动机构,所述第二竖向驱动机构安装到所述基板的下端;所述第一竖向驱动机构和第二竖向驱动机构呈上下相对设置。
13.作为优选的技术方案,所述底框架的前侧安装有两个第二安装架,所述两个第二安装架分别靠近所述底框架的两端;所述电芯抓取机构还包括两个上下驱动机构和用于放置电芯的托盘,所述两个上下驱动机构分别安装到所述两个第二安装架,所述托盘的两端分别安装到所述两个上下驱动机构并位于所述机架的内侧,所述两个上下驱动机构可驱动所述托盘沿上下方向移动。
14.本实用新型的有益效果是:本实用新型通过沿同一圆周均匀分布的多个机械手对电芯进行夹持,能充分固定住电芯,避免了因电芯过多贴合在卷针机构的卷针上而出现卷针机构退针困难等问题,方便下料。
附图说明
15.下面结合附图和实施例对本实用新型进一步说明。
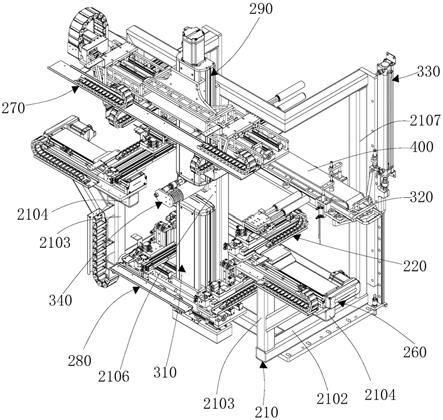
16.图1是本实用新型一实施例提供的一种电芯抓取机构的结构示意图;
17.图2是图1所示电芯抓取机构去掉上下驱动机构、托盘和支撑件后的结构示意图;
18.图3是图1所示电芯抓取机构的第一横向驱动机构和机械手组装后的结构示意图;
19.图4是图1所示电芯抓取机构的第二横向驱动机构、第一竖向驱动机构与两个机械手的爆炸示意图;
20.图5是图1所示电芯抓取机构的第三横向驱动机构、第二竖向驱动机构与两个机械手的爆炸示意图。
具体实施方式
21.以下将结合实施例和附图对本实用新型的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本实用新型的目的、特征和效果。显然,所描述的实施例只是本实用新型的一部分实施例,而不是全部实施例,基于本实用新型的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本实用新型保护的范围。另外,专利中涉及到的所有联接/连接关系,并非单指构件直接相接,而是指可根据具体
实施情况,通过添加或减少联接辅件,来组成更优的联接结构。本实用新型创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合。
22.请参照图1和图2,本实用新型一实施例提供的一种电芯抓取机构,主要应用于大卷径卷绕机。该电芯抓取机构包括机架210和用于夹持电芯的多个机械手220。多个机械手220设置到机架210的后侧。多个机械手220位于同一竖直面内且沿同一圆周均匀分布。在实际应用时,多个机械手220与卷绕机的卷针机构的圆形卷针是对应的,卷针机构的卷针可从机架210的前侧移入到机架210内并与多个机械手相对,在通过卷针卷绕成型圆环状的电芯并进行贴胶工序后,通过多个机械手220可实现对电芯进行同时夹持,从而方便下料。本实用新型通过沿同一圆周均匀分布的多个机械手220同时对电芯进行夹持,能充分固定住电芯,避免了因电芯过多贴合在卷针机构的卷针上而出现卷针机构退针困难等问题,方便下料。
23.多个机械手220中,其中两个机械手220分别位于多个机械手220所在圆周的圆心的两侧并关于所述圆心对称,剩余的机械手220中,其中一部分机械手220位于所述多个机械手220所在圆周的圆心的上方,另外一部分机械手220位于所述多个机械手220所在圆周的圆心的下方。
24.本实施例中,机械手220的数量为六个。六个机械手220中,其中两个机械手220分别位于六个机械手220所在圆周的圆心的两侧并关于该圆心对称,其中两个机械手220分别位于六个机械手220所在圆周的圆心的上方并关于该圆心对称,剩下的两个机械手220分别位于六个机械手220所在圆周的圆心的下方并关于该圆心对称。
25.在其他实施方式中,机械手220的数量也可以是其他,例如四个、五个、八个等,可根据实际情况设置机械手220的数量。
26.机架210包括长方形的底框架2102以及安装到底框架2102后侧的两个第一安装架、基板2106。两个第一安装架分别靠近底框架2102的两端,基板2106位于两个第一安装架之间。两个第一安装架关于基板2106对称。
27.第一安装架包括安装到底框架2102后侧的竖向立柱2103、安装到竖向立柱2103顶端的横向立柱2104。竖向立柱2103、基板2106均沿机架210的轴向延伸。横向立柱2104沿机架210的横向(即长度方向)延伸。
28.位于六个机械手220所在圆周的圆心的两侧的两个机械手220,分别安装到第一横向驱动机构260的顶端,两个第一横向驱动机构260呈左右相对设置,两个第一横向驱动机构260可驱动该两个机械手220沿左右方向进行同步相向或相背离移动。两个第一横向驱动机构260分别通过固定板2602(见图2)安装到两个第一安装架的横向立柱2104的顶端。
29.结合图3所示,机械手220包括前后驱动机构230和下料爪机构240。下料爪机构240用于夹持电芯。前后驱动机构230通过固定板2302安装到对应的第一横向驱动机构260的顶端。下料爪机构240安装到前后驱动机构230的顶端,前后驱动机构230可驱动下料爪机构240沿前后方向移动。第一横向驱动机构260、前后驱动机构230均为现有的驱动机构,第一横向驱动机构260为一直线模组,前后驱动机构230为一气缸驱动机构。
30.下料爪机构240包括气缸固定板2402、下料爪气缸2404、第一下料爪2406和第二下料爪2408。气缸固定板2402、下料爪气缸2404依次安装到前后驱动机构230的顶端。气缸固定板2402的靠近机架210前侧的一端安装有安装板2405,第一下料爪2406安装到安装板
2405,第二下料爪2408安装到下料爪气缸2404的靠近机架210前侧的一端,第一下料爪2406和第二下料爪2408呈左右相对设置,下料爪气缸2404可驱动第二下料爪2408朝靠近或远离第一下料爪2406的方向移动。位于六个机械手220所在圆周的圆心的两侧的两个机械手220,其第一下料爪2406都靠近该圆心。
31.在实际应用时,第一下料爪2406与卷针上的凹位是对应的,当电芯在卷针上卷绕成型并进行贴胶工序后,通过前后驱动机构230驱动下料爪机构240朝机架210的前侧移动,直到第一下料爪2406伸入到卷针的对应的凹位内,使第一下料爪2406位于电芯的内侧,此时第二下料爪2408位于电芯的外侧,然后下料爪气缸2404驱动第二下料爪2408朝靠近第一下料爪2406的方向移动以实现将电芯夹持。
32.优选地,第一下料爪2406包括第一连接杆2406a和第一套件2406b,第一连接杆2406a的一端安装到安装板2405,另一端套设有所述第一套件2406b。第一套件2406b的截面形状呈圆状。第二下料爪2408包括第二连接杆2408a和第二套件2408b,第二连接杆2408a的一端安装到下料爪气缸2404的靠近机架210前侧的一端,另一端套设有所述第二套件2408b。第二套件2408b的截面形状呈圆状。在实际应用时,主要是通过第一套件2406b伸入到卷针的对应的凹位内,然后通过第一套件2406b和第二套件2408b实现对电芯的夹持。设置的第一套件2406b、第二套件2408b的截面形状均呈圆状,可避免损坏电芯。
33.位于六个机械手220所在圆周的圆心的上方的两个机械手220,都安装到第二横向驱动机构270的底端,第二横向驱动机构270可驱动该两个机械手220沿左右方向进行同步相向或相背离移动。第二横向驱动机构270安装到第一竖向驱动机构290,第一竖向驱动机构290安装到基板2106的上端,第一竖向驱动机构290可驱动第二横向驱动机构270沿上下方向移动,从而通过第二横向驱动机构270,可带动位于六个机械手220所在圆周的圆心的上方的两个机械手220沿上下方向移动。
34.结合图4所示,第二横向驱动机构270和第一竖向驱动机构290均为现有的驱动机构,第一竖向驱动机构290为一直线模组,第二横向驱动机构270由电机、底板2701、安装到底板2701顶端的丝杆2702、安装到底板2701顶端的两组滑轨2703、两个滑动板2704等组成。第二横向驱动机构270通过其底板2701安装到第一竖向驱动机构290。两组滑轨2703分别靠近底板2701的两端,两个滑动板2704分别安装到两组滑轨2703的顶端。丝杆2702的两端分别通过丝杆螺母与两个滑动板2704的底端连接,从而两个滑动板2704可在丝杆2702的驱动下沿左右方向进行同步相向或相背离移动。每个滑动板2704的两端分别安装有两个连接支架2706,两个连接支架2706的底端分别穿过底板2701并位于第二横向驱动机构270的下方,位于六个机械手220所在圆周的圆心的上方的两个机械手220分别安装到对应的两个连接支架2706的底端。
35.位于六个机械手220所在圆周的圆心的上方的两个机械手220与位于六个机械手220所在圆周的圆心的两侧的两个机械手220的结构、工作原理基本相同,不同的是,机械手220的前后驱动机构230通过固定板2302安装到对应的两个连接支架2706的底端的靠近圆心的一侧,从而通过两个滑动板2704可带动两个机械手220沿左右方向进行同步相向或相背离移动。机械手220的第一下料爪2406和第二下料爪2408呈上下相对设置,第一下料爪2406位于第二下料爪2408的下方。在实际应用时,也是通过第一下料爪2406伸入到卷针的对应的凹位内,使第一下料爪2406位于电芯的内侧,此时第二下料爪2408位于电芯的外侧,
然后下料爪气缸2404驱动第二下料爪2408朝靠近第一下料爪2406的方向移动以实现将电芯夹持。
36.位于六个机械手220所在圆周的圆心的下方的两个机械手220,都安装到第三横向驱动机构280的顶端,第三横向驱动机构280可驱动该两个机械手220沿左右方向进行同步相向或相背离移动。第二横向驱动机构270和第三横向驱动机构280呈上下相对设置。第三横向驱动机构280安装到第二竖向驱动机构310,第二竖向驱动机构310安装到基板2106的下端,第二竖向驱动机构310可驱动第三横向驱动机构280沿上下方向移动,从而通过第三横向驱动机280构可带动位于六个机械手220所在圆周的圆心的下方的两个机械手220沿上下方向移动。第一竖向驱动机构290和第二竖向驱动机构310呈上下相对设置。
37.结合图5所示,第三横向驱动机构280和第二竖向驱动机构310均为现有的驱动机构,第二竖向驱动机构310为一直线模组,第三横向驱动机构280由电机、底板2801、安装到底板2801顶端的丝杆2802、安装到底板2801顶端的两组滑轨2803、两个滑动板2804等组成。第三横向驱动机构280通过其底板2801安装到第二竖向驱动机构310。两组滑轨2803分别靠近底板2801的两端,两个滑动板2804分别安装到两组滑轨2803的顶端。丝杆2802的两端分别通过丝杆螺母与两个滑动板2804的底端连接,从而两个滑动板2804可在丝杆2802的驱动下沿左右方向进行同步相向或相背离移动。位于六个机械手220所在圆周的圆心的下方的两个机械手220分别安装到对应的滑动板2804的顶端。
38.位于六个机械手220所在圆周的圆心的下方的两个机械手220与位于六个机械手220所在圆周的圆心的两侧的两个机械手220的结构、工作原理基本相同,不同的是,机械手220的前后驱动机构230通过固定板2302安装到对应的滑动板2804的顶端,从而两个滑动板2804可带动两个机械手220沿左右方向进行同步相向或相背离移动。机械手220的第一下料爪2406和第二下料爪2408呈上下相对设置,且第一下料爪2406位于第二下料爪2408的上方。在实际应用时,也是通过第一下料爪2406伸入到卷针的对应的凹位内,使第一下料爪2406位于电芯的内侧,此时第二下料爪2408位于电芯的外侧,然后下料爪气缸2404驱动第二下料爪2408朝靠近第一下料爪2406的方向移动以实现将电芯夹持。
39.进一步地,如图1所示,底框架2102的前侧安装有两个第二安装架2107,第二安装架2107为一立柱结构并沿及机架210的轴向延伸。两个第二安装架2107分别靠近底框架2102的两端。电芯抓取机构还包括两个上下驱动机构330和用于放置电芯的托盘320,两个上下驱动机构330分别安装到两个第二安装架2107的相背离的一侧,托盘320的两端分别安装到两个上下驱动机构330并位于机架210的内侧,两个上下驱动机构330可驱动托盘320沿上下方向移动。在实际应用时,托盘320位于卷针机构的卷针的正下方(图1中托盘320的位置,展示的是机械手220将电芯400放置到托盘320后的情景)。当六个机械手220夹持到电芯后可将电芯放置到托盘320,以方便人工取料。
40.进一步地,如图1所示,基板2106的与六个机械手220所在圆周的圆心对应的位置处安装有支撑件340,支撑件340的支撑端朝靠近机架210前侧的方向延伸,在实际应用时,支撑件340的支撑端与卷针机构的卷针组件相配合,以实现支撑卷针机构。
41.本实用新型的工作原理为:当电芯在卷针机构的圆形卷针上卷绕成型并进行贴胶工序后,每个机械手220通过其前后驱动机构230驱动下料爪机构240向前移动,即朝机架210的前侧移动,直到下料爪机构240的第一下料爪2406伸入到卷针机构的卷针的对应的凹
位内,接着下料爪机构240的下料爪气缸2404驱动第二下料爪2408朝靠近第一下料爪2406的方向移动,直到电芯被第一下料爪2406和第二下料爪2408夹持,如此,电芯即被六个机械手220的下料爪机构240同时夹持,通过六个机械手220可充分的固定住圆环状电芯。
42.当卷针机构的卷针从机架210的前侧移出后,即退针,位于六个机械手220所在圆周的圆心的两侧的两个机械手220在两个第一横向驱动机构260的驱动下进行同步相背离移动到两者相隔最大距离的位置,与此同时,位于六个机械手220所在圆周的圆心的上方的两个机械手220在第二横向驱动机构270的驱动下进行同步相背离移动到两者相隔最大距离的位置、在第一竖向驱动机构290的驱动下向下移动到与位于六个机械手220所在圆周的圆心的两侧的两个机械手220相对应的位置,位于六个机械手220所在圆周的圆心的下方的两个机械手220在第三横向驱动机构280的驱动下进行同步相向移动到两者相隔最小距离的位置、在第二竖向驱动机构310的驱动下向上移动到与位于六个机械手220所在圆周的圆心的两侧的两个机械手220相对应的位置,在此运动过程中,通过六个机械手220的带动,电芯由圆环状变为扁平环状。
43.接着通过两个上下驱动机构330驱动托盘320向上移动到能够托住电芯的位置,如图1所示的位置,此时六个机械手220的下料爪气缸2404驱动第二下料爪2408朝远离第一下料爪2406的方向移动以松开电芯,然后六个机械手220的前后驱动机构230驱动下料爪机构240向后移动(即朝机架210的后侧移动)以远离电芯,此时六个机械手220脱离电芯,电芯即被放置到托盘320上了(如图1所示的扁平环状电芯400)。
44.上述步骤中,在六个机械手220夹持到电芯后,位于六个机械手220所在圆周的圆心的上方的两个机械手220在进行同步相背离移动的过程中、位于六个机械手220所在圆周的圆心的下方的两个机械手220在进行同步相向移动的过程中都会与电芯发生相对滑动,由于机械手220的第一下料爪2406的第一套件2406b、第二下料爪2408的第二套件2408b的截面形状均呈圆状,可保证不会损坏电芯。
45.以上是对本实用新型的较佳实施进行了具体说明,但本实用新型创造并不限于所述实施例,熟悉本领域的技术人员在不违背本实用新型精神的前提下还可做出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1