一种机械夹爪的制作方法
1.本技术涉及机械搬运装置技术领域,具体是一种机械夹爪。
背景技术:
2.需要说明的是,本部分所记载的内容并不代表都是现有技术。
3.在生产制造领域,工件的搬运夹持固定是较为基础常见的场景,机械夹爪、吸盘为与机械臂连接,对工件搬运的常用设备,但是对于一些表面不平整板材状工件、易被吸破损的高精密物品、装有多个零件的托盘不适合用真空吸盘吸附,而一些机械夹爪偏向于抓取柱状物,而缺少专门很好对板材状工件物品稳定抓取的机械夹爪。
技术实现要素:
4.本实用新型主要针对以上问题,提出了一种机械夹爪,旨在对于板材状工件的夹持装置进行优化,对于一些不能用吸盘吸附的工件应用场景进行了填补缺憾。
5.为实现上述目的,本实用新型提供了一种机械夹爪,包括:安装板、安装于所述安装板的第一夹持部;
6.所述第一夹持部包括固定夹爪、可移夹爪、驱动所述可移夹爪相对所述固定夹爪移动的驱动机构;
7.所述固定夹爪、可移夹爪均包括用于夹持工件的夹头,所述夹头结构大致为两头凸起,中间内凹的工字形圆柱体。
8.进一步地,所述驱动机构包括关节电机,滑轨、与滑轨滑动连接的滑座;所述滑轨、关节电机安装于所述安装板,所述可移夹爪与所述滑座连接,所述关节电机驱动所述可移夹爪沿所述滑轨移动。
9.进一步地,包括安装于所述安装板的第二夹持部;所述安装板包括分别设于两端的第一安装部、第二安装部;所述第一夹持部、第二夹持部分别与所述第一安装部、第二安装部连接装配。
10.进一步地,所述安装板包括减重槽。
11.进一步地,所述安装板包括用于与机械臂连接的第三安装部。
12.进一步地,所述夹头的两端凸起与中间内凹为圆弧过渡。
13.进一步地,所述固定夹爪、可移夹爪位于所述安装板同端面,所述固定夹爪上的所述夹头与所述可移夹爪上的所述夹头之间为夹持区。
14.进一步地,设于所述安装板两端的第一安装部、第二安装部夹角为15度~180度。
15.进一步地,所述安装板材料为碳纤维。
16.进一步地,所述安装板材料为钢铁或铝合金。
17.与现有技术相比,本实用新型提供的一种机械夹爪,能够在对于一些不能用吸盘吸附的工件应用场景进行了填补缺憾,且如果突然发生停电,工件依旧可以停留在夹头的限制中不掉落,既防止工件掉落伤人,又保护了工件的完整安全,具有实用性,值得推广使
用。
附图说明
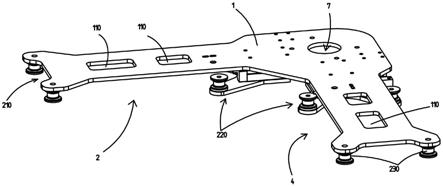
18.图1为本技术一种机械夹爪结构示意图。
19.图2为本技术一种机械夹爪仰视图。
20.图3为本技术一种机械夹爪俯视图。
21.图4为本技术一种机械夹爪俯视图。
22.图5为本技术一种机械夹爪仰视图。
23.图6为本技术一种机械夹爪侧视图。
24.图7为本技术一种机械夹爪的夹头侧视图。
25.图8为本技术一种机械夹爪结构示意图。
26.图9为图8局部放大图。
27.图中所示的附图标记:1、安装板;110、减重槽;2、第一夹持部;210、固定夹爪;220、可移夹爪;230、夹头;3、驱动机构;310、关节电机;320、滑轨;330、滑座;4、第二夹持部;5、第一安装部;6、第二安装部;7、第三安装部;b、凸起;c、内凹;h、圆弧;z、夹持区;j、夹角。
具体实施方式
28.下面将结合附图对本发明进行详细说明,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
30.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
31.请参照图1
‑
图9,本实施例提供了一种机械夹爪,包括安装板1、安装于安装板1的第一夹持部2;第一夹持部2包括固定夹爪210、可移夹爪220、驱动可移夹爪220相对固定夹爪210移动的驱动机构3;固定夹爪210、可移夹爪220均包括用于夹持工件的夹头230,夹头230结构大致为两头凸起b,中间内凹c的工字形圆柱体。
32.在生产制造领域,工件的搬运夹持固定是较为基础常见的场景,机械夹爪、吸盘为与机械臂连接,对工件搬运的常用设备,但是对于一些表面不平整板材状工件、易被吸破损的高精密物品、装有多个零件的托盘不适合用真空吸盘吸附,而一些机械夹爪偏向于抓取柱状物,而缺少专门很好对板材状工件物品稳定抓取的机械夹爪。
33.本机械夹爪针对上述痛点进行解决:对板材状物品夹取时,机械臂带动安装板1上
的第一夹持部2的固定夹爪210、可移夹爪220移动到物品轮廓上方,驱动机构3驱动可移夹爪220移动,使可移夹爪220上的夹头230的距离与固定夹爪210上的夹头230距离大于被夹持物大小,安装板1下行,使夹头230的中间内凹c部位与被夹物齐平,此时控制驱动机构3驱动可移夹爪220移动,缩短可移夹爪220与固定夹爪210的间距,直至被夹物的轮廓进入到夹头230的中间内凹c,夹头230的两头凸起b限制被夹物的上下表面,防止被夹物上下窜动,此时完成对物品的稳定夹持。驱动机构3可以为可以为电机齿轮组、气缸、液压缸任一种来驱动可移夹爪220移动。
34.优选的,根据被夹物厚度的不同,选用具有不同间距两头凸起b的夹头230。夹头230的数量为4个,在固定夹爪210上设置两2个,在可移夹爪220上设置两2个,可根据需要设置多个夹头230,夹头230数量越多,对被夹物品的外边框夹持效果越好。在一些实施例中,夹头230结构大致为一头具有凸边的圆柱体,其横截面大致为t字形。利用凸边对被加持物品进行限制。
35.本机械夹爪对于板材状工件的夹持进行优化,对于一些不能用吸盘吸附的工件应用场景进行了填补缺憾,且如果突然发生停电,工件依旧可以停留在夹头230的限制中不掉落,既防止工件掉落伤人,又保护了工件的完整安全,具有实用性,值得推广使用。
36.请参照图8和图9,驱动机构3包括关节电机310,滑轨320、与滑轨320滑动连接的滑座330;滑轨320、关节电机310安装于安装板1,可移夹爪220与滑座330连接,关节电机310驱动可移夹爪220沿滑轨320移动。当可移夹爪220需要移动时,关节电机310推动可移夹爪220,由于滑轨320与滑座330的引导,以及降低摩擦力,使得可移夹爪220的位移平稳顺滑,运行精准精密。
37.请参照图1和图3,包括安装于安装板1的第二夹持部4;安装板1包括分别设于两端的第一安装部5、第二安装部6;第一夹持部2、第二夹持部4分别与所述第一安装部5、第二安装部6连接装配。通过在安装板1上设置第一安装部5、第二安装部6,其上分别连接装配第一夹持部2、第二夹持部4,进而使本机械夹爪使用时一次夹取两个工件,提升生产效率,实用性强。在一些实施例中,安装板1在两端还可以设置多个安装部以及安装在安装部上的夹持部,形成多工位装夹,进一步提升抓取物品数量。
38.请参照图2和图5,安装板1包括减重槽110。通过在安装板1上设计减重槽110,在不影响安装板1结构强度的前提下,使本机械夹爪整体更为轻便,减轻负重,节省驱动能源,更加环保。
39.请参照图1和图4,安装板1包括用于与机械臂连接的第三安装部7。通过第三安装部7将本机械夹爪安装在机械臂上进行工作。优选的,第三安装部7优选的设置在第一安装部5与第二安装部6中间,夹持物品时保证两端平衡。
40.请参照图6和图7,夹头230的两端凸起b与中间内凹c为圆弧h过渡。通过这种将两端凸起b与中间内凹c之间设计为圆弧h过渡,使夹头230在夹取或放松被夹物品时,即使被夹物品与夹头230外壁发生接触刮碰,圆弧h过渡提供了接触缓冲,防止夹伤被夹物品,使被夹物品被固定夹爪210与可移夹爪220顺滑的夹紧。
41.请参照图5和图6,固定夹爪210、可移夹爪位220于安装板1同端面,固定夹爪210上的夹头230与可移夹爪220上的夹头230之间为夹持区z。本机械夹爪的安装板1具有固定夹爪210、可移夹爪位220那个端面朝上或朝下等方位时对物品方便夹取,可移夹爪220相对固
定夹爪210产生距离变化,夹持区z的大小也会产生相应变化,进而使本机械夹爪可以夹取不同大小规格的板状物。
42.优选的,设于安装板1两端的第一安装部5、第二安装部6夹角j为15度~180度。根据使用空间大小的不同,被夹持物的距离方位不同,因此在选用本机械夹爪时,可以定制不同夹角j的安装板1,使第一安装部5、第二安装部6安装上夹持部,进行夹持物品。扩大应用范围,满足使用需求。
43.优选的,安装板1材料为碳纤维。碳纤维作为一种优秀的高强度、低重量材料,应用在本机械夹爪上,提升使用体验。
44.优选的,安装板1材料为钢铁或铝合金。将安装板1材料选用为钢铁或铝合金便于安装板1的一次性冲压成型,降低加工成本,提升加工效率,而且钢铁或铝合金经济性好,材料性能满足使用需求。
45.本技术实用新型不局限于上述实施方式,只要是说明书中提及的方案均落在本实用新型的保护范围之内。
46.以上应用了具体个例对本实用新型进行阐述,只是用于帮助理解本实用新型,并不用以限制本实用新型。对于本实用新型所属技术领域的技术人员,依据本实用新型的思想,还可以做出若干简单推演、变形或替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1