仿真眼皮驱动装置、眼球仿生机构和仿真机器人的制作方法
1.本公开涉及仿生机器人技术领域,特别是涉及一种仿真眼皮驱动装置、眼球仿生机构和仿真机器人。
背景技术:
2.在现有技术中,眼球的仿生机构有很多种,但是并未发现有关眼皮的仿生机构。
技术实现要素:
3.本公开实施例的目的在于提出一种仿真眼皮驱动装置、眼球仿生机构和仿真机器人来弥补现有技术中仿真眼皮驱动装置缺失的技术问题。为实现上述目的,本公开提供如下技术方案:
4.本公开第一方面的实施例提出一种仿真眼皮驱动装置,包括:安装架;动力机构;套合旋转机构,套合旋转机构包括:眼皮驱动壳和眼轮状万向轴套,其中眼轮状万向轴套固定连接于安装架,眼皮驱动壳为局部空心球型,眼皮驱动壳套设于眼轮状万向轴套,且眼皮驱动壳可相对于眼轮状万向轴套转动;动力传递机构,动力传递机构包括驱动臂和联动杆,驱动臂与动力机构连接,配置为动力机构驱动驱动臂运动,联动杆的一端与驱动臂可转动连接,联动杆的另一端与眼皮驱动壳可转动连接。
5.根据本公开实施例的一种仿真眼皮驱动装置,在眼轮状万向轴套的外面套设一个与其包裹并可绕眼轮状万向轴套转动的眼皮驱动壳,上眼睑的蒙皮可粘贴在眼皮驱动壳上,而下眼睑的蒙皮是直接粘贴在眼轮状万向轴套上,动力机构驱动驱动臂进行运动,从而进一步地驱动与驱动臂连接的联动杆进行运动,最终驱动与联动杆连接的眼皮驱动壳进行运动,通过动力机构对眼皮驱动壳的旋转角度进行精确控制,在眼皮驱动壳上下旋转时,就能带动上眼睑蒙皮开启或闭合,从外部效果上看就像人的眼睛的睁开和闭合,从而实现对眼皮的仿真,弥补现有技术中仿真眼皮驱动装置缺失的问题。
6.另外,根据本公开实施例的一种,还可以具有以下附加的技术特征:
7.在本公开的一些实施例中,所述眼皮驱动壳的左右两端均设置有旋转孔,且所述眼轮状万向轴套的左右两端设置有与所述旋转孔相适配的旋转轴,所述旋转轴套设于所述旋转孔上,所述眼皮驱动壳可绕所述旋转轴转动。
8.在本公开的一些实施例中,所述动力机构包括舵机和舵机固定架,所述舵机固定安装于所述舵机固定架,所述舵机固定架固定安装于所述安装架,所述舵机设置有舵机轴,所述舵机轴上设置有第一螺丝孔,所述驱动臂的一端设置有第三轴孔,螺丝穿过所述第三轴孔连接于所述第一螺丝孔。
9.在本公开的一些实施例中,所述眼皮驱动壳上设置有延长臂,所述延长臂远离所述眼皮驱动壳的一端设置有第一轴孔,所述联动杆的一端设置有与所述第一轴孔相适配的第二轴孔,螺丝穿过所述第一轴孔和所述第二轴孔将所述延长臂与所述联动杆连接在一起,且连接后的所述延长臂与所述联动杆可相对转动。
10.在本公开的一些实施例中,所述舵机轴的外侧设置有第一齿纹,所述驱动臂的一端设置有台阶孔且所述台阶孔与所述第三轴孔的轴线相同,所述台阶孔的内侧壁上设置有与所述第一齿纹相适配的第二齿纹,以防止所述驱动臂与所述舵机轴之间打滑。
11.在本公开的一些实施例中,还包括稳定板,所述稳定板固定连接于所述安装架,且所述稳定板的中间位置固定于所述舵机固定架。
12.在本公开的一些实施例中,所述眼皮驱动壳为韧性材料。
13.在本公开的一些实施例中,还包括仿真眼球摄像机,所述眼轮状万向轴套的中间位置开设有眼轮形状的通孔,所述仿真眼球摄像机安装在所述眼轮状万向轴套的内部,且所述仿真眼球摄像机可透过所述眼轮形状的通孔进行摄制工作。
14.本公开第二方面的实施例提出一种眼球仿生机构,包括如上述公开实施例提出的任一项仿真眼皮驱动装置。
15.本公开第三方面的实施例提出一种仿真机器人,包括如上述公开实施例提出的任一项仿真眼皮驱动装置。
附图说明
16.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本公开的限制。在整个附图中,用相同的附图标记表示相同的部件。在附图中:
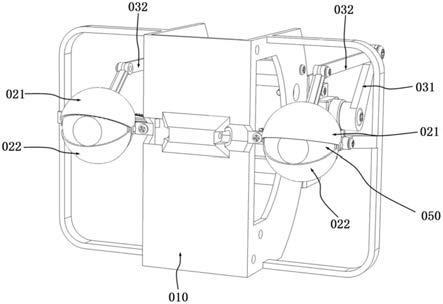
17.图1为本公开实施例仿真眼皮驱动装置的右前视角的结构示意图;
18.图2为本公开实施例仿真眼皮驱动装置的左后视角的结构示意图;
19.图3为本公开实施例仿真眼皮驱动装置的组装示意图;
20.图4为本公开实施例仿真眼皮驱动装置的安装架的左后视角的结构示意图;
21.图5为本公开实施例仿真眼皮驱动装置的安装架的右前视角的结构示意图;
22.图6为本公开实施例仿真眼皮驱动装置的眼皮驱动壳的结构示意图;
23.图7为本公开实施例仿真眼皮驱动装置的眼轮状万向轴套的结构示意图;
24.图8为本公开实施例仿真眼皮驱动装置的驱动臂的结构示意图;
25.图9为本公开实施例仿真眼皮驱动装置的联动杆的结构示意图;
26.图10为本公开实施例仿真眼皮驱动装置的稳定板的结构示意图;
27.图11为本公开实施例仿真眼皮驱动装置的舵机固定架的结构示意图;
28.图12为本公开实施例仿真眼皮驱动装置的舵机的结构示意图;
29.图13为本公开实施例仿真眼皮驱动装置的侧视图。
30.附图中各标记表示如下:
31.010—安装架;011—舵机固定架;012—稳定板;013—外侧挂耳;
32.014—第一通孔;015—内侧挂耳;016—第二通孔;017—第二螺丝孔;
33.018—第三螺丝孔;019—第四螺丝孔;021—眼皮驱动壳;
34.022—眼轮状万向轴套;023—眼轮形状的通孔;024—延长臂;
35.025—旋转孔;026—第一轴孔;027—旋转轴;028—内侧耳板;
36.029—外侧耳板;031—驱动臂;032—联动杆;033—台阶孔;
37.034—第二轴孔;035—第三轴孔;036—第四轴孔;037—第五轴孔;
38.041—舵机;042—舵机轴;043—第一螺丝孔;044—第三通孔;
39.045—第五螺丝孔;046—长方形通孔;047—第四通孔;
40.050—仿真眼球摄像机。
具体实施方式
41.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的实施例。
42.为了便于描述,可以在文中使用空间相对关系术语来描述如图中示出的一个元件或者特征相对于另一元件或者特征的关系,这些相对关系术语例如为“内部”、“外部”、“内侧”、“外侧”、“下面”、“下方”、“上面”、“上方”等。这种空间相对关系术语意于包括除图中描绘的方位之外的在使用或者操作中装置的不同方位。
43.下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本公开一部分实施例,而不是全部的实施例。基于本公开中的实施例,本领域普通技术人员基于本技术所获得的所有其他实施例,都属于本公开保护的范围。
44.如图1至图13所示,本公开第一方面的实施例提出一种仿真眼皮驱动装置,包括:安装架010;动力机构;套合旋转机构,套合旋转机构包括:眼皮驱动壳021和眼轮状万向轴套022,其中眼轮状万向轴套022固定连接于安装架010,眼皮驱动壳021为局部空心球型,眼皮驱动壳021套设于眼轮状万向轴套022,且眼皮驱动壳021可相对于眼轮状万向轴套022转动;动力传递机构,动力传递机构包括驱动臂031和联动杆032,驱动臂031与动力机构连接,配置为动力机构驱动驱动臂031运动,联动杆032的一端与驱动臂031可转动连接,联动杆032的另一端与眼皮驱动壳021可转动连接。
45.根据本公开实施例的一种仿真眼皮驱动装置,在眼轮状万向轴套022的外面套设一个与其包裹并可绕眼轮状万向轴套022转动的眼皮驱动壳021,上眼睑的蒙皮可粘贴在眼皮驱动壳021上,而下眼睑的蒙皮是直接粘贴在眼轮状万向轴套022上,动力机构驱动驱动臂031进行运动,从而进一步地驱动与驱动臂031连接的联动杆032进行运动,最终驱动与联动杆032连接的眼皮驱动壳 021进行运动,通过动力机构对眼皮驱动壳021的旋转角度进行精确控制,在眼皮驱动壳021上下旋转时,就能带动上眼睑蒙皮开启或闭合,从外部效果上看就像人的眼睛的睁开和闭合,从而实现对眼皮的仿真,弥补现有技术中仿真眼皮驱动装置缺失的问题。
46.在本公开的一些实施例中,眼皮驱动壳021的左右两端均设置有旋转孔 025,且所述眼轮状万向轴套022的左右两端设置有与旋转孔025相适配的旋转轴027,旋转轴027套设于旋转孔025上,眼皮驱动壳021可绕所述旋转轴 027转动,在本实施例中,眼皮驱动壳021上设置有旋转孔025,眼轮状万向轴套022上设置有旋转轴027,眼皮驱动壳021套设在眼轮状万向轴套022以后,可以绕着该旋转轴027旋转。
47.在本公开的一些实施例中,动力机构包括舵机041和舵机固定架011,舵机041固定安装于舵机固定架011,舵机固定架011固定安装于安装架010,舵机041设置有舵机轴042,
舵机轴042上设置有第一螺丝孔043,驱动臂031 的一端设置有第三轴孔035,螺丝穿过第三轴孔035连接于第一螺丝孔043,如图2、图3、图11和图12所示,在本公开实施例中,动力机构为舵机041,也称为微型舵机,该舵机041固定安装于舵机固定架011,舵机固定架011固定安装于安装架010,在舵机041上设置有舵机轴042,舵机轴042上设置有第一螺丝孔043,将螺丝穿过第三轴孔035连接于舵机轴042的第一螺丝孔043 上,此时通过舵机轴042的旋转角度就可以控制驱动臂031的旋转角度,进而最终控制眼皮驱动壳021的旋转角度。
48.在本公开的一些实施例中,眼皮驱动壳021上设置有延长臂024,延长臂 024远离眼皮驱动壳021的一端设置有第一轴孔026,联动杆032的一端设置有与第一轴孔026相适配的第二轴孔034,螺丝穿过第一轴孔026和第二轴孔 034将延长臂024与联动杆032连接在一起,且连接后的延长臂024与联动杆 032可相对转动,示例性的,如图6和图9所示,在眼皮驱动壳021上设置有延长臂024,该延长臂024上设置有与联动杆032连接的第一轴孔026,螺丝穿过延长臂024上的第一轴孔026与联动杆032的第二轴孔034将延长臂024 和联动杆032连接起来,且连接后的延长臂024与联动杆032可相对转动,由于此时的联动杆032不是直接与眼皮驱动壳021相连,而是通过与眼皮驱动壳 021上的延长臂024连接,通过设计延长臂024的尺寸,如图13所示,当组装完成该眼皮驱动装置后,此时的延长臂024与驱动臂031平行,驱动臂031旋转的角度与延长臂024旋转的角度一致,这样可以更加精准的控制眼皮驱动壳 021的旋转角度。
49.在本公开的一些实施例中,驱动臂031的一端设置有第四轴孔036,联动杆032的一端设置有第五轴孔037,螺丝穿过第四轴孔036和第五轴孔037将驱动臂031与联动杆032连接在一起,且连接在一起的驱动臂031和联动杆032 可以转动,在本公开实施例中,通过设计第四轴孔036和第五轴孔037将驱动臂031和联动杆032可转动连接在一起,该结构形式简单,安装便捷,极大的简化了动力传递机构的结构。
50.在本公开的一些实施例中,舵机轴042的外侧设置有第一齿纹(图中未示出),驱动臂031的一端设置有台阶孔033且该台阶孔033与第三轴孔035的轴线相同,台阶孔033的内侧壁上设置有与第一齿纹相适配的第二齿纹(图中未示出),以防止驱动臂031与舵机轴042之间打滑,通过在舵机轴042的外侧设置第一齿纹,在驱动臂031的一端设置与第一齿纹相适配的第二齿纹,当把驱动臂031连接在该舵机041上后,可以防止驱动臂031与舵机轴042之间打滑。
51.在本公开的一些实施例中,仿真眼皮驱动装置还包括稳定板012,稳定板 012固定连接于安装架010,且稳定板012的中间位置固定于舵机固定架011,在本公开实施例中,将稳定板012的两个侧边分别固定于安装架010上,并将稳定板012的中间位置固定于舵机固定架011,在仿真眼皮驱动装置工作运行的时候,可以大大减小舵机041在工作时振动的幅度,使整个仿真眼皮驱动装置更加稳固。
52.在本公开的一些实施例中,在安装架010上设置有内侧挂耳015和外侧挂耳013,在内侧挂耳015和外侧挂耳013上设置有第一通孔014,眼轮状万向轴套022上设置有与所述内侧挂耳015和外侧挂耳013相适配的内侧耳板028 和外侧耳板029,在内侧耳板028和外侧耳板029上均设置有第四螺丝孔019,螺丝穿过第一通孔014连接在第四螺丝孔019上,将眼轮状万向轴套022固定在安装架010上。
53.在本公开的一些实施例中,稳定板012的左右两侧均设置有第二螺丝孔 017,安装
架010上设置有第二通孔016,螺丝穿过第二通孔016连接于第二螺丝孔017,将稳定板012固定在安装架010上。稳定板012的中间位置设置有第三螺丝孔018,舵机固定架011上设置有与第三螺丝孔018相适配的第三通孔044,螺丝穿过第三通孔044连接于第三螺丝孔018上,将稳定板012与舵机固定架011固定连接在一起,在舵机固定架011的左右两侧上均设置有可让舵机041通过的长方形通孔046,在这两个长方形通孔046的上下两侧均设置有第五螺丝孔045,在舵机041上设置有第四通孔047,螺丝穿过第四通孔047 连接于第五螺丝孔045,将舵机041固定在舵机固定架011上。
54.在本公开的一些实施例中,眼皮驱动壳021为韧性材料,通过将眼皮驱动壳021设置为韧性材料,可以将眼皮驱动壳021更加容易的套设在眼轮状万向轴套022上。
55.在本公开的一些实施例中,仿真眼皮驱动装置还包括仿真眼球摄像机050,眼轮状万向轴套022的中间位置开设有眼轮形状的通孔023,仿真眼球摄像机 050安装在眼轮状万向轴套022的内部,且仿真眼球摄像机050可透过眼轮形状的通孔023进行摄制工作,在本公开实施例中,在眼轮状万向轴套022的中间位置开设眼轮形状的通孔023,仿真眼球摄像机050安装在眼轮状万向轴套 022的内部,该仿真眼球摄像机050可以透过眼轮形状的通孔023来对外界环境进行摄制等工作。
56.本公开第二方面的实施例提出一种眼球仿生机构,包括如上述公开实施例提出的任一项仿真眼皮驱动装置,本公开实施例中的任一项仿真眼皮驱动装置具有相对独立的装配结构设计,可以作为眼球仿生机构的独立模组进行选装使用,也意味着,本公开的上述任一实施例中的仿真眼皮驱动装置可以安装到任一眼球仿生机构中。
57.本公开第三方面的实施例提出一种仿真机器人,包括如上述公开实施例提出的任一项仿真眼皮驱动装置,上述公开实施例提出的任一项仿真眼皮驱动装置可以用于驱动仿真机器人的上眼睑蒙皮,可以更加逼真的模拟眼皮的动作,同时配合人脸的面部动作来反映人的表情变化,也意味着,本公开的上述任一实施例中的仿真眼皮驱动装置可以应用于仿真机器人上。
58.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
59.本公开的各个实施例均采用相关的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
60.以上所述仅为本公开的较佳实施例,并非用于限定本公开的保护范围。凡在本公开的精神和原则之内所作的任何修改、等同替换、改进等,均包含在本公开的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1