一种自动化流水线用机械手的制作方法
1.本技术涉及自动化流水线设备的技术领域,尤其是涉及一种自动化流水线用机械手。
背景技术:
2.自动化流水线是一个统称,包括组装流水线、皮带流水线、链板线、插件线等等,主要通过自动化系统来操作运行,不需要人工操作。
3.然而现有流水线上仍采取人工来对产品进行筛选,工人精力和注意力有限,长时间工作会导致疲劳,对产品的质量把关也会有所下降,导致产品后续的出售效率降低。
技术实现要素:
4.为了改善人工对产品进行筛选,长时间工作会导致疲劳,对产品的质量把关也会有所下降,导致产品后续的出售效率降低的问题,本技术提供一种自动化流水线用机械手。
5.本技术提供一种自动化流水线用机械手,采用如下的技术方案:
6.一种自动化流水线用机械手,包括输送带,所述输送带的上方一侧设置有红外线装置,所述输送带的一侧表面连接有支撑台,所述支撑台的上方安装有抓取机构,所述抓取机构包括位于输送带上方的驱动臂,所述驱动臂的顶部安装有气缸,所述气缸的下方输出端活动连接有活动杆,所述活动杆延伸至驱动臂的内部,所述驱动臂的内部上方连接有限位板,所述活动杆与限位板之间设置有弹性组件,所述活动杆的底部设置有齿槽,所述齿槽的两侧啮合连接有齿轮状结构,与所述齿轮状结构设置呈一体的有抓手。
7.通过采用上述技术方案,在自动化流水线上难免混入一些残次品,为了防止这些残次品流于市场,所以设置了红外线装置进行产品的把关,当红外线装置发现残次品时,将信号传输至云端控制设备上,再通过云端控制设备操控抓取机构将残次品挑出,从流水线上撤回,气缸驱动活动杆进行伸长是,提升活动杆的延展性,抓手在齿轮状结构与齿槽的配合下进行抓取和张开,活动杆伸长时驱使抓手向张开,活动杆收缩时驱使抓手闭合,对残次品进行夹紧,该装置能有效的将流水线上的残次品进行抓取回收,提高产品的质量以及后续出售效率。
8.可选的,所述弹性组件包括连接在限位板下方的弹簧,所述弹簧套接在活动杆上且底部连接有活动板。
9.通过采用上述技术方案,活动杆伸长或收缩时带动活动板进行移动,由于弹簧的作用可防止活动板与限位板之间发生碰撞,延长零件的使用寿命。
10.可选的,所述活动板的两侧连接有滑块,所述驱动臂的两侧内壁中均开设有滑槽,与所述滑块滑动配合。
11.通过采用上述技术方案,在活动板移动过程中,滑块和滑槽起到一定的导向作用,使活动板保持稳定移动。
12.可选的,所述支撑台的上方安装有底座,所述底座与所述驱动臂之间设置有传动
件。
13.通过采用上述技术方案,底座在抓取机构中起到主要支撑的作用,使抓取机构在运行中保持稳定,通过传动件可提高抓取机构的灵活性。
14.可选的,所述传动件包括转动连接在底座上方的立柱,所述立柱的上方设置有第一连接座,所述第一连接座上活动连接有驱动杆。
15.通过采用上述技术方案,立柱可在底座上进行转动,带动驱动臂实现三百六十度的转动,通过与第一连接座和驱动杆的连接可实现驱动臂抬起或者下降,带动抓手进行抓取。
16.可选的,所述驱动臂的内侧设置有第二连接座,所述第二连接座与驱动杆之间活动连接。
17.通过采用上述技术方案,第二连接座与驱动臂设置呈一体,驱动臂通过第二连接座与驱动杆连接,实现角度调节。
18.综上所述,本技术包括以下至少一种有益效果:
19.1.抓手在齿轮状结构与齿槽的配合下进行抓取和张开,活动杆伸长时驱使抓手向张开,活动杆收缩时驱使抓手闭合,对残次品进行夹紧,该装置能有效的将流水线上的残次品进行抓取回收,提高产品的质量以及后续出售效率;
20.2.立柱可在底座上进行转动,带动驱动臂实现三百六十度的转动,通过与第一连接座和驱动杆的连接可实现驱动臂抬起或者下降,第二连接座与驱动杆之间活动连接,驱动臂通过第二连接座与驱动杆连接,实现角度调节。
附图说明
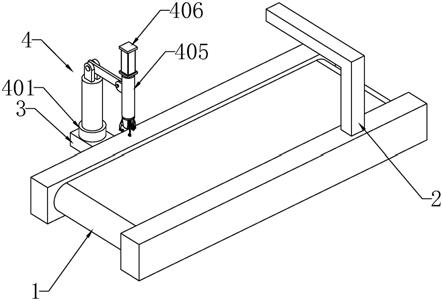
21.图1是本实施例的整体结构立体示意图;
22.图2是本实施例的机械臂内部结构示意图;
23.图3是本实施例的图2中a处结构放大示意图;
24.图4是本实施例的抓取机构整体结构示意图。
25.附图标记说明:1、输送带;2、红外线装置;3、支撑台;4、抓取机构;401、底座;402、立柱;403、第一连接座;404、驱动杆;405、驱动臂;406、气缸;407、活动杆;408、限位板;409、弹簧;410、活动板;411、齿槽;412、抓手;413、齿轮状结构;414、滑块;415、滑槽;416、第二连接座。
具体实施方式
26.以下结合附图1-4对本技术作进一步详细说明。
27.实施例:
28.本技术实施例公开一种自动化流水线用机械手。参照图1和图2,包括输送带1,输送带1的上方一侧设置有红外线装置2,输送带1的一侧表面连接有支撑台3,支撑台3的上方安装有抓取机构4,在自动化流水线上难免混入一些残次品,为了防止这些残次品流于市场,所以设置了红外线装置2进行产品的把关,当红外线装置2发现残次品时,将信号传输至云端控制设备上,再通过云端控制设备操控抓取机构4将残次品挑出,从流水线上撤回,提高生产质量以及效率,抓取机构4包括位于输送带1上方的驱动臂405,驱动臂405的顶部安
装有气缸406,气缸406的下方输出端活动连接有活动杆407,气缸406驱动活动杆407进行伸长时,提升活动杆407的延展性,活动杆407延伸至驱动臂405的内部,驱动臂405的内部上方连接有限位板408,限位板408的作用下可防止结构超出运动范围,活动杆407与限位板408之间设置有弹性组件,通过弹性组件可承受活动杆407收缩时带来的压缩载荷,活动杆407的底部设置有齿槽411,齿槽411的两侧啮合连接有齿轮状结构413,与齿轮状结构413设置呈一体的有抓手412,抓手412对称设置有两组,并且两组抓手412均通过齿轮状结构413啮合在活动杆407下方的齿槽411中,两组抓手412在活动杆407上下运动时实现抓取和张开,活动杆407伸长时驱使抓手412向张开,活动杆407收缩时驱使抓手412闭合,对残次品进行夹紧,该装置能有效的将流水线上的残次品进行抓取回收,提高产品的质量以及后续出售效率。
29.参照图2,弹性组件包括连接在限位板408下方的弹簧409,弹簧409套接在活动杆407上且底部连接有活动板410,活动杆407伸长或收缩时带动活动板410进行移动,由于弹簧409的作用可防止活动板410与限位板408之间发生碰撞,延长零件的使用寿命。
30.参照图3,活动板410的两侧连接有滑块414,驱动臂405的两侧内壁中均开设有滑槽415,与滑块414滑动配合,在活动板410移动过程中,滑块414和滑槽415起到一定的导向作用,使活动板410保持稳定移动。
31.参照图4,支撑台3的上方安装有底座401,底座401在抓取机构4中起到主要支撑的作用,使抓取机构4在运行中保持稳定,底座401与驱动臂405之间设置有传动件,通过传动件可提高抓取机构4的灵活性。
32.传动件包括转动连接在底座401上方的立柱402,支撑台3的底部安装有电机(图中未示出),电机的输出端穿过支撑台3与底座401与立柱402连接,以此驱动立柱402可在底座401上进行转动,带动驱动臂405实现三百六十度的转动,立柱402的上方设置有第一连接座403,第一连接座403上活动连接有驱动杆404,通过与第一连接座403和驱动杆404的连接,通过编程以及内部运动机构实现带动驱动臂405抬起或者下降,带动抓手412进行抓取。
33.参照图4,驱动臂405的内侧设置有第二连接座416,第二连接座416与驱动臂405设置呈一体,第二连接座416与驱动杆404之间活动连接,驱动臂405通过第二连接座416与驱动杆404连接,输入程序和未示出的伺服电机来实现角度调节。
34.本技术实施例的一种自动化流水线用机械手的实施原理为:
35.当产品在输送带1上进行输送时,红外线装置2进行产品的把关,当红外线装置2发现残次品时,将信号传输至云端控制设备上,再通过云端控制设备操控抓取机构4,通过与第一连接座403和驱动杆404的连接可实现驱动臂405抬起或者下降,第二连接座416与驱动杆404连接,实现驱动臂405的角度调节,气缸416启动,驱动活动杆407伸长,在齿轮状结构413与齿槽411的配合下进行张开,通过抓手412将残次品抓住,活动杆407收缩时驱使抓手412闭合,对残次品进行夹紧,立柱402可在底座401上进行转动,带动驱动臂405实现三百六十度的转动,将残次品回收,该装置能有效的将流水线上的残次品进行抓取回收,提高产品的质量以及后续出售效率。
36.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1