轨道智能激光清洗机器人的制作方法
1.本实用新型属于智能机器人技术领域,涉及一种轨道智能激光清洗机器人。
背景技术:
2.由于铁轨的特殊使用环境,轨腰常年经日晒雨淋产生锈蚀,这对轨腰标识作业有一定的影响,轨道标识作业使用的是经过改良后的油漆,轨腰的锈蚀对油漆的附着力和寿命有着明显的破坏作用。所以,要求在轨道标识作业时须对轨腰的锈蚀进行清除,以增强油漆的附着力和使用寿命。传统的锈蚀清除使用抹布、钢丝刷或者电动磨光机进行清除。由于铁轨有大量的道钉且铁轨离地面的距离很近,这给传统的锈蚀清除工作带来了巨大的工作量,且由于铁轨关系到人民生命安全,轨道作业不允许利用任何化学反应来清除轨腰锈蚀。轨道智能激光清洗机器人在此背景下研发问世。
技术实现要素:
3.本实用新型的目的在于,克服现有技术的不足,提供一种能提高轨腰锈蚀清洗效率及清洗效果且对轨道无任何化学伤害的轨道智能激光清洗机器人。
4.本实用新型的目的是通过以下技术方案实现的:
5.本实用新型一种轨道智能激光清洗机器人,主要包括自动行走平台、电机驱动单元、电器控制盒、激光控制盒、电池、自动伸缩机构、自动平行机构、激光清洗头和激光器;自动行走平台位于机器底部,包括车架、行走电机和至少两个行走轮,能在轨道上行走;电机驱动单元、电池、自动伸缩机构、电器控制盒和激光器均固定安装在自动行走平台的车架上;在电器控制盒内设有微控制器;电机驱动单元与电器控制盒内的微控制器的输出端连接(微控制器的输入端可与轨道标识数据采集模块连接);电机驱动单元与自动行走平台的行走电机连接,能够驱动自动行走平台行走;电机驱动单元还与自动伸缩机构的步进电机连接,能够驱动自动伸缩机构的步进电机转动,实现自动伸缩;激光控制盒与激光器连接;激光器与激光清洗头电连接;电机驱动单元、激光控制盒、电器控制盒、激光清洗头、激光器均与电池连接;激光清洗头通过自动平行机构与自动伸缩机构连接;自动伸缩机构能驱动激光清洗头在工作位和收起位的自动收放;自动平行机构能使激光清洗头在收放时始终保持与轨道平行(使激光清洗头的激光发射方向始终保持与轨道轨腰垂直)。
6.进一步地,自动伸缩机构主要包括同步带轮、步进电机、丝杆、导轨、安装支座、铰链、滑块、旋转轴和激光头连接杆;安装支座包括连在一起的上支座和下支座;上支座包括底板和前后两侧的固定竖板;丝杆两端分别安装在前后两侧的固定竖板上;同步带轮安装在丝杆一端,同步带轮通过传动带与步进电机的输出轴连接;上支座的底板上面设有导轨;上支座的底板靠前部左右两侧有左右两块耳板;旋转轴两端通过轴承横向安装在左右两块耳板上;下支座的截面呈倒t形;左右两块耳板分别位于下支座上部两侧;步进电机通过同步带轮与丝杆连接;滑块底部置于导轨上,滑块能在导轨上做往复运动;滑块上部套装在丝杆外面(丝杆从滑块上部穿插而过);铰链包括对称设置的左右两个;铰链一端与滑块中部
固定连接;铰链另一端与激光头连接杆后端固定连接。
7.进一步地,激光头连接杆包括对称设置的左右两个l形连接件;左右两个l形连接件之间通过前部的连接筋条连接;每个l形连接件,包括中间的上下两根方杆、后端的弯折板和前端的开有轴孔的圆头;后端的弯折板底部外侧设有与铰链连接的带螺孔的凸出块;上下两根方杆的前端、后端均连在一起;两个平行导轮分别固定安装在激光头连接杆的上面两根方杆的后端上面;两个平行导轮上面顶在上支座的底板下面;旋转轴从左右两个l形连接件的上下两根方杆之间横向穿过;激光头连接杆可在旋转轴上在两个平行导轮的引导下做水平方向的直线运动,当运动到激光头连接杆上下两根方杆的后端相连处抵在旋转轴上时,激光头连接杆开始绕着旋转轴做旋转运动。
8.进一步地,自动平行机构主要包括激光清洗头连接座、转轴、转轴固定板、平衡铰链、自动平衡楔块和平衡从动板;激光清洗头连接座包括激光清洗头支承圆筒和三块依次排列的竖立的激光清洗头连接板、转轴固定前板、转轴固定后板;转轴固定前板与转轴固定后板相对设置,两者之间通过连接板连接;激光清洗头连接板、转轴固定前板中心为圆孔;激光清洗头连接板与转轴固定前板之间通过横向的激光清洗头支承圆筒连接,激光清洗头连接板用于固定激光清洗头前部,激光清洗头支承圆筒、转轴固定前板用于支承激光清洗头中部;转轴固定后板中心设方孔,用于支撑激光清洗头后部;转轴两端分别安装在转轴固定前板、转轴固定后板顶部偏离中心的位置;平衡铰链一端与转轴连接,平衡铰链另一端通过销轴与平衡从动板的向上凸出块连接;平衡从动板两端分别固定安装在转轴固定前板、转轴固定后板的中上部位置;激光头连接杆的前端套装在转轴上;自动平衡楔块固定安装在激光头连接杆的前端圆头的底部,自动平衡楔块顶在平衡从动板上,使激光头连接杆始终保持与平衡从动板呈一定倾斜角度,使激光清洗头始终保持与轨道平行(使激光清洗头的激光发射方向始终保持与轨道轨腰垂直)。
9.进一步地,自动行走平台包括车架、行走电机和和两个行走轮;两个行走轮安装在车架的前后两端,能在单根钢轨上行走。
10.进一步地,所述的轨道智能激光清洗机器人,还包括罩壳安装座和罩壳;罩壳安装座均固定安装在自动行走平台的车架上;罩壳固定安装在罩壳安装座上;罩壳两侧各设有一个拎手,放便携带。
11.进一步地,滑块底部装有滑轮,滑轮置于导轨上。
12.进一步地,铰链与激光头连接杆通过螺丝连接。
13.进一步地,平衡从动板两端分别通过螺丝固定安装在转轴固定前板、转轴固定后板的中上部位置。
14.进一步地,平衡铰链一端套装在转轴上。
15.本实用新型一种轨道智能激光清洗机器人的工作原理是:利用与激光器连接的激光清洗头发出的微米或纳米级波长的高能光纤激光对轨道轨腰放电,实现对轨腰浮锈、油脂水汽及其他粘贴物的清洗。
16.本实用新型的有益效果:
17.本实用新型的轨道智能激光清洗机器人,是一种轨道自动清洗专用设备,其受微控制器控制,能实现对轨道轨腰锈蚀的自动清洗,并可实现与轨道标识作业数据同步的清洗长度的自动清洗。其具有灵活的单轨行走且稳定平衡的功能,可适应不同规格的轨道清
洗作业,不受轨道道钉影响,可根据轨道标识数据采集模块采集到的轨道标识作业数据自动计算所需清洗长度,可根据锈蚀程度灵活调整清洗速度,以达到所需的清洗要求,可灵活选择清洗模式(如单程清洗模式、往复清洗模式)。
18.本实用新型的轨道智能清洗机器人,大大提高了轨腰锈蚀清洗的效率,提高了清洗效果且对轨道无任何化学伤害,节省了大量的人力物力。该设备具有体积小,质量轻,控制简单,适应性强等特点。
附图说明
19.图1是本实用新型一种轨道智能激光清洗机器人在收起位的整体结构示意图;
20.图2是本实用新型一种轨道智能激光清洗机器人在工作位的整体结构示意图;
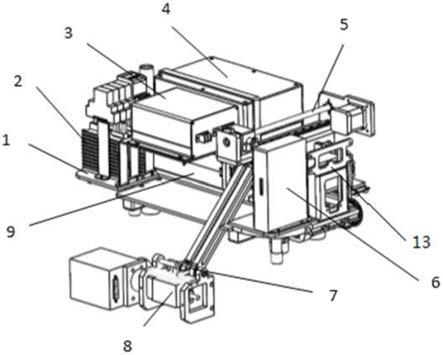
21.图3是本实用新型中的轨道智能激光清洗机器人在工作位的内部结构示意图;
22.图4是本实用新型中的轨道智能激光清洗机器人在收起位、带罩壳的结构示意图;
23.图5是本实用新型中的自动伸缩机构5的主视结构示意图(铰链56、滑块57位于一侧);
24.图6是本实用新型中的自动伸缩机构5的侧视结构示意图;
25.图7是本实用新型中的自动伸缩机构5的主视结构示意图(铰链56、滑块57位于中间);
26.图8是本实用新型中的自动伸缩机构5的侧视结构示意图(图7的a-a剖切图);
27.图9是本实用新型中的激光头连接杆60的立体结构示意图;
28.图10是本实用新型中的激光头连接杆60的俯视结构示意图;
29.图11是本实用新型中的自动平行机构7(未装激光清洗头8)的主视结构示意图;
30.图12是本实用新型中的自动平行机构7装上激光清洗头8的主视结构示意图;
31.图13是本实用新型中的自动平行机构7装上激光清洗头8的侧视结构示意图。
32.图中:1、自动行走平台2、电机驱动单元3、激光控制盒4、电池5、自动伸缩机构6、电器控制盒7、自动平行机构8、激光清洗头9、激光器10、罩壳11.轨道12、拎手13、罩壳安装座51、同步带轮52、步进电机53、丝杆54、导轨55、安装支座56、铰链57、滑块58、旋转轴59、旋转轴组件60、激光头连接杆61、平行导轮62、轴承63、底板64、固定竖板65、固定竖板66、耳板67、上支座68、下支座69、连接筋条600、轴孔601、圆头602、方杆603、弯折板604、螺孔605、凸出块70、激光清洗头连接板71、转轴固定前板72、转轴73、转轴固定后板74、平衡铰链75、自动平衡楔块76、平衡从动板77、方孔78、激光清洗头支承筒79、连接板80、销轴81、向上凸出块82、激光发射口g、重力方向
具体实施方式
33.以下结合附图和实施例对本实用新型作进一步的说明。
34.实施例
35.如图1、图2所示,本实用新型一种轨道智能激光清洗机器人,是一款用于铁轨轨腰清除浮锈、油脂、水气及其他粘贴物的自动化专用设备,其利用与激光器9连接的激光清洗头8发出的微米或纳米级波长的高能光纤激光对轨道轨腰放电,实现对轨腰浮锈、油脂水汽及其他粘贴物的清洗。图1、图2分别展示的是激光清洗头8在工作位、激光清洗头8在收起位
两个位置。
36.本实用新型的轨道激光清洗机器人,其结构如下:
37.如图3、图4所示,本实用新型的轨道智能激光清洗机器人主要由自动行走平台1、电机驱动单元2、激光控制盒3、电池4、自动伸缩机构5、电器控制盒6、自动平行机构7、激光清洗头8、激光器9组成;
38.自动行走平台1位于机器底部;自动行走平台1包括车架、行走电机和两个行走轮;两个行走轮安装在车架的前后两端,能在单根钢轨11上行走;两个行走轮与行走电机连接;行走电机与电机驱动单元2连接,使自动行走平台1具有单轨自动行走功能。(本实施例中的前、后、左、右方位以图3中的前、后、左、右方向为准)。
39.电机驱动单元2、电池4、自动伸缩机构5、电器控制盒6和激光器9均固定安装在自动行走平台1的车架上;在电器控制盒6内设有微控制器;电机驱动单元2 与电器控制盒6内的微控制器的输出端连接(微控制器的输入端与轨道标识数据采集模块连接);电机驱动单元2与自动行走平台1的行走电机连接,能够驱动自动行走平台1行走;电机驱动单元2还与自动伸缩机构5的步进电机52连接,能够驱动自动伸缩机构5的步进电机52转动,实现自动伸缩;激光器9安装在自动行走平台 1上的中间位置;激光控制盒3固定安装在激光器9上面,与激光器9电连接;激光器9与激光清洗头8电连接;电机驱动单元2、激光控制盒3、电器控制盒6、激光清洗头8、激光器9均与电池4连接;自动伸缩机构5与自动平行机构7连接;激光清洗头8与自动平行机构7连接。自动伸缩机构5负责激光清洗头8在工作位 (工作位由激光清洗头8的场镜焦距决定)和收起位的自动收放(参见图1、图2)。自动平行机构7在激光清洗头8收放时,利用克服激光清洗头8重力偏心的原理,使激光清洗头8在收放时始终保持与轨道平行,使激光清洗头的激光发射方向始终保持与轨道轨腰垂直。
40.如图3、图2所示,本实用新型的轨道智能激光清洗机器人,还包括罩壳安装座13和罩壳10;罩壳安装座13固定安装在自动行走平台1的车架上;罩壳10固定安装在罩壳安装座13上。罩壳10两侧各设有一个拎手12,放便携带。
41.如图5-图8所示,自动伸缩机构5主要由同步带轮51、步进电机52、丝杆53、导轨54、安装支座55、铰链56、滑块57、旋转轴组件59、激光头连接杆60等组成。旋转轴组件59包括旋转轴58和轴承62;安装支座55包括连在一起的上支座 67和下支座68;上支座67包括底板63和前后两侧的固定竖板64;丝杆53两端分别安装在前后两侧的固定竖板64上;同步带轮51安装在丝杆53一端,同步带轮 51通过传动带与步进电机52的输出轴连接;上支座的底板63上面设有导轨54;上支座的底板63靠前部左右两侧有左右两块耳板66;旋转轴58两端通过轴承62横向安装在左右两块耳板66上;下支座68的截面呈倒t形;左右两块耳板66分别位于下支座68上部两侧;步进电机52通过同步带轮51与丝杆53连接;滑块57底部装有滑轮,滑轮置于导轨54上,滑块57能在导轨54上做往复运动;滑块57上部套装在丝杆53外面(丝杆53从滑块57上部穿插而过);铰链56包括对称设置的左右两个;铰链56一端与滑块57中部固定连接;铰链56另一端与激光头连接杆60 后端固定连接。
42.如图9、图10所示,激光头连接杆60包括对称设置的左右两个l形连接件;左右两个l形连接件之间通过前部的连接筋条69连接;每个l形连接件,包括中间的上下两根方杆602、后端的弯折板603和前端的开有轴孔600的圆头601;后端的弯折板603底部外侧设有与铰链56连接的带螺孔604的凸出块605(铰链56与激光头连接杆60通过螺丝连接);上下两根
方杆602的前端、后端均连在一起;两个平行导轮61分别固定安装在激光头连接杆60的上面两根方杆602的后端上面;如图5-图8所示,两个平行导轮61上面顶在上支座67的底板63的下面;旋转轴58从左右两个l形连接件的上下两根方杆602之间横向穿过(即从上面两根方杆与下面两根方杆之间横向穿过);激光头连接杆60可在旋转轴58上(在旋转轴58的制约下),在两个平行导轮61的引导下,做水平方向的直线运动(从后面运动到前面,即从图7中的位置水平运动到图5中的位置);当运动到激光头连接杆60的上下两根方杆602的后端相连处抵在旋转轴58上时(被旋转轴58抵挡住),激光头连接杆 60开始绕着旋转轴58做旋转运动。
43.自动伸缩机构5的工作原理为:步进电机52通过同步带轮51驱动丝杆53旋转推动滑块57在导轨54上做往复运动,当滑块56带动铰链56推动激光头连接杆60 在两个平行导轮61的引导下做水平方向的直线运动,运动到旋转轴58的约束位置时,在旋转轴58的约束下,激光头连接杆60由水平方向的直线运动改变为以旋转轴58为中心轴的旋转运动,从而实现激光头连接杆60连同自动平行机构7和激光清洗头8的伸缩(收放)。激光头连接杆60通过自动平行机构7与激光清洗头8连接。
44.如图11-图13所示,自动平行机构7主要由激光清洗头连接座、转轴72、转轴固定板、平衡铰链74、自动平衡楔块75及平衡从动板76组成;激光清洗头连接座包括激光清洗头支承圆筒78和三块依次排列的竖立的激光清洗头连接板70、转轴固定前板71、转轴固定后板73;转轴固定前板71与转轴固定后板73相对设置,两者之间通过连接板79连接;激光清洗头连接板70、转轴固定前板71中心为圆孔;激光清洗头连接板70与转轴固定前板71之间通过横向的激光清洗头支承圆筒78连接,激光清洗头连接板70用于固定激光清洗头8前部,激光清洗头支承圆筒78、转轴固定前板71用于支承激光清洗头8中部;转轴固定后板73中心设方孔77,用于支撑激光清洗头8后部;激光清洗头8前部固定在激光清洗头连接板70上,激光清洗头中部穿过支承圆筒78和激光清洗头连接板70、转轴固定前板71的中心圆孔,激光清洗头8后部横穿过激光清洗头连接座71的转轴固定后板73的中心方孔77;转轴72两端分别安装在激光清洗头连接座71的后面两块竖立的板即转轴固定前板 71、转轴固定后板73顶部偏离中心的位置(转轴72的安装位置偏心);平衡铰链 74一端与转轴72连接(平衡铰链74前端套装在转轴72上),平衡铰链74另一端通过销轴80与平衡从动板76的向上凸出块81连接;平衡从动板76两端分别通过螺丝固定安装在激光清洗头连接座71的后面两块竖立的板即转轴固定前板71、转轴固定后板73的中上部位置;激光头连接杆60的前端套装在转轴72上(转轴72 插入激光头连接杆60的前端圆头601的轴孔600中);自动平衡楔块75固定安装在激光头连接杆60的前端圆头601的底部,自动平衡楔块75顶在平衡从动板76上,使激光头连接杆60始终保持与平衡从动板76呈一定倾斜角度,使激光清洗头8始终保持与轨道平行。
45.自动平行机构7的工作原理为:利用转轴72安装位置的偏心,使激光清洗头8 的重心在转轴72的外侧(如图13所示,重力方向g位于转轴72的外侧);当激光头连接杆60连同自动平行机构7和激光清洗头8在自动伸缩机构5的作用下做水平方向的直线运动时,由于转轴72和平衡铰链74是活动的,且由于平衡从动板76连同激光清洗头连接座71和激光清洗头8的重心在下面,所以,通过转轴72和平衡铰链74,可使平衡从动板76连同激光清洗头连接座71和激光清洗头8始终保持在下面的位置,使自动平行机构7在自动伸缩机构5促使激光清洗头8收放时,利用克服激光清洗头8重力偏心的原理,使激光清洗头8始终保持与轨道平
行,使激光清洗头8的激光发射方向始终保持与轨道轨腰垂直(亦即,使图13中激光发射口 82发射出的激光与轨道轨腰垂直)。
46.当激光头连接杆60连同自动平行机构7和激光清洗头8在自动伸缩机构5的作用下做水平方向的直线运动和做旋转运动时,利用自动平衡楔块75的阻挡,使得位于转轴72内侧的激光头连接杆60顶在平衡从动板76上,从而实现激光清洗头8始终保持与轨道平行,使激光清洗头8的激光发射方向始终保持与轨道轨腰垂直。如图13所示,激光清洗头8的重心在转轴72的外侧(重力方向g位于图13中左边),左边的激光清洗头8有向下运动的趋势,右边的平衡从动板76有向上运动的趋势,由于平衡从动板76被自动平衡楔块75顶着,所以,激光清洗头8无法向下运动(即无法旋转),无法旋转,则可以使自动平行机构7在自动伸缩机构5促使激光清洗头 8收放时,利用克服激光清洗头8重力偏心的原理,使激光清洗头8始终保持与轨道平行,使激光清洗头8发出的高能光纤激光始终保持与轨道轨腰垂直。
47.本实用新型的轨道智能激光清洗机器人是一种轨道自动清洗专用设备,其受微控制器控制,能实现对轨道轨腰锈蚀的自动清洗,并可实现与轨道标识作业数据同步的清洗长度的自动清洗。其具有灵活的单轨行走且稳定平衡的功能,可适应不同规格的轨道清洗作业,不受轨道道钉影响,可根据轨道标识数据采集模块采集到的轨道标识作业数据自动计算所需清洗长度,可根据锈蚀程度灵活调整清洗速度以达到所需的清洗要求,可灵活选择清洗模式(如单程清洗模式、往复清洗模式)。
48.本实用新型的轨道智能激光清洗机器人,大大提高了轨腰锈蚀清洗的效率,提高了清洗效果且对轨道无任何化学伤害,节省了大量的人力物力。该设备具有体积小,质量轻,控制简单,适应性强等特点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1