一种适用于搬运大型工件的AGV智能机器人的制作方法
一种适用于搬运大型工件的agv智能机器人
技术领域
1.本实用新型涉及agv智能机器人技术领域,尤其涉及的是一种适用于搬运大型工件的agv智能机器人。
背景技术:
2.automated guided vehicle简称agv,当前最常见的应用如:agv搬运机器人或agv小车,agv搬运机器人可实现在特定的空间及路线内进行搬运及运输,工作效率高,传统技术中,对于大件货物通常使用运货车的方式是实现对于大件货物的搬运,但是对于特定的场合及路线内使用人力操控运货车的方式进行输送将会十分浪费人力资源,并且也会带来一定的风险,十分不便。因此,为了用户在特定工厂内可实现高效率的搬运大型工件的工作,所以有必要设计出一套专门针对适用于搬运大型工件的agv智能机器人。
3.因此,现有技术存在缺陷,需要改进。
技术实现要素:
4.本实用新型所要解决的技术问题是:提供一种工作效率快,安全性高的适用于搬运大型工件的agv智能机器人。
5.本实用新型的技术方案如下:一种适用于搬运大型工件的agv智能机器人,包括机架、移动机构、载物箱、存物架、电磁感应模块、机械臂及驱动模块,所述移动机构设于机架底部,所述载物箱设于机架上的一侧,所述存物架设于机架上的另一侧,所述驱动模块设于设于存物架及载物箱之间的机架上,所述机械臂与驱动模块侧端连接,所述驱动模块顶部设有送料斗,所述电磁感应模块设于机架前侧端;
6.其中,所述机械臂包括工件夹持组件、第一回转机构、第二回转机构、第三回转机构、第一旋转机构及第二旋转机构,所述第一旋转机构设于驱动模块侧端,所述第二回转机构通过第一回转机构与第一旋转机构连接,所述第二旋转机构通过第三回转机构与第二回转机构连接,所述第二旋转机构与工件夹持组件连接。
7.采用上述技术方案,所述的适用于搬运大型工件的agv智能机器人中,所述移动机构包括两组行走轮组、驱动电机及传动链条,两组所述行走轮组分别设于机架的左右两侧,所述驱动电机设于两组行走轮组之间,所述行走轮组的前后两侧分别设有第一链轮,所述驱动电机的输出轴设有第二链轮,所述第二链轮通过传动链条与第一链轮连接。
8.采用上述各个技术方案,所述的适用于搬运大型工件的agv智能机器人中,还包括称重显示模块,所述称重显示模块设于机架侧端。
9.采用上述各个技术方案,所述的适用于搬运大型工件的agv智能机器人中,所述机架左侧端上分别设有测物避障模块,所述测物避障模块与移动机构通过电性连接。
10.采用上述各个技术方案,所述的适用于搬运大型工件的agv智能机器人中,所述机架上还有设有急停键。
11.采用上述各个技术方案,所述的适用于搬运大型工件的agv智能机器人中,所述工
件夹持组件的夹指内侧设有若干防滑凸块。
12.本实用新型与现有技术相比,具有以下有益效果:
13.采用上述各个技术方案,本实用新型适用于搬运大型工件的agv智能机器人中,电磁感应模块的设置,可感应地面已固定的路线设计的电磁感应铜线,使移动机构带动机器人开始进行循迹移动,从而可实现agv智能机器人在固定的路线进行搬运大型工件;驱动模块可驱动机械臂进行位置调节,并通过工件夹持组件将工件进行稳定夹持送至送料斗中,从而实现工件的有序归类,实用性强;物避障模块可辅助机器人在移动的过程中,在受到其它因素的干扰时进行紧急停止避障,防止因为障碍物的影响发生侧翻情况,安全可靠。
附图说明
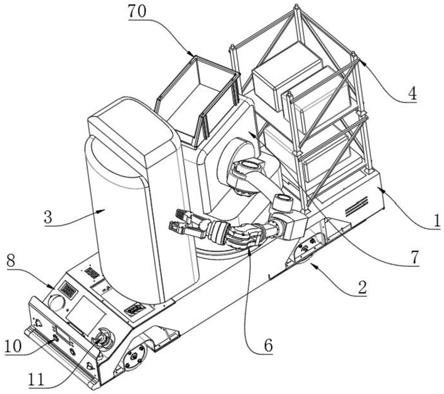
14.图1为本实用新型的整体结构示意图;
15.图2为本实用新型的机械臂结构示意图;
16.图3为本实用新型的移动机构结构示意图。
具体实施方式
17.以下结合附图和具体实施例,对本实用新型进行详细说明。
18.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“里面”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
19.如图1及图3所示,一种适用于搬运大型工件的agv智能机器人,包括机架1、移动机构2、载物箱3、存物架4、电磁感应模块5、机械臂6及驱动模块 7,所述移动机构2设于机架1底部,所述载物箱3设于机架1上的一侧,所述存物架4设于机架1上的另一侧,所述驱动模块7设于设于存物架4及载物箱3 之间的机架1上,所述机械臂6与驱动模块7侧端连接,所述驱动模块7顶部设有送料斗70,所述电磁感应模块5设于机架1前侧端。本实施例中,电磁感应模块5可感应地面预设路线的电磁感应铜线,使移动机构2带动机器人开始进行循迹移动,通过驱动模块7可控制连接的机械臂6进行夹取工件,将工件放置于顶部的送料斗70中,再通过送料斗70将货物分别整齐送至于载物箱3 及存物架4中,从而完成固定路线的工件搬运。
20.如图2所示,所述机械臂6包括工件夹持组件60、第一回转机构61、第二回转机构62、第三回转机构63、第一旋转机构64及第二旋转机构65,所述第一旋转机构64设于驱动模块7侧端,所述第二回转机构62通过第一回转机构 61与第一旋转机构64连接,所述第二旋转机构65通过第三回转机构63与第二回转机构62连接,所述第二旋转机构62与工件夹持组件60连接。本实施例中,第一回转机构61、第二回转机构62及第三回转机构63可分别实现180
°
回转,第一旋转机构64可带动整个机械臂6的旋转,第二旋转机构65可带动工件夹持组件60进行旋转。具体的,驱动模块7可驱动机械臂6进行位置调节,并通过工件夹持组件60将工件稳定夹持送至送料斗70中。
21.如图3所示,作为优选的,所述移动机构2包括两组行走轮组20、驱动电机21及传动
链条(未图示),两组所述行走轮组20分别设于机架1的左右两侧,所述驱动电机21设于两组行走轮组20之间,所述行走轮组20的前后两侧分别设有第一链轮200,所述驱动电机21的输出轴设有第二链轮210,所述第二链轮210通过传动链条与第一链轮200连接。本实施例中,驱动电机21可带动第二链轮210开始运转,第二链轮210可通过传动链条带动第一链轮200运转,第一链轮200可带动两组行走轮组20进行运转,从而实现机器人的位置移动。
22.如图1所示,作为优选的,所述适用于搬运大型工件的agv智能机器人还包括称重显示模块8,所述称重显示模块8设于机架1侧端。
23.如图1所示,作为优选的,所述机架1左侧端上分别设有测物避障模块10,所述测物避障模块10与移动机构2通过电性连接。本实施例中,测物避障模块 10可辅助机器人在移动过程中,在受到其它因素的干扰时进行紧急停止避障,防止因为障碍物的影响发生侧翻情况,安全可靠。
24.如图1所示,作为优选的,所述机架1上还有设有急停键11。
25.如图2所示,作为优选的,所述工件夹持组件60的夹指内侧设有若干防滑凸块600。本实施例中,防滑凸块600的设置,可提高工件夹持组件60对工件的夹持稳定性,防止工件在夹持过程中滑脱。
26.采用上述各个技术方案,本实用新型适用于搬运大型工件的agv智能机器人中,电磁感应模块的设置,可感应地面已固定的路线设计的电磁感应铜线,使移动机构带动机器人开始进行循迹移动,从而可实现agv智能机器人在固定的路线进行搬运大型工件;驱动模块可驱动机械臂进行位置调节,并通过工件夹持组件将工件进行稳定夹持送至送料斗中,从而实现工件的有序归类,实用性强;物避障模块可辅助机器人在移动的过程中,在受到其它因素的干扰时进行紧急停止避障,防止因为障碍物的影响发生侧翻情况,安全可靠。
27.以上仅为本实用新型的较佳实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1