一种直线机器人的制作方法
1.本实用新型涉及直线机器领域,特别涉及一种直线机器人。
背景技术:
2.随着机器人的应用越来越广泛,直线机器人的设计工作日益显得重要。成功的设计一台直线机器人涉及到很多方面的工作,包括机械结构、动力驱动、伺服控制等等。在对精密设备进行检测时,通常需要三轴直线机器人上的相机模块对其进行拍摄,当时,普通的直线机器人只能将相机模块移动至待测物品上方,部分待测物品表面会存在斜面,需要对相机模块进行一些倾斜,但是,普通的直线机器人上的相机模块一般不易旋转,因此,提供一种能够对相机模块进行角度调节的直线机器人就成为急需解决的问题了。
技术实现要素:
3.(一)要解决的技术问题
4.为了解决现有技术的上述问题,本实用新型提供一种能够对相机模块进行角度调节的直线机器人。
5.(二)技术方案
6.为了达到上述目的,本实用新型采用的主要技术方案包括:
7.一种直线机器人,包括x轴移动组件、y轴移动组件和z轴移动组件,所述z轴移动组件包括滑动安装在y轴移动组件上的移动座,所述移动座的一侧设置有限位轨道,所述限位轨道滑动安装有z轴轨道,所述移动座内设置有第一电机,所述第一电机的输出端上安装有主动轮一,所述z轴轨道的背部设置有与所述主动轮一相适配的第一齿条,所述z轴轨道在所述第一电机的转动下沿所述限位轨道上下移动,所述z轴轨道表面设置有用于安装相机模块的安装板,所述安装板的背部通过转轴连接至所述z轴轨道内部,所述z轴轨道内设置有限制所述转轴旋转的限制组件,所述限制组件包括外壳,所述转轴上设置有齿轮,且所述齿轮位于所述外壳内,所述外壳内壁底部设置有凹槽,所述凹槽内滑动安装滑板,所述滑板的底部设置有弹簧一,所述滑板的顶部设置有棘齿,所述棘齿啮合所述齿轮并限制所述齿轮只能顺时针旋转;所述安装板的右下角处设置有偏心重锤。
8.优选的,所述外壳内设置有用于固定所述齿轮的固定组件。
9.优选的,所述固定组件包括滑动安装在所述外壳内的固定板,所述固定板底部设置有用于卡接所述齿轮的齿块,所述固定板的顶部设置有l型拉杆,所述l型拉杆的水平部分穿设所述外壳并延伸至z轴轨道外,所述l型拉杆的竖直部分上套设有弹簧二,所述弹簧二的一端连接所述固定板,所述弹簧二的另一端连接外壳内壁顶部,所述z轴轨道的侧壁上设置有与所述l型拉杆相对应的活动槽。
10.优选的,所述x轴移动组件包括两组机架,所述机架的顶部均设置有x轴轨道,所述y轴移动组件滑动安装在两个所述x轴轨道间,所述y轴移动组件包括y轴轨道,所述y轴轨道底部设置有丝杆,所述丝杆的两端均设置有主动轮二,所述x轴轨道内壁设置有与所述主动
轮二相适配的齿条二,所述丝杆通过传动机构连接第二电机,所述y轴轨道在第二电机的驱动选下沿所述x轴轨道移动。
11.优选的,所述移动座内设置有第三电机,所述第三电机的输出端安装有主动轮三,所述y轴轨道上设置有与所述主动轮相适配的齿条三,所述移动座第三电机的驱动选下沿所述y轴轨道移动。
12.(三)有益效果
13.本实用新型的有益效果在于:采用上述技术方案,在轴移动组件、y轴移动组件和z轴移动组件的配合作用下,能够对相机模块的高度及位置进行调整,在棘齿的作用下,齿轮只能顺时针旋转旋转,因此,安装板也只能绕着转轴顺时针旋转旋转,安装板的右下角处设置的偏心重锤使得安装板在重力的作用下自然向逆时针方向旋转,由于棘齿的限制,能够防止齿轮逆转,因此,在不受外力的情况下,转动安装板后,安装板能够固定停留在旋转后的位置,实现定位。
附图说明
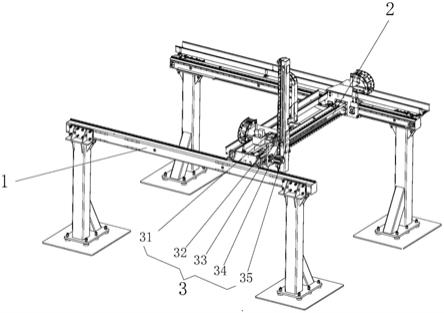
14.图1为一种直线机器人的结构示意图一;
15.图2为一种直线机器人的结构示意图二;
16.图3为安装板的安装结构示意图;
17.图4为限制组件的结构示意图;
18.图5为安装板的连接z轴轨道的结构示意图。
19.【附图标记说明】
20.1-x轴移动组件;2-y轴移动组件;3-z轴移动组件;4-转轴;5-限制组件;6-活动槽;7-齿轮;8-偏心重锤;11-机架;12-x轴轨道;13-齿条二;21-丝杆;22-第二电机;23-y轴轨道;31-第一电机;32-移动座;33-限位轨道;34-z轴轨道;35-安装板;51-外壳;52-凹槽;53-弹簧一;54-滑板;55-棘齿;56-固定板;57-弹簧二;58-l型拉杆。
具体实施方式
21.为了更好的解释本实用新型,以便于理解,下面结合附图,通过具体实施方式,对本实用新型作详细描述。
22.请参照图1至图5,本实用新型提供一种直线机器人,包括x轴移动组件1、y轴移动组件2和z轴移动组件3,z轴移动组件3包括滑动安装在y轴移动组件2上的移动座32,移动座32的一侧设置有限位轨道33,限位轨道33滑动安装有z轴轨道34,移动座32内设置有第一电机31,第一电机31的输出端上安装有主动轮一,z轴轨道34的背部设置有与主动轮一相适配的第一齿条,z轴轨道34在第一电机31的转动下沿限位轨道33上下移动,z轴轨道34表面设置有用于安装相机模块的安装板35,安装板35的背部通过转轴4连接至z轴轨道34内部,z轴轨道34内设置有限制转轴4旋转的限制组件5,限制组件5包括外壳51,转轴4上设置有齿轮7,且齿轮7位于外壳51内,外壳51内壁底部设置有凹槽52,凹槽52内滑动安装滑板54,滑板54的底部设置有弹簧一53,滑板54的顶部设置有棘齿55,棘齿55啮合齿轮7并限制齿轮7只能顺时针旋转;安装板35的右下角处设置有偏心重锤8;使用时,在轴移动组件、y轴移动组件2和z轴移动组件3的配合作用下,能够对相机模块的高度及位置进行调整,在棘齿55的作
用下,齿轮7只能顺时针旋转旋转,因此,安装板35也只能绕着转轴4顺时针旋转旋转,安装板35的右下角处设置的偏心重锤8使得安装板35在重力的作用下自然向逆时针方向旋转,由于棘齿55的限制,能够防止齿轮7逆转,因此,在不受外力的情况下,转动安装板35后,安装板35能够固定停留在旋转后的位置,实现定位。
23.需要说明的是,安装板35的旋转角度为0~90
°
。
24.本实施例中,外壳51内设置有用于固定齿轮7的固定组件,固定组件包括滑动安装在外壳51内的固定板56,固定板56底部设置有用于卡接齿轮7的齿块,固定板56的顶部设置有l型拉杆58,l型拉杆58的水平部分穿设外壳51并延伸至z轴轨道34外,l型拉杆58的竖直部分上套设有弹簧二57,弹簧二57的一端连接固定板56,弹簧二57的另一端连接外壳51内壁顶部,z轴轨道34的侧壁上设置有与l型拉杆58相对应的活动槽6,通过手动将l型拉杆58向上提拉,使固定板56脱离齿轮7,便能够对安装板35进行旋转,安装板35旋转后,松开l型拉杆58,实现对齿轮7的固定。
25.本实施例中,x轴移动组件1包括两组机架11,机架11的顶部均设置有x轴轨道12,y轴移动组件2滑动安装在两个x轴轨道12间,y轴移动组件2包括y轴轨道23,y轴轨道23底部设置有丝杆21,丝杆21的两端均设置有主动轮二,x轴轨道12内壁设置有与主动轮二相适配的齿条二13,丝杆21通过传动机构连接第二电机22,y轴轨道23在第二电机22的驱动选下沿x轴轨道12移动。
26.本实施例中,移动座32内设置有第三电机,第三电机的输出端安装有主动轮三,y轴轨道23上设置有与主动轮相适配的齿条三,移动座32第三电机的驱动选下沿y轴轨道23移动
27.本实用新型的工作原理如下:在轴移动组件、y轴移动组件2和z轴移动组件3的配合作用下,能够对相机模块的高度及位置进行调整,在棘齿55的作用下,齿轮7只能顺时针旋转旋转,因此,安装板35也只能绕着转轴4顺时针旋转旋转,安装板35的右下角处设置的偏心重锤8使得安装板35在重力的作用下自然向逆时针方向旋转,由于棘齿55的限制,能够防止齿轮7逆转,因此,在不受外力的情况下,转动安装板35后,安装板35能够固定停留在旋转后的位置,实现定位。
28.涉及到电路和电子元器件和模块均为现有技术,本领域技术人员完全可以实现,无需赘言,本实用新型保护的内容也不涉及对于软件和方法的改进。
29.以上仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本实用新型的专利保护范围内。
30.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1