一种快速可调的外骨骼机器人背架连接结构
1.本实用新型涉及人体穿戴辅助动力设备技术领域,特别是涉及一种快速可调的外骨骼机器人背架连接结构。
背景技术:
2.作为人体穿戴的辅助助力设备,近年来外骨骼机器人,在越来越多的领域得到广泛应用。在人穿着外骨骼时,要求外骨骼机器人既要方便快速地调节尺寸,适应不同身高的穿戴者,又要求外骨骼具有足够的强度,同时具有一定裕度的调节量,从而显著减少外骨骼对人体关节活动的约束,提高外骨骼机器人动作的灵活度和穿戴体验。现有外骨骼机器人不能满足上述使用需求。
技术实现要素:
3.本实用新型的目的是提供一种快速可调的外骨骼机器人背架连接结构,以解决上述现有技术存在的问题,使得外骨骼机器人能够适应不同身高的穿戴者。
4.为实现上述目的,本实用新型提供了如下方案:
5.本实用新型提供了一种快速可调的外骨骼机器人背架连接结构,包括背架和连接单元,所述连接单元包括连接件、回收基座、连接管和腰部连接杆,所述连接件固设在所述背架上,所述连接件和所述连接管均为套筒,所述连接管的顶部插设在所述连接件中,与所述回收基座的底端固连的插接杆插设在所述连接管中,所述连接件上设置有第一销孔,所述连接管的顶部设置有第二销孔,所述插接杆上设置有第三销孔,所述第一销孔、所述第二销孔和所述第三销孔同轴,所述连接件、所述连接管和所述插接杆通过第一快速插销固连,且所述第一快速插销穿过所述第一销孔、所述第二销孔和所述第三销孔;所述连接管上还设置有多个位于所述第二销孔下方的第四销孔,所述腰部连接杆的顶部插设在所述连接管中,所述腰部连接杆的顶部设置有多个均能够与任意一个所述第四销孔对齐的第五销孔,所述连接管和所述腰部连接杆通过第二快速插销固连,所述第二快速插销穿过相互对齐的所述第四销孔和所述第五销孔。
6.优选的,所述回收基座用于连接外骨骼机器人的吊带总成。
7.优选的,所述背架的左右两侧分别固设有一个所述连接单元。
8.优选的,所述背架用于封装外骨骼机器人的动力电池、控制单元和通讯单元。
9.优选的,所述回收基座倾斜设置,所述回收基座位于所述连接件的上方,所述插接杆、所述第一销孔、所述第二销孔和所述第三销孔均倾斜。
10.优选的,所述连接件的顶端对应所述回收基座设置有斜面。
11.优选的,多个所述第四销孔沿所述连接管的轴向间隔分布。
12.优选的,所述连接件的轴向竖直。
13.本实用新型相对于现有技术取得了以下技术效果:
14.本实用新型的快速可调的外骨骼机器人背架连接结构使得外骨骼机器人能够适
应不同身高的穿戴者。本实用新型的快速可调的外骨骼机器人背架连接结构连接管与腰部连接杆的多孔定位、快速插接的调节结构,可快速调整外骨骼机器人背架部位的长度,从而适配不同身高的使用者,提高了外骨骼机器人的穿戴体验和适配能力。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
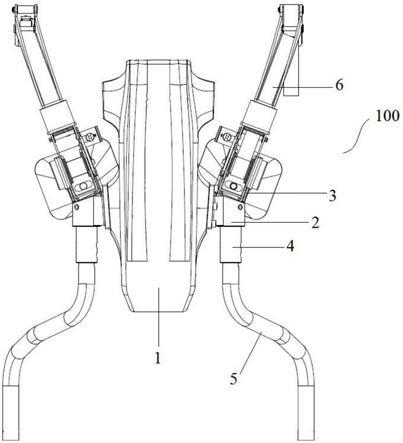
16.图1为本实用新型快速可调的外骨骼机器人背架连接结构的结构示意图;
17.图2为本实用新型快速可调的外骨骼机器人背架连接结构的部分结构示意图;
18.图3为本实用新型快速可调的外骨骼机器人背架连接结构中连接件的结构示意图;
19.图4为本实用新型快速可调的外骨骼机器人背架连接结构中回收基座的结构示意图;
20.图5为本实用新型快速可调的外骨骼机器人背架连接结构中连接管的结构示意图;
21.图6为本实用新型快速可调的外骨骼机器人背架连接结构中腰部连接杆的结构示意图;
22.其中:100、快速可调的外骨骼机器人背架连接结构;1、背架;2、连接件;201、第一销孔;3、回收基座;301、插接杆;302、第三销孔;4、连接管;401、第二销孔;402、第四销孔;5、腰部连接杆;501、第五销孔;502、第六销孔;6、吊带总成。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.本实用新型的目的是提供一种快速可调的外骨骼机器人背架连接结构,以解决上述现有技术存在的问题,使得外骨骼机器人能够适应不同身高的穿戴者。
25.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
26.如图1至图6所示:本实施例提供了一种快速可调的外骨骼机器人背架连接结构100,包括背架1和两个分别固设在背架1的左右两侧的连接单元,连接单元包括连接件2、回收基座3、连接管4和腰部连接杆5。
27.其中,背架1用于封装外骨骼机器人的动力电池、控制单元和通讯单元。连接件2为一侧固设有安装板的套筒,连接件2上的安装板通过螺钉固设安装在背架1上,连接件2的轴向竖直。回收基座3用于安装、连接外骨骼机器人的吊带总成6。
28.连接管4为套筒,连接管4的顶部插设在连接件2中,与回收基座3的底端固连的插
接杆301插设在连接管4中,连接件2上设置有第一销孔201,连接管4的顶部设置有第二销孔401,插接杆301上设置有第三销孔302,第一销孔201、第二销孔401和第三销孔302同轴,连接件2、连接管4和插接杆301通过第一快速插销固连,且第一快速插销穿过第一销孔201、第二销孔401和第三销孔302,通过第一快速插销使得连接件2、连接管4和插接杆301之间形成刚性连接。
29.连接管4上还设置有多个位于第二销孔401下方的第四销孔402,多个第四销孔402沿连接管4的轴向间隔分布,腰部连接杆5的顶部插设在连接管4中,腰部连接杆5的顶部设置有多个均能够与任意一个第四销孔402对齐的第五销孔501,连接管4和腰部连接杆5通过第二快速插销固连,第二快速插销穿过相互对齐的第四销孔402和第五销孔501,通过使不同的第四销孔402与不同的第五销孔501对齐来调节腰部连接杆5与连接管4的对接位置,从而快速调节腰部连接杆5插入连接管4中的长度,腰部连接杆5为一拟合人体后背至腰侧的s轨迹的圆形截面连接杆,腰部连接杆5绑缚在穿戴者的腰部,腰部连接杆5能够将吊带总成6受到的载荷传递到穿戴者的腰间;腰部连接杆5的底部还设置有用于连接外骨骼机器人其它部件的第六销孔502。
30.在本实施例中,回收基座3倾斜设置,回收基座3位于连接件2的上方,插接杆301、第一销孔201、第二销孔401和第三销孔302均倾斜。连接件2的顶端和连接管4的顶端分别对应回收基座3设置有斜面。
31.在本实用新型的描述中,需要说明的是,术语“顶”、“底”、“左”、“右”、“竖直”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
32.本说明书中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1