一种夹持机械手的夹持机构的制作方法
1.本技术涉及夹持装置领域,尤其是涉及一种夹持机械手的夹持机构。
背景技术:
2.pcb板等日常生活中常用的工件在生产完成后通常需要对pcb板进行移动,以使得pcb板从加工位置移出。相关技术中对pcb板进行移动的操作一般通过机械手进行,机械手通常为夹持气缸,夹持气缸包括缸体和铰接安装于缸体的两夹持爪,使用时通过缸体驱动两夹持爪朝相互靠近或远离的方向转动从而实现对pcb板的夹持。
3.针对上述中的相关技术,发明人认为夹持爪转动安装于缸体的设置不便于工作人员直观的对夹持爪的夹持位置进行观察,工作效率较低。
技术实现要素:
4.为了便于工作人员直观的对夹持气缸的夹持位置进行观察,提高工作效率,本技术提供一种夹持机械手的夹持机构。
5.本技术提供的一种夹持机械手的夹持机构采用如下的技术方案:
6.一种夹持机械手的夹持机构,包括夹持缸体、夹持活塞杆、联动件以及夹持爪,所述夹持活塞杆滑移配合于夹持缸体,所述联动件设置有两个,两所述联动件均转动安装于夹持缸体,所述夹持活塞杆用于驱动两联动件转动,所述夹持缸体开设有两位于同一水平线的夹持活动槽,所述夹持爪设置有两个,两所述夹持爪分别位于两夹持活动槽内并与夹持活动槽滑移配合,两所述联动件分别与两夹持爪转动连接。
7.通过采用上述技术方案,夹持缸体驱动夹持活塞杆进行运动时,两联动件因与夹持活塞杆的转动配合从而带动两夹持爪分别在两夹持活动槽内沿水平方向朝相互靠近或远离的方向滑移,从而使得两夹持爪实现对工件的夹持,两夹持爪沿水平方向对工件即pcb板进行夹持的设置便于工作人员直观的对夹持爪的夹持位置进行观察,从而有利于提高工作效率。
8.可选的,所述夹持缸体包括缸体部、第一端盖部、第二端盖部以及安装块,所述缸体部开设有贯穿设置的滑动槽,所述夹持活塞杆位于滑动槽内,所述第一端盖部安装于缸体部的一端并用于封闭滑动槽其中一槽口,所述安装块安装于缸体部远离第一端盖部的一端,所述安装块开设有供夹持活塞杆活动的活塞活动槽,所述安装块远离缸体部的一侧开设有与活塞活动槽相连通的安装活动槽,所述安装活动槽延伸至安装块的两侧,两所述夹持爪位于安装活动槽内并与安装活动槽滑移配合,所述第二端盖部安装于安装块远离缸体部的一端,两所述夹持活动槽开设于第二端盖部并与安装活动槽相连通。
9.通过采用上述技术方案,缸体部、第一端盖部、第二端盖部以及安装块的设置便于个工作人员实现对夹持缸体的拆装,从而对夹持缸体进行检修与维护,安装活动槽起到对夹持爪进一步的限位作用,从而有利于进一步保证夹持爪运动时的稳定性。
10.可选的,所述夹持爪均套设有防尘密封件,所述防尘密封件与夹持缸体抵接并用
于封闭夹持活动槽槽口。
11.通过采用上述技术方案,使得空气中的杂质在防尘密封件的阻挡作用下不易从活动槽槽口进入至夹持缸体内,进而有利于保证夹持缸体的洁净程度。
12.可选的,所述缸体部靠近安装块的一端嵌设安装有限位套,所述夹持活塞杆穿设于限位套并与限位套滑移配合。
13.通过采用上述技术方案,限位套起到对夹持活塞杆运动时进一步的限位作用,从而有利于进一步保证夹持活塞杆运动时的稳定性。
14.可选的,所述限位套嵌设安装有两限位密封件,其中一所述限位密封件抵触于滑动槽的槽壁,另一所述限位密封件抵触于夹持活塞杆的外壁。
15.通过采用上述技术方案,限位密封件的设置有利于保证限位套与滑动槽间和夹持活塞杆运动时与限位套间的密封性。
16.可选的,所述滑动槽内滑移配合有滑动套,所述夹持活塞杆安装于滑动套朝向限位套的一端,所述滑动套外嵌设安装有密封耐磨件,所述密封耐磨件抵触于滑动槽的槽壁。
17.通过采用上述技术方案,密封耐磨件的设置使得滑动套带动夹持活塞杆在活动槽内滑移时不易磨损和漏气,有利于保证滑动套滑移时的稳定性。
18.可选的,所述夹持活塞杆螺纹配合于滑动套朝向限位套的一端。
19.通过采用上述技术方案,夹持活塞杆与滑动套之间的连接结构简单,工作人员对夹持活塞杆与滑动套进行拆装的操作简便,从而便于实现对夹持活塞杆与滑动套的检修与维护。
20.可选的,所述滑动槽内设置有复位弹簧,所述复位弹簧的两端分别抵触于滑动套和限位套。
21.通过采用上述技术方案,复位弹簧的弹力作用便于滑动套快速移动至远离限位套时的初始所在位置。
22.可选的,所述夹持活塞杆外套设有滑动缓冲件,所述滑动缓冲件位于滑动套与限位套之间。
23.通过采用上述技术方案,滑动缓冲件的设置使得滑动套与限位套之间不易出现因相互碰撞而受损的情况。
24.可选的,所述滑动槽远离安装块的槽壁嵌设安装有固定块,所述固定块嵌设安装有固定密封件,所述固定密封件抵触于滑动槽的槽壁。
25.通过采用上述技术方案,固定块和固定密封件的设置有利于进一步保证第一端盖封闭滑动槽其中一槽口时的密封性,从而保证夹持活塞杆在滑动槽内运动时的稳定性。
26.综上所述,本技术包括以下至少一种有益技术效果:
27.1、两夹持爪沿水平方向对工件即pcb板进行夹持的设置便于工作人员直观的对夹持爪的夹持位置进行观察,从而有利于提高工作效率。
28.2、防尘密封件的设置使得空气中的杂质在防尘密封件的阻挡作用下不易从活动槽槽口进入至夹持缸体内,进而有利于保证夹持缸体的洁净程度。
29.3、限位套起到对夹持活塞杆运动时进一步的限位作用,从而有利于进一步保证夹持活塞杆运动时的稳定性。
附图说明
30.图1是本技术实施例的整体结构示意图。
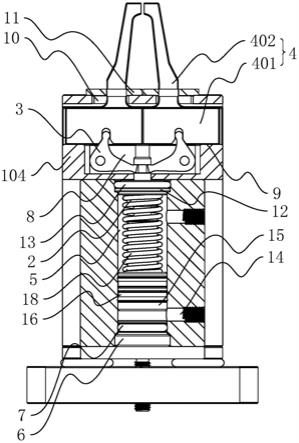
31.图2是本技术实施例中夹持缸体的局部剖视示意图。
32.图3是本技术实施例中夹持缸体另一视角的局部剖视示意图。
33.附图标记说明:
34.1、夹持缸体;101、缸体部;102、第一端盖部;103、第二端盖部;104、安装块;2、夹持活塞杆;3、联动件;4、夹持爪;401、固定部;402、夹持部;5、滑动槽;6、固定块;7、固定密封件;8、活塞活动槽;9、安装活动槽;10、夹持活动槽;11、防尘密封件;12、限位套;13、限位密封件;14、活动气孔;15、滑动套;16、密封耐磨件;17、滑动缓冲件;18、复位弹簧。
具体实施方式
35.以下结合附图1-3对本技术作进一步详细说明。
36.本技术实施例公开一种夹持机械手的夹持机构。参照图1和图2,夹持机械手的夹持机构包括夹持缸体1、夹持活塞杆2、联动件3以及夹持爪4,其中,夹持缸体1包括缸体部101、第一端盖部102、第二端盖部103以及安装块104。
37.参照图2和图3,缸体部101开设有沿自身长度方向贯穿设置的滑动槽5,夹持活塞杆2位于滑动槽5内,第一端盖部102通过螺栓固定于缸体部101的一端,且第一端盖部102用于封闭滑动槽5的其中一槽口。为保证第一端盖部102对滑动槽5其中一槽口进行封闭时的密封性,滑动槽5靠近第一端盖部102的槽壁嵌设安装有固定块6,固定块6嵌设安装有呈环状设置的固定密封件7,固定密封件7的外壁抵触于滑动槽5的槽壁。
38.参照图2,安装块104通过螺栓固定于缸体部101远离第一端盖部102的一端,安装块104朝向缸体部101的一侧开设有活塞活动槽8,以用于供夹持活塞杆2进行穿过。安装块104远离缸体部101的一侧开设有与活塞活动槽8相连通的安装活动槽9,安装活动槽9延伸至安装块104与缸体部101相邻的两侧。夹持爪4设置有两个,夹持爪4均包括固定部401和固定连接于固定部401的夹持部402,两夹持爪4的固定部401均位于安装活动槽9内并与安装活动槽9滑移配合。
39.继续参照图2,联动件3设置有两个,两联动件3均转动安装于安装块104并位于夹持活塞杆2的两侧,两联动件3的一端均与夹持活塞杆2转动配合,两联动件3的另一端分别与两固定部401转动配合,以使得夹持活塞杆2运动时,两联动件3在安装活动槽9的限位作用下带动两夹持爪4的固定部401朝相互靠近或远离的方向运动,从而使得两夹持部402实现对工件即pcb板的夹持固定或不固定。
40.参照图1和图2,第二端盖部103通过螺栓固定安装于安装块104远离缸体部101的一侧,第二端盖部103远离安装块104的一侧开设有两贯穿且与安装活动槽9相连通设置的夹持活动槽10,两夹持部402分别位于两夹持活动槽10内并与两夹持活动槽10滑移配合,以进一步保证夹持部402即夹持爪4运动时的稳定性。两夹持部402远离两固定部401的一端均电镀有金刚砂层,以保证夹持部402的结构强度,使得夹持部402不易损坏。为使灰尘等杂质不易通过夹持活动槽10槽口进入至缸体内,两夹持部402外均套设有防尘密封件11,防尘密封件11抵紧于第四端盖部远离安装块104的一侧,防尘密封件11用于封闭夹持活动槽10的槽口。
41.参照图2和图3,滑动槽5靠近安装块104的槽壁嵌设安装有限位套12,夹持活塞杆2穿设于限位套12并与限位套12滑移配合,以起到对夹持活塞杆2运动时的限位作用,从而保证夹持活塞杆2运动时的稳定性。限位套12远离第一端盖部102的一侧嵌设安装有两呈环状设置的限位密封件13,其中一限位密封件13的外壁抵触于滑动槽5的槽壁,另一限位密封件13的内壁抵触于夹持活塞杆2的侧壁,以保证限位套12与滑动槽5之间的密封性和夹持活塞杆2滑动时的密封性。
42.继续参照图2和图3,缸体部101开设有两活动气孔14,两活动气孔14与滑动槽5相连通且分别靠近夹持缸体1长度方向的两端设置。滑动槽5内滑移配合有滑动套15,滑动套15位于两活动气孔14之间,其中一活动气孔14进气、另一活动气孔14排气时,滑动套15在滑动槽5内滑移。夹持活塞杆2的一端螺纹连接于滑动套15远离第一端盖部102的一端,以使得滑动套15在滑动槽5内进行运动时,夹持活塞杆2随滑动套15一同进行运动。
43.继续参照图2和图3,滑动套15嵌设安装有两呈环状设置的密封耐磨件16,密封耐磨件16的材质选为橡胶,两密封耐磨件16的外壁均抵触于滑动槽5的槽壁,以使得滑动套15在滑动槽5内滑移时不易磨损和漏气,进而保证滑动套15滑移时的稳定性。夹持活塞杆2外套设有滑动缓冲件17,滑动缓冲件17的材质选为橡胶,滑动缓冲件17抵接于滑动套15朝向限位套12的一侧,以使得滑动套15与限位套12不易出现相互碰撞而受损的情况。滑动槽5内设置有复位弹簧18,复位弹簧18套设于滑动套15外,且复位弹簧18长度方向的两端分别抵触于滑动套15和限位套12,以便于滑动套15通过复位弹簧18的弹力进行复位。
44.本技术实施例一种夹持机械手的夹持机构的实施原理为:当夹持缸体1驱动滑动套15及夹持活塞杆2在滑动槽5内运动时,两联动件3因与夹持活塞杆2的转动配合从而带动两夹持爪4分别在两夹持活动槽10内沿水平方向朝相互靠近或远离的方向滑移,从而使得两夹持爪4实现对工件的夹持,两夹持爪4沿水平方向对工件即pcb板进行夹持的设置便于工作人员直观的对夹持爪4的夹持位置进行观察,从而有利于提高工作效率。
45.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1