一种六轴桌面机械臂集成控制柜底座的制作方法
1.本实用新型涉及械臂集成控制柜领域,具体涉及一种六轴桌面机械臂集成控制柜底座。
背景技术:
2.在桌面机械臂领域,机器人本体负载一般在3kg以内,机器人本体常常和底座和控制柜有分开或者集成在一起,这两种称为集成式底座控制柜和分离式底座控制柜,集成式底座控制柜的优点在于机械臂内部布线方便,整机搬用无需考虑电线问题,相对的,由于底座空间较小,控制器集成难度较高,散热调节比较差,需要优化解决这几方面的问题,而分离式底座和控制柜与之相反,机器人底座上除了接插件无任何控制板和电路元件,控制板和电路元件集成在额外的控制柜上,通过多芯电缆线和底座相连接,优点是控制柜空间较大,布线空间得到提高,缺点是紧凑程度降低,每次搬运都需要重新连接线缆。
技术实现要素:
3.本实用新型要解决的技术问题是现有产品的底座控制柜体积较大,多为分离式,需要有较多的多心线缆和插头,不便于使用,而集成式的底座控制柜却因为散热难以将机械臂整机功率做大,往往导致该底座控制柜的驱动的机械臂功率较小,此外,集成式底座控制柜还存在机械臂底座线束布置的问题,本实用新型提供一种六轴桌面机械臂集成控制柜底座,能够解决桌面机械臂的线束布置问题,同时集成度较高,所有按键和接口都在面板上,在底座控制柜尺寸适合机械臂本体尺寸的情况下,做到了不减少功率(整机功率120w),且散热良好,结构简单,便于使用,用以解决现有技术导致的缺陷。
4.为解决上述技术问题本实用新型提供以下的技术方案:
5.一种六轴桌面机械臂集成控制柜底座,其中,包含控制柜以及安装于所述控制柜上的控制组件、机械臂电机组件、机械臂旋转组件、风扇,所述机械臂电机组件安装于所述控制柜的顶部,所述机械臂旋转组件设置于所述机械臂电机组件的前侧并连接于所述控制柜,所述风扇安装于所述控制柜的后端面,所述控制组件安装于所述控制柜的一侧并通过无线与有线分别控制连接所述机械臂电机组件、所述风扇。
6.上述的一种六轴桌面机械臂集成控制柜底座,其中,所述控制柜由前壳体、后壳体、顶板、底板组成,所述前壳体与所述后壳体匹配连接并通过铜柱分别与所述顶板、所述底板连接,所述前壳体与所述后壳体上设有供所述铜柱贯穿的通孔,所述铜柱的上下两端分别与所述顶板、所述底板连接,可以可靠地连接整个所述控制柜的所述底板、所述顶板、所述脚垫,同时依靠所述铜柱,有效地增加了所述底板的刚度和负载强度;
7.所述机械臂电机组件安装于所述顶板的顶部,所述机械臂旋转组件连接于所述顶板,所述风扇安装于所述后壳体的后端面;
8.所述底板的底部安装有多个脚垫;
9.所述顶板与所述底板上开设有多个通风口,起到散热的作用。
10.上述的一种六轴桌面机械臂集成控制柜底座,其中,所述铜柱为双通铜柱,所述脚垫为尼龙脚垫,所述通孔为六角通孔,所述通风口为椭圆形。
11.上述的一种六轴桌面机械臂集成控制柜底座,其中,所述控制组件包含控制板、遥控器接收模块、dc电源头、控制按钮、输出端转接板、线路切换按钮、风扇开关按钮;
12.所述控制板、所述遥控器接收模块安装于所述底板的顶部,所述dc电源头、所述控制按钮安装于所述后壳体的外壁,所述输出端转接板安装于所述前壳体的内壁;
13.所述控制按钮控制连接所述控制板,所述遥控器接收模块通过无线与所述控制板连接进行数据传输,所述输出端转接板通过有线连接于所述控制板,所述控制板分别控制连接所述机械臂电机组件、所述风扇;
14.所述dc电源头电连接所述控制板、所述机械臂电机组件、所述机械臂旋转组件、所述风扇;
15.所述线路切换按钮、所述风扇开关按钮均安装于所述前壳体的一侧,所述线路切换按钮控制连接所述控制板进行有线与无线的切换,所述风扇开关按钮控制连接所述风扇。
16.上述的一种六轴桌面机械臂集成控制柜底座,其中,所述控制按钮为22mm的带灯按钮。
17.上述的一种六轴桌面机械臂集成控制柜底座,其中,所述机械臂电机组件包含电机安装座以及安装于所述电机安装座顶部的机械臂1轴电机,所述控制板控制连接所述机械臂1轴电机。
18.上述的一种六轴桌面机械臂集成控制柜底座,其中,所述机械臂旋转组件包含机械臂底部转台安装支撑板与轴向定位块,所述机械臂底部转台安装支撑板安装于所述顶板的顶部,所述轴向定位块安装于所述顶板的底部,所述轴向定位块的连接轴探出所述顶板与所述机械臂底部转台安装支撑板连接。
19.依据上述本实用新型一种六轴桌面机械臂集成控制柜底座提供的技术方案具有以下技术效果:
20.解决了桌面机械臂的线束布置问题,同时集成度较高,所有按键和接口都在面板上,在底座控制柜尺寸适合机械臂本体尺寸的情况下,做到了不减少功率(整机功率120w),且散热良好,结构简单,便于使用。
附图说明
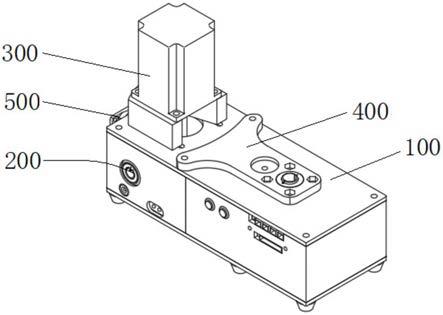
21.图1为本实用新型一种六轴桌面机械臂集成控制柜底座的结构示意图;
22.图2为本实用新型一种六轴桌面机械臂集成控制柜底座爆炸结构示意图。
23.其中,附图标记如下:
24.控制柜100、控制组件200、机械臂电机组件300、机械臂旋转组件400、风扇500、前壳体101、后壳体102、顶板103、底板104、铜柱105、通孔106、脚垫107、通风口108、控制板201、遥控器接收模块202、dc电源头203、控制按钮204、输出端转接板205、、线路切换按钮206、风扇开关按钮207、电机安装座301、机械臂1轴电机302、机械臂底部转台安装支撑板401、轴向定位块402、连接轴403。
具体实施方式
25.为了使实用新型实现的技术手段、创造特征、达成目的和功效易于明白了解,下结合具体图示,进一步阐述本实用新型。
26.须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容得能涵盖的范围内。
27.同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
28.本实用新型提供一种六轴桌面机械臂集成控制柜底座,目的是解决桌面机械臂的线束布置问题,同时集成度较高,所有按键和接口都在面板上,在底座控制柜尺寸适合机械臂本体尺寸的情况下,做到了不减少功率(整机功率120w),且散热良好,结构简单,便于使用。
29.如图1-2所示,一种六轴桌面机械臂集成控制柜底座,其中,包含控制柜100以及安装于控制柜100上的控制组件200、机械臂电机组件300、机械臂旋转组件400、风扇500,机械臂电机组件300安装于控制柜100的顶部,机械臂旋转组件400设置于机械臂电机组件300的前侧并连接于控制柜100,风扇500安装于控制柜100的后端面,控制组件200安装于控制柜100的一侧并通过无线与有线分别控制连接机械臂电机组件300、风扇500。
30.上述的一种六轴桌面机械臂集成控制柜100底座,其中,控制柜100由前壳体101、后壳体102、顶板103、底板104组成,前壳体101与后壳体102匹配连接并通过铜柱105分别与顶板103、底板104连接,前壳体101与后壳体102上设有供铜柱105贯穿的通孔106,铜柱105的上下两端分别与顶板103、底板104连接,可以可靠地连接整个控制柜100的底板104、顶板103、脚垫107,同时依靠铜柱105,有效地增加了底板104的刚度和负载强度;
31.机械臂电机组件300安装于顶板103的顶部,机械臂旋转组件400连接于顶板103,风扇500安装于后壳体102的后端面;
32.底板104的底部安装有多个脚垫107;
33.顶板103与底板104上开设有多个通风口108,起到散热的作用。
34.上述的一种六轴桌面机械臂集成控制柜底座,其中,铜柱105为双通铜柱,脚垫107为尼龙脚垫,通孔106为六角通孔,通风口108为椭圆形。
35.上述的一种六轴桌面机械臂集成控制柜底座,其中,控制组件200包含控制板201、遥控器接收模块202、dc电源头203、控制按钮204、输出端转接板205、线路切换按钮206、风扇开关按钮207;
36.控制板201、遥控器接收模块202安装于底板104的顶部,dc电源头203、控制按钮204安装于后壳体102的外壁,输出端转接板205安装于前壳体101的内壁;
37.控制按钮204控制连接控制板201,遥控器接收模块202通过无线与控制板201连接进行数据传输,输出端转接板205通过有线连接于控制板201,控制板201分别控制连接机械臂电机组件300、风扇500;
38.dc电源头203电连接控制板201、机械臂电机组件300、机械臂旋转组件400、风扇500;
39.线路切换按钮206、风扇开关按钮207均安装于前壳体101的一侧,线路切换按钮206控制连接控制板201进行有线与无线的切换,风扇开关按钮207控制连接风扇500。
40.上述的一种六轴桌面机械臂集成控制柜底座,其中,控制按钮204为22mm的带灯按钮。
41.上述的一种六轴桌面机械臂集成控制柜底座,其中,机械臂电机组件300包含电机安装座301以及安装于电机安装座301顶部的机械臂1轴电机302,控制板201控制连接机械臂1轴电机302。
42.上述的一种六轴桌面机械臂集成控制柜底座,其中,机械臂旋转组件400包含机械臂底部转台安装支撑板401与轴向定位块402,机械臂底部转台安装支撑板401安装于顶板103的顶部,轴向定位块402安装于顶板103的底部,轴向定位块402的连接轴403探出顶板103与机械臂底部转台安装支撑板401连接。
43.采用技术方案提供的一种六轴桌面机械臂集成控制柜底座,相对于传统方案,改进优化了支撑底座的结构,采用塑料件和碳钎维板结合的方案,起到了减轻重量的效果,同时具有优化过的走线槽,方便机械臂本体到控制柜底座的走线,依靠风扇500和设计的气流通道可以有效散热,起到提高功率的作用,该设计运用在桌面级机械臂底座上具有较大的应用空间和潜力。
44.综上,本实用新型的一种六轴桌面机械臂集成控制柜底座,能够解决桌面机械臂的线束布置问题,同时集成度较高,所有按键和接口都在面板上,在底座控制柜尺寸适合机械臂本体尺寸的情况下,做到了不减少功率(整机功率120w),且散热良好,结构简单,便于使用。
45.以上对实用新型的具体实施例进行了描述。需要理解的是,实用新型并不局限于上述特定实施方式,其中未尽详细描述的设备和结构应该理解为用本领域中的普通方式予以实施;本领域技术人员可以在权利要求的范围内做出各种变形或修改做出若干简单推演、变形或替换,这并不影响实用新型的实质内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1