一种抓取装置及其抓取系统
1.本实用新型属于农业技术领域,特别涉及一种抓取装置及其抓取系统。
背景技术:
2.在农业领域,单纯靠人工来完成农作物的栽培,移植,收获等工作已无法满足日益庞大的市场,且纯人工农业劳动存在人工成本日益增加,工作效率低,工作环境恶劣等问题。所以,农业机器人作为一种可替代人力的自动化或半自动化的可重复编程设备,在提高劳动生产率,改善农业劳动生产环境,减少农业工作中环境对人工造成的伤害,提高劳动质量等方面均起到了较大的作用。
3.可见,对于农作物的栽培和移植而言,现阶段一般通过人工完成,并且现有的一些辅助种植机械,存在自动化不高的技术弊端;
4.也即,对于现阶段一些辅助种植机械自动化不高的技术弊端而言,如何提高辅助种植机械的自动化程度,例如抓取植株并完成移栽程序等技术,是本领域技术人员亟待解决的技术问题。
技术实现要素:
5.本实用新型提供的一种抓取装置,以至少解决上述技术问题。
6.为了解决上述问题,本实用新型的第一方面提供一种抓取装置,所述抓取装置设置在盛放有幼苗的穴盘育苗盆上方,用于抓取穴盘育苗盆内的幼苗,所述抓取装置包括:机械臂、机械臂驱动组件和机械臂控制器,所述机械臂驱动组件与所述机械臂连接,所述机械臂控制器与所述机械臂控制组件连接;机械手和机械手驱动电机,所述机械手与所述机械手驱动电机连接,所述机械手驱动电机用于驱动所述机械手进行抓取动作;所述机械手设置在所述机械臂的一端,所述机械手用于抓取所述穴盘育苗盆内的幼苗;主控制器和定位摄像装置,所述主控制器与所述机械臂控制器、所述机械臂驱动组件以及所述定位摄像装置连接,所述定位摄像装置用于从当前视野拍摄图像,并将所述图像传输至所述主控制器,所述图像为所述穴盘育苗盆内目标幼苗的位姿。
7.在第一方面中,所述抓取装置还包括:电源,所述电源对应于与所述机械臂驱动组件、所述机械臂控制器、所述机械手驱动电机和主控制器连接及供电。
8.在第一方面中,所述电源包括可充电的储蓄电池。
9.在第一方面中,所述机械臂驱动组件包括,驱动电机和舵机;所述机械臂至少包括第一力臂和第二力臂,所述第一力臂与所述第二力臂之间活动连接,所述第二力臂远离所述第一力臂的一端设置所述机械手,所述第二力臂靠近所述第一力臂的一端通过所述驱动电机驱动,以使所述第二力臂相对于所述第一力臂在垂直方向转动。
10.在第一方面中,所述第一力臂远离所述第二力臂的一端通过所述舵机驱动,以使所述第一力臂在水平方向转动。
11.在第一方面中,所述定位摄像装置包括定位摄像头。
12.在第一方面中,所述定位摄像头是以stm32f427cpu为核心,集成ov7725摄像头芯片的openmv摄像头。
13.在第一方面中,所述机械臂控制器是意法半导体公司出品的stm32f系列32位arm微控制器。
14.在第一方面中,所述主控制器的芯片型号为stm32 f429型号。
15.第二方面,本实用新型提供了一种抓取系统,所述抓取系统包括上述任一一项所述的抓取装置。
16.有益效果:本实用新型提出了一种抓取装置,该抓取装置通过设置机械臂,以及在机械臂上设置机械手,利用该机械手对幼苗进行抓取,在抓取前,先通过设置在机械臂上的定位摄像头获取幼苗的位姿,然后在将该位姿信息发送至主控制器,该主控制器在依据该位姿信息控制机械臂控制器开启以驱动机械臂移动至幼苗的位置处,然后在控制机械手驱动电机驱动机械手进行抓取动作,该抓取动作将位于目标位置的幼苗进行机械抓取;综上所述,通过定位摄像头获取幼苗的位姿,在结合主控制器进行识别,先调整机械臂和机械手的位姿与幼苗的位姿相匹配,然后在控制机械臂以及机械手对幼苗进行抓取进而将该幼苗栽种在目标位置处,这样就使得,抓取幼苗的方式由传统的人工抓取方式变为上述的机械抓取方式,解放了人工,大大提高了工作效率。
附图说明
17.为了更清楚地说明本说明书实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
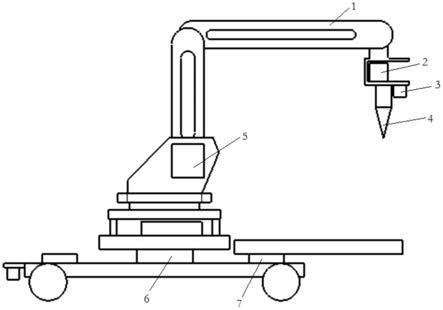
18.图1为本实用新型实施例一中抓取装置的结构图一;
19.图2为本实用新型实施例一中抓取装置的结构图二。
20.附图标记说明:
21.1、机械臂;
22.2、机械手驱动电机;
23.3、定位摄像装置;
24.4、机械手;
25.5、机械臂驱动电机;
26.6、主控制器;
27.7、电源;
28.8、机械臂控制器。
具体实施方式
29.下面将结合附图,对本实用新型中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
30.同时,本说明书实施例中,当组件被称为“固定于”另一个组件,它可以直接在另一
个组件上或者也可以存在居中组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本说明书实施例中所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明目的,并不是旨在限制本实用新型。
31.实施例一:
32.如图1-2所示,本实施例一提供了一种抓取装置,所述抓取装置设置在盛放有幼苗的穴盘育苗盆上方,用于抓取穴盘育苗盆内的幼苗,所述抓取装置包括:机械臂1、机械臂驱动组件和机械臂控制器8,所述机械臂驱动组件与所述机械臂1连接,所述机械臂控制器8与所述机械臂控制组件连接;机械手4和机械手驱动电机2,所述机械手4与所述机械手驱动电机2连接,所述机械手驱动电机2用于驱动所述机械手4进行抓取动作;所述机械手4设置在所述机械臂1的一端,所述机械手4用于抓取所述穴盘育苗盆内的幼苗;主控制器6和定位摄像装置3,所述主控制器6与所述机械臂控制器8、所述机械臂驱动组件以及所述定位摄像装置3连接,所述定位摄像装置3用于从当前视野拍摄图像,并将所述图像传输至所述主控制器6,所述图像为所述穴盘育苗盆内目标幼苗的位姿。
33.在上述实施例一的技术方案中,设置机械臂1,以及在机械臂1上设置机械手4,利用该机械手4对幼苗进行抓取,在抓取前,先通过设置在机械臂1上的定位摄像头获取幼苗的位姿,然后在将该位姿信息发送至主控制器6,该主控制器6在依据该位姿信息控制机械臂控制器8开启以驱动机械臂1移动至幼苗的位置处,然后在控制机械手驱动电机2驱动机械手4进行抓取动作,该抓取动作将位于目标位置的幼苗进行机械抓取;综上所述,通过定位摄像头获取幼苗的位姿,在结合主控制器6进行识别,先调整机械臂1和机械手4的位姿与幼苗的位姿相匹配,然后在控制机械臂1以及机械手4对幼苗进行抓取进而将该幼苗栽种在目标位置处,这样就使得,抓取幼苗的方式由传统的人工抓取方式变为上述的机械抓取方式,解放了人工,大大提高了工作效率。
34.对于抓取装置而言,作为抓取装置的而另一种实施方式,其还包括电源7,该电源7对应于与机械臂1驱动组件、机械臂控制器8、机械手驱动电机2和主控制器6连接及供电;
35.进一步地,电源7包括可充电的储蓄电池,具体可采用锂电池、铅蓄电池等。优选为锂电池,且锂电池具有如下优点:1.能量比较高。具有高储存能量密度,已达到460-600wh/kg,是铅酸电池的约6-7倍,应用于本实施例中的抓取装置中能够使得抓取装置的使用周期更长;2.使用寿命长,使用寿命可达到6年以上,磷酸亚铁锂为正极的电池1c(100%dod)充放电,有可以使用10,000次的记录;3.额定电压高(单体工作电压为3.7v或3.2v),约等于3只镍镉或镍氢充电电池的串联电压,便于组成电池电源7组;锂电池可以通过一种新型的锂电池调压器的技术,将电压调至3.0v,以适合小电器的使用。4.具备高功率承受力,其中电动汽车用的磷酸亚铁锂锂离子电池可以达到15-30c充放电的能力,便于高强度的启动加速;5.自放电率很低,这是该电池最突出的优越性之一,一般可做到1%/月以下,不到镍氢电池的1/20;6.重量轻,相同体积下重量约为铅酸产品的1/6-1/5。
36.具体来说,对于上述实施例中的机械臂1驱动组件而言,本实施例提出一种实施方式,该实施方式包括:驱动电机5和舵机;机械臂1至少包括第一力臂和第二力臂,第一力臂与第二力臂之间活动连接,第二力臂远离第一力臂的一端设置机械手4,用于抓取幼苗,第
二力臂靠近第一力臂的一端通过驱动电机5驱动,以使第二力臂相对于第一力臂在垂直方向转动。
37.进一步地,对于舵机的安装位置而言,本实施例一提出了一种实施方式,该实施方式包括:第一力臂远离第二力臂的一端通过舵机驱动,以使第一力臂在水平方向转动,进而使得机械臂1可在水平方向上发生转动。
38.具体而言,对于上述实施例中的摄像装置而言,本实施例提出一种实施方式,该实施方式包括:定位摄像装置3包括定位摄像头。
39.进一步地,对于摄像头的具体型号而言,本实施例提出一种实施方式,该实施方式包括:定位摄像头是以stm32f427cpu为核心,集成ov7725摄像头芯片的openmv摄像头。
40.具体而言,对于上述实施例中的机械臂控制器8的型号而言,本实施例提出一种实施方式,该实施方式包括:机械臂控制器8是意法半导体公司出品的stm32f系列32位arm微控制器。
41.具体而言,对于上述实施例中主控制器6来说,本实施例提出一种实施方式,该实施方式包括:主控制器6的芯片型号为stm32 f429型号。
42.实施例二:
43.本实用新型的实施例二提出了一种抓取系统,该抓取系统包括上述实施例一中的任一一项抓取装置以及托付该抓取装置进行位移的移动平台,该移动平台包括:移动底盘,所述移动底盘的上部设置有用于抓放幼苗的机械臂,所述底盘的下部设置有若干行走轮;寻迹摄像装置,所述寻迹摄像装置设置在所述底盘上,用于从当前视野拍摄图像;主控制器,所述主控制器与所述寻迹摄像装置连接,用于获取所述寻迹摄像装置拍摄的图像信息;若干底盘驱动电机,每一所述底盘驱动电机对应连接一所述行走轮;底盘控制器,所述底盘控制器设置在所述底盘上,并与所述主控制器连接,用于驱动所述行走轮行走至育苗位置处。
44.由于该实施例二与实施例一为同一发明构思下的一个实施例,其部分结构完全相同,因此对实施例二中与实施例一实质相同的结构不在详细阐述,未详述部分请参阅实施例一即可。
45.最后应说明的是:以上上述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的范围。都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
46.尽管本实用新型的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本实用新型的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1