一种动物识别自动报警机器人
1.本实用新型涉及一种工程领域,更具体的说是一种动物识别自动报警机器人。
背景技术:
2.动物识别自动报警机器人是一种常见的工程机械,例如专利号为cn110902607a的无人叉车及其视觉识别装置,该机构包括:上盖;底座,与上盖连接且形成密封的容置空间;视觉识别模块,设于容置空间内;以及多个补光灯,设于容置空间内,多个补光灯以视觉识别模块为中心呈环状围设于视觉识别模块外侧。一种无人叉车,包括:车体;货叉,连接于车体,用于承托货物;上述的视觉识别装置,内嵌于车体且外界光线能够进入视觉识别模块;驱动机构,设于车体以用于驱使车体运动;以及控制器,设于车体内且与视觉识别装置、驱动机构电性连接,控制器能够根据视觉识别装置识别的位置信息控制驱动机构调整车体的行进方向,但是该装置不能使机器人左右摇头扫描,并且不能增大扫描高度和改变扫描的角度。
技术实现要素:
3.本实用新型的目的是提供一种动物识别自动报警机器人,可以使机器人左右摇头扫描,并且可以增大扫描高度和改变扫描的角度,增大了动物识别的范围。
4.本实用新型的目的通过以下技术方案来实现:
5.一种动物识别自动报警机器人,包括前进及转向装置、探照及扫描装置、动力及报警装置、皮带一、皮带二,所述前进及转向装置与探照及扫描装置相连接,前进及转向装置与动力及报警装置相连接,前进及转向装置与皮带一相连接,前进及转向装置与皮带二相连接,动力及报警装置与皮带一相连接,动力及报警装置与皮带二相连接。
6.作为本技术方案的进一步优化,本实用新型一种动物识别自动报警机器人,所述前进及转向装置包括车板、车板支架、长杆一、转轮一、连接杆一、连接杆二、限位块一、腿架、限位块二、脚蹼、转轮二、转轮三、齿轮一、齿轮二、小圆柱、弯杆、拨杆、直杆齿、半齿轮、前轮支架、前轮,两个车板支架均与车板固定连接,车板支架与长杆一转动连接,长杆一与转轮一固定连接,两个转轮一均与长杆一固定连接,连接杆一与连接杆二铰接连接,连接杆二与限位块一滑动连接,两个限位块一均与车板支架转动连接,连接杆二与腿架铰接连接,腿架与限位块二滑动连接,四个限位块二均与车板滑动连接,腿架与脚蹼固定连接,长杆一与转轮三固定连接,转轮三与齿轮一啮合传动,齿轮一与齿轮二啮合传动,两个小圆柱均与齿轮二固定连接,车板与齿轮二转动连接,车板与弯杆转动连接,两个小圆柱均与弯杆配合连接,两个小圆柱均与拨杆配合连接,拨杆与直杆齿配合连接,车板与直杆齿滑动连接,弯杆与直杆齿配合连接,直杆齿与半齿轮啮合传动,车板与半齿轮转动连接,转轮一与皮带一配合连接,转轮二与皮带二配合连接。
7.作为本技术方案的进一步优化,本实用新型一种动物识别自动报警机器人,所述探照及扫描装置包括外杆、内杆、上支架、照明系统、激光扫描模块、弹簧一、弹性卡块、推
棒、弹簧二、卡片,外杆与内杆滑动连接,内杆与上支架转动连接,两个上支架均与照明系统固定连接,照明系统与激光扫描模块固定连接,外杆与弹簧一固定连接,内杆与弹簧一固定连接,内杆与弹性卡块固定连接,外杆与弹性卡块配合连接,外杆与推棒滑动连接,推棒与卡片固定连接,弹簧二与卡片固定连接,两个外杆均与半齿轮固定连接。
8.作为本技术方案的进一步优化,本实用新型一种动物识别自动报警机器人,所述动力及报警装置包括底板、底座、控制模块、拨片二、长杆二、齿轮三、齿轮四、转轮五、齿轮五、空心杆、电机、齿轮六、转轮六、长杆锤、支架八、弹簧八、铁锣支架、铁锣,底板与底座固定连接,底座与控制模块滑动连接,控制模块与拨片二固定连接,拨片二与长杆二配合连接,长杆二与齿轮三固定连接,齿轮三与齿轮四啮合传动,齿轮四与转轮五固定连接,长杆二与齿轮五固定连接,长杆二与空心杆配合连接,空心杆与电机固定连接,齿轮六与转轮六固定连接,转轮六与长杆锤配合连接,长杆锤与支架八铰接连接,长杆锤与弹簧八固定连接,长杆锤与铁锣配合连接,铁锣支架与铁锣固定连接,底板与铁锣支架固定连接,转轮五与皮带一配合连接,转轮五与皮带二配合连接,底板与车板固定连接。
9.本实用新型一种动物识别自动报警机器人的有益效果为:
10.本实用新型一种动物识别自动报警机器人,长杆一转动带动转轮三转动,带动齿轮一转动,带动齿轮二转动,带动两个小圆柱在齿轮二上转动;齿轮二顺时针转动,当小圆柱与弯杆接触,带动直杆齿向右运动,当小圆柱与拨杆接触时,带动直杆齿向左运动,进而带动直杆齿往复运动,带动半齿轮左右往复转动,带动探照及扫描装置左右往复转动,进而激光扫描模块可以左右范围扫描,增大了扫描的范围。
附图说明
11.下面结合附图和具体实施方法对本实用新型做进一步详细的说明。
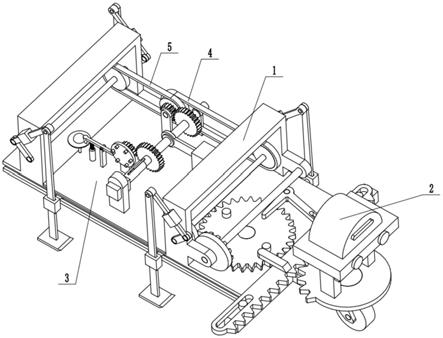
12.图1是本实用新型的整体结构示意图;
13.图2是本实用新型的前进及转向装置结构示意图一;
14.图3是本实用新型的前进及转向装置结构示意图二;
15.图4是本实用新型的前进及转向装置结构示意图三;
16.图5是本实用新型的前进及转向装置结构示意图四;
17.图6是本实用新型的探照及扫描装置结构示意图一;
18.图7是本实用新型的探照及扫描装置结构示意图二;
19.图8是本实用新型的动力及报警装置结构示意图一;
20.图9是本实用新型的动力及报警装置结构示意图二;
21.图10是本实用新型的动力及报警装置结构示意图三。
22.图中:1、前进及转向装置;101、车板;102、车板支架;103、长杆一;104、转轮一;105、连接杆一;106、连接杆二;107、限位块一;108、腿架;109、限位块二;110、脚蹼;111、转轮二;112、转轮三;113、齿轮一;114、齿轮二;115、小圆柱;116、弯杆;117、拨杆;118、直杆齿;119、半齿轮;120、前轮支架;121、前轮;2、探照及扫描装置;201、外杆;202内杆;203、上支架;204、照明系统;205、激光扫描模块;206、弹簧一;207、弹性卡块;208、推棒;209、弹簧二;210、卡片;3、动力及报警装置;301、底板;302、底座;303、控制模块;304、拨片二;305、长杆二;306、齿轮三;307、齿轮四;308、转轮五;309、齿轮五;310、空心杆;311、电机;312、齿轮
六;313、转轮六;314、长杆锤;315、支架八;316、弹簧八;317、铁锣支架;318、铁锣;4、皮带一;5、皮带二。
具体实施方式
23.下面结合附图对本实用新型作进一步详细说明。
24.本装置中所述的固定连接是指通过焊接、螺纹固定等方式进行固定,结合不同的使用环境,使用不同的固定方式;所述的转动连接是指通过将轴承烘装在轴上,轴或轴孔上设置有弹簧挡圈槽,通过将弹性挡圈卡在挡圈槽内实现轴承的轴向固定,实现转动;所述的滑动连接是指通过滑块在滑槽或导轨内的滑动进行连接;所述的铰接是指通过在铰链、销轴和短轴等连接零件上进行活动的连接方式;所需密封处均是通过密封圈或o形圈实现密封。
25.具体实施方式一:
26.启动电机311带动空心杆310转动,带动长杆二305转动,带动齿轮三306转动,带动齿轮四307转动,带动转轮五308转动,带动皮带一4皮带5转动;皮带一4皮带5转动进一步带动转轮一104和转轮二111转动,带动两个长杆一103转动,带动四个连接杆一105转动,带动四个连接杆二106运动,带动四个限位块一107转动,带动四个腿架108两两交替抬起向前运动,进而带动整个装置向前运动;长杆一103转动带动转轮三112转动,带动齿轮一113转动,带动齿轮二114转动,带动两个小圆柱115在齿轮二114上转动;齿轮二114顺时针转动,当小圆柱115与弯杆116接触,带动直杆齿118向右运动,当小圆柱115与拨杆117接触时,带动直杆齿118向左运动,进而带动直杆齿118往复运动,带动半齿轮119左右往复转动;
27.具体实施方式二:
28.激光扫描模块205可以左右范围扫描,照明系统204起到照明,增强视野的作用;转动上支架203可以调整照明和激光扫描的角度,按下推棒208,带动卡片210向内运动,带动弹簧二209压缩,推棒208将弹性卡块207推出,进而卡块207向上滑动,带动内杆202向上运动,进而可以调高照明和激光扫描的高度;
29.具体实施方式三:
30.当激光扫描模块205扫描到动物时,为控制模块303发出信号,控制模块303向左运动,带动拨片二304向左运动,带动长杆二305向左运动;致使齿轮三306与齿轮四307分开,齿轮四307停止转动,齿轮五309与齿轮六312啮合,进而带动齿轮六312转动,带动转轮六313转动,带动长杆锤314锤头一端敲打铁锣318发出响声,起到报警作用。
31.本实用新型的一种动物识别自动报警机器人,其工作原理为:启动电机311带动空心杆310转动,带动长杆二305转动,带动齿轮三306转动,带动齿轮四307转动,带动转轮五308转动,带动皮带一4皮带5转动;皮带一4皮带5转动进一步带动转轮一104和转轮二111转动,带动两个长杆一103转动,带动四个连接杆一105转动,带动四个连接杆二106运动,带动四个限位块一107转动,带动四个腿架108两两交替抬起向前运动,进而带动整个装置向前运动;长杆一103转动带动转轮三112转动,带动齿轮一113转动,带动齿轮二114转动,带动两个小圆柱115在齿轮二114上转动;齿轮二114顺时针转动,当小圆柱115与弯杆116接触,带动直杆齿118向右运动,当小圆柱115与拨杆117接触时,带动直杆齿118向左运动,进而带动直杆齿118往复运动,带动半齿轮119左右往复转动,带动探照及扫描装置2左右往复转
动,进而激光扫描模块205可以左右范围扫描,照明系统204起到照明,增强视野的作用;转动上支架203可以调整照明和激光扫描的角度,按下推棒208,带动卡片210向内运动,带动弹簧二209压缩,推棒208将弹性卡块207推出,进而卡块207向上滑动,带动内杆202向上运动,进而可以调高照明和激光扫描的高度;当激光扫描模块205扫描到动物时,为控制模块303发出信号,控制模块303向左运动,带动拨片二304向左运动,带动长杆二305向左运动;致使齿轮三306与齿轮四307分开,齿轮四307停止转动,齿轮五309与齿轮六312啮合,进而带动齿轮六312转动,带动转轮六313转动,带动长杆锤314锤头一端敲打铁锣318发出响声,起到报警作用。
32.当然,上述说明并非对本实用新型的限制,本实用新型也不仅限于上述举例,本技术领域的普通技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换,也属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1