一种工程训练智能搬运物流机器人
1.本实用新型属于搬运机械技术领域,具体是涉及一种工程训练智能搬运物流机器人。
背景技术:
2.随着制造业的不断发展,自动化搬运输送设备将得到大量使用并逐步朝着智能化和信息化方向迈进。其通过固定路径导引和自由路径导引能够将物料从一个位置搬运到目标位置,在制造业中,智能搬运物流机器人不但可以作为自动搬运车辆使用,还可以用作可移动的装配、加工平台使用。现有技术中的智能搬运物流机器人多采用轮式底盘结构结合机身安装的执行装置实现搬运功能,底盘结构需要较大的转向半径,在狭小或需要频繁转向的空间内运动受阻,不能很好的实现搬运工作。还有部分智能搬运物流机器人采用麦克纳姆轮底盘结构,麦克纳姆轮底盘结构即在一整块底盘上安装四个独立驱动的麦克纳姆轮,通过调整各轮转速实现智能搬运物流机器人原地转向。但是,该麦克纳姆轮底盘结构对地面结构要求较高,在平整路面能够正常运行,如遇不平整路面,由于地面的凹凸不同,使得四个麦克纳姆轮与地面的咬合力不均衡,容易造成打滑、跑偏及转向不到位等问题。
技术实现要素:
3.本实用新型的目的在于克服上述现有技术中的不足,提供一种工程训练智能搬运物流机器人,其通过共轴连接器使得前部车身与尾部车身形成悬挂扭腰结构,可以保证在不平整的路面上四个行走轮的支撑力基本一致,各个行走轮与地面的咬合力基本均衡,避免了打滑、跑偏及转向不到位等问题。
4.为实现上述目的,本实用新型采用的技术方案是:一种工程训练智能搬运物流机器人,其特征在于,包括车身、麦克纳姆行走轮、机械臂安装平台、机械臂和机械爪,所述麦克纳姆行走轮的数量为四个,所述四个麦克纳姆行走轮分别为第一行走轮、第二行走轮、第三行走轮和第四行走轮,所述第一行走轮、第二行走轮、第三行走轮和第四行走轮分别安装在车身底部的四个角上,所述机械臂安装平台固定安装在车身的上部,所述机械臂的下端安装在机械臂安装平台上,所述机械爪与机械臂的上端固定连接;
5.所述车身包括前部车身、尾部车身和共轴连接器,所述前部车身和尾部车身相邻设置,所述共轴连接器的一端与前部车身连接,所述共轴连接器的另一端与尾部车身连接且能够使尾部车身相对于前部车身沿贯穿前部车身和尾部车身的中轴线旋转预定的角度或前部车身相对于尾部车身沿贯穿前部车身和尾部车身的中轴线旋转预定的角度。
6.上述的一种工程训练智能搬运物流机器人,其特征在于:所述第一行走轮和第二行走轮分别安装在前部车身前端的左右两侧,所述第三行走轮和第四行走轮分别安装在尾部车身后端的左右两侧,所述第一行走轮、第二行走轮、第三行走轮和第四行走轮分别安装有独立的驱动装置,所述机械臂安装平台固定安装在前部车身的上部。
7.上述的一种工程训练智能搬运物流机器人,其特征在于:所述共轴连接器包括第
一连接座、第二连接座和连接轴,所述第一连接座固定设置在前部车身靠近尾部车身的一侧,所述第二连接座固定设置在尾部车身靠近前部车身的一侧,所述连接轴的一端与第一连接座连接,所述连接轴的另一端与第二连接座可转动连接,所述连接轴沿贯穿前部车身和尾部车身的中轴线方向设置。
8.上述的一种工程训练智能搬运物流机器人,其特征在于:所述工程训练智能搬运物流机器人还包括五组openmv机器视觉模块,所述五组openmv机器视觉模块分别为第一视觉模块、第二视觉模块、第三视觉模块、第四视觉模块和第五视觉模块,所述第一视觉模块、第二视觉模块、第三视觉模块和第四视觉模块分别设置在车身四条边的中部且所述第一视觉模块、第二视觉模块、第三视觉模块和第四视觉模块均设置在车身的下方,所述第五视觉模块可拆卸的设置在机械臂上。
9.上述的一种工程训练智能搬运物流机器人,其特征在于:所述第一视觉模块、第二视觉模块、第三视觉模块、第四视觉模块和第五视觉模块上均设置有用于为视觉模块提供稳定光照条件的光源拓展模块。
10.上述的一种工程训练智能搬运物流机器人,其特征在于:所述机械臂包括第一u形支架、第一舵机、第二u形支架、第二舵机、连接支架、第三舵机、第三u形支架和第四舵机,所述第一舵机固定安装在机械臂安装平台上,所述第一舵机的输出转轴与第一u形支架的开口端固定连接,所述第一u形支架的封闭端与第二u形支架的封闭端固定连接,所述第二舵机的输出转轴与第二u形支架的开口端固定连接,所述第二舵机固定安装在连接支架的一端上,所述第三舵机固定安装在连接支架的另一端上,所述第三舵机的输出转轴与第三u形支架封闭端的中部固定连接,所述第四舵机的输出转轴与第三u形支架开口端固定连接,所述第四舵机与机械爪固定连接。
11.上述的一种工程训练智能搬运物流机器人,其特征在于:所述机械爪包括机械爪连接支架、第五舵机和机械爪爪手,所述第五舵机固定在机械爪连接支架上,所述机械爪爪手与第五舵机连接;
12.所述机械爪连接支架包括上侧连接板、舵机固定板和下侧连接板,所述上侧连接板和下侧连接板平行设置,所述舵机固定板的上端与上侧连接板固定连接,所述舵机固定板的下端与下侧连接板固定连接,所述上侧连接板和下侧连接板位于舵机固定板的同一侧,所述第五舵机固定在舵机固定板上,所述第五舵机的输出转轴穿过上侧连接板后与机械爪爪手固定连接。
13.上述的一种工程训练智能搬运物流机器人,其特征在于:机械爪爪手包括主动钳和被动钳,所述主动钳的头部为主动钳抓取部,所述主动钳的尾部主动钳齿盘部,所述被动钳的头部为被动钳抓取部,所述被动钳的尾部被动钳齿盘部,所述主动钳齿盘部与被动钳齿盘部相啮合,所述主动钳齿盘部与第五舵机的输出转轴固定连接,所述主动钳抓取部和被动钳抓取部相对设置且用于夹持待搬运物体。
14.本实用新型与现有技术相比具有以下优点:
15.1、本实用新型通过共轴连接器使得前部车身与尾部车身形成悬挂扭腰结构,可以保证在不平整的路面上四个行走轮的支撑力基本一致,各个行走轮与地面的咬合力基本均衡,避免了打滑、跑偏及转向不到位等问题。
16.2、本实用新型采用openmv机器视觉模块循迹,在openmv机器视觉模块添加光源拓
展模块,使得搬运物流机器人能够在不同自然光环境中稳定运行。
17.3、本实用新型采用五个自由度机械臂,能够在保证了机器臂强度使下机器臂不再颤抖的同时提高了机器臂的灵活性,使得机械臂能够在复杂的环境中轻松完成抓取任务。
18.4、本实用新型采用麦克纳姆轮,通过控制麦克纳姆轮转速和转向可以实现搬运物流机器人任意方向运动。
19.下面通过附图和实施例,对本实用新型做进一步的详细描述。
附图说明
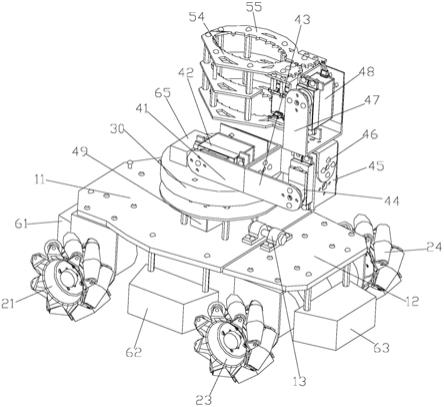
20.图1为本实用新型的立体结构示意图。
21.图2为本实用新型的右视图。
22.图3为本实用新型的仰视图。
23.图4为本实用新型的机械爪的立体结构示意图。
24.附图标记说明:
25.10—车身;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11—前部车身;
ꢀꢀꢀꢀꢀꢀꢀ
12—尾部车身;
26.13—共轴连接器;
ꢀꢀꢀꢀꢀ
14—第一连接座;
ꢀꢀꢀꢀꢀ
15—第二连接座;
27.16—连接轴;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20—麦克纳姆行走轮;
28.21—第一行走轮;
ꢀꢀꢀꢀꢀ
22—第二行走轮;
ꢀꢀꢀꢀꢀ
23—第三行走轮;
29.24—第四行走轮;
ꢀꢀꢀꢀꢀ
30—机械臂安装平台;
30.40—机械臂;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41—第一u形支架;
ꢀꢀꢀꢀ
42—第一舵机;
31.43—第二u形支架;
ꢀꢀꢀꢀ
44—第二舵机;
ꢀꢀꢀꢀꢀꢀꢀ
45—连接支架;
32.46—第三舵机;
ꢀꢀꢀꢀꢀꢀꢀ
47—第三u形支架;
ꢀꢀꢀꢀ
48—第四舵机;
33.49—第六舵机;
ꢀꢀꢀꢀꢀꢀꢀ
50—机械爪;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
51—机械爪连接支架;
34.51-1—上侧连接板;
ꢀꢀꢀ
51-2—舵机固定板;
ꢀꢀꢀ
51-3—下侧连接板;
35.52—第五舵机;
ꢀꢀꢀꢀꢀꢀꢀ
53—机械爪爪手;
ꢀꢀꢀꢀꢀ
54—主动钳;
36.54-1—主动钳抓取部; 54-2—主动钳齿盘部; 55—被动钳;
37.55-1—被动钳抓取部; 55-2—被动钳齿盘部; 61—第一视觉模块;
38.62—第二视觉模块;
ꢀꢀꢀ
63—第三视觉模块;
ꢀꢀꢀ
64—第四视觉模块;
39.65—第五视觉模块;
ꢀꢀꢀ
66—光源拓展模块。
具体实施方式
40.下面将参照附图更详细地描述本实用新型的实施例。虽然附图中显示了本实用新型的某些实施例,然而应当理解的是,本实用新型可以通过各种形式来实现,而且不应该被解释为限于这里阐述的实施例,相反提供这些实施例是为了更加透彻和完整地理解本实用新型。应当理解的是,本实用新型的附图及实施例仅用于示例性作用,并非用于限制本实用新型的保护范围。
41.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
42.在本实用新型中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的,或者是针对部件本身在竖直、垂直或重力方向上而言的;同
样地,为便于理解和描述,“内、外”是指相对于各部件本身的轮廓的内、外,但上述方位词并不用于限制本实用新型。本实用新型中提及的“第一”、“第二”等概念仅用于对不同的装置、模块或单元进行区分,并非用于限定这些装置、模块或单元所执行的功能的顺序或者相互依存关系。
43.如图1和图2所示,本实用新型公开了一种工程训练智能搬运物流机器人,其包括车身10、麦克纳姆行走轮20、机械臂安装平台30、机械臂40和机械爪50,所述麦克纳姆行走轮20的数量为四个,所述四个麦克纳姆行走轮20分别为第一行走轮21、第二行走轮22、第三行走轮23和第四行走轮24,所述第一行走轮21、第二行走轮22、第三行走轮23和第四行走轮24分别安装在车身10底部的四个角上,所述机械臂安装平台30固定安装在车身10的上部,所述机械臂40的下端安装在机械臂安装平台30上,所述机械爪50与机械臂40的上端固定连接;
44.所述车身10包括前部车身11、尾部车身12和共轴连接器13,所述前部车身11和尾部车身12相邻设置,所述共轴连接器13的一端与前部车身11连接,所述共轴连接器13的另一端与尾部车身12连接且能够使尾部车身12相对于前部车身11沿贯穿前部车身11和尾部车身12的中轴线旋转预定的角度或前部车身11相对于尾部车身12沿贯穿前部车身11和尾部车身12的中轴线旋转预定的角度。
45.本实施例中将车身10分成了前后相邻的两个部分,分别为前部车身11和尾部车身12。前部车身11和尾部车身12之间通过共轴连接器13连接,形成悬挂扭腰结构,可以保证在不平整的路面上四个行走轮的支撑力基本一致,各个行走轮与地面的咬合力基本均衡,避免了打滑、跑偏及转向不到位等问题。
46.如图2和图3所示,所述第一行走轮21和第二行走轮22分别安装在前部车身11前端的左右两侧,所述第三行走轮23和第四行走轮24分别安装在尾部车身12后端的左右两侧,所述第一行走轮21、第二行走轮22、第三行走轮23和第四行走轮24分别安装有独立的驱动装置,所述机械臂安装平台30固定安装在前部车身11的上部。
47.如图2和图3所示,所述共轴连接器13包括第一连接座14、第二连接座15和连接轴16,所述第一连接座14固定设置在前部车身11靠近尾部车身12的一侧,所述第二连接座15固定设置在尾部车身12靠近前部车身11的一侧,所述连接轴16的一端与第一连接座14连接,所述连接轴16的另一端与第二连接座15可转动连接,所述连接轴16沿贯穿前部车身11和尾部车身12的中轴线方向设置。
48.如图1和图2所示,所述工程训练智能搬运物流机器人还包括五组openmv机器视觉模块,所述五组openmv机器视觉模块分别为第一视觉模块61、第二视觉模块62、第三视觉模块63、第四视觉模块64和第五视觉模块65,所述第一视觉模块61、第二视觉模块62、第三视觉模块63和第四视觉模块64分别设置在车身10四条边的中部且所述第一视觉模块61、第二视觉模块62、第三视觉模块63和第四视觉模块64均设置在车身10的下方,所述第五视觉模块65可拆卸的设置在机械臂40上。
49.如图3所示,所述第一视觉模块61、第二视觉模块62、第三视觉模块63、第四视觉模块64和第五视觉模块65上均设置有用于为视觉模块提供稳定光照条件的光源拓展模块66。
50.本实施例中采用了openmv机器视觉模块,该机器视觉模块可用于寻找色块、条码识别、边缘检测、标志跟踪等。第一视觉模块61、第二视觉模块62、第三视觉模块63、第四视
觉模块64均设置在车身10的下方其主要用于循迹,第五视觉模块65固定在机械臂40其主要用于识别条形码、二维码和识别抓取物的颜色。在视觉模块上增加光源拓展模块66,光源拓展模块66可以提供稳定光照条件,使视觉模块能够在不同自然光环境中稳定运行。光源拓展模块66可以是通过视觉模块或者控制器控制的led光源。
51.如图1所示,所述机械臂40包括第一u形支架41、第一舵机42、第二u形支架43、第二舵机44、连接支架45、第三舵机46、第三u形支架47和第四舵机48,所述第一舵机42固定安装在机械臂安装平台30上,所述第一舵机42的输出转轴与第一u形支架41的开口端固定连接,所述第一u形支架41的封闭端与第二u形支架43的封闭端固定连接,所述第二舵机44的输出转轴与第二u形支架43的开口端固定连接,所述第二舵机44固定安装在连接支架45的一端上,所述第三舵机46固定安装在连接支架45的另一端上,所述第三舵机46的输出转轴与第三u形支架47封闭端的中部固定连接,所述第四舵机48的输出转轴与第三u形支架47开口端固定连接,所述第四舵机48与机械爪50固定连接。
52.本实施例中,所述第一舵机42、第二舵机44和第四舵机48均采用270度数字舵机,第三舵机46采用360度数字舵机,使得机械臂40的第一u形支架41相对于机械臂安装平台30有一个由第一舵机42控制的自由度,第二u形支架43相对于连接支架45有一个由第二舵机44控制的自由度,连接支架45相对于第三u形支架47有一个由第三舵机46控制的自由度,第三u形支架47相对于机械爪50有一个由第四舵机48控制的自由度,机械臂安装平台30为可沿水平面转动的转动平台有第六舵机49控制,所以该机械臂40有五个自由度,在保证了机器臂强度使下机器臂不再颤抖的同时提高了机器臂的灵活性,使得机械臂能够在复杂的环境中轻松完成抓取任务。
53.如图4所示,所述机械爪50包括机械爪连接支架51、第五舵机52和机械爪爪手53,所述第五舵机52固定在机械爪连接支架51上,所述机械爪爪手53与第五舵机52连接;
54.所述机械爪连接支架51包括上侧连接板51-1、舵机固定板51-2和下侧连接板51-3,所述上侧连接板51-1和下侧连接板51-3平行设置,所述舵机固定板51-2的上端与上侧连接板51-1固定连接,所述舵机固定板51-2的下端与下侧连接板51-3固定连接,所述上侧连接板51-1和下侧连接板51-3位于舵机固定板51-2的同一侧,所述第五舵机52固定在舵机固定板51-2上,所述第五舵机51的输出转轴穿过上侧连接板51-1后与机械爪爪手53固定连接。
55.如图4所示,机械爪爪手53包括主动钳54和被动钳55,所述主动钳54的头部为主动钳抓取部54-1,所述主动钳54的尾部主动钳齿盘部54-2,所述被动钳55的头部为被动钳抓取部55-1,所述被动钳55的尾部被动钳齿盘部55-2,所述主动钳齿盘部54-2与被动钳齿盘部55-2相啮合,所述主动钳齿盘部54-2与第五舵机52的输出转轴固定连接,所述主动钳抓取部54-1和被动钳抓取部55-1相对设置且用于夹持待搬运物体。
56.以上所述,仅是本实用新型的较佳实施例,并非对本实用新型作任何限制,凡是根据本实用新型技术实质对以上实施例所作的任何简单修改、变更以及等效结构变换,均仍属于本实用新型技术方案的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1