一种正压驱动的微型软体夹爪的制作方法
1.本发明实施例涉及软体机械人领域,特别是涉及一种正压驱动的微型软体夹爪。
背景技术:
2.基于软体机器人技术研发出的软体夹爪,由于能够实现无损、包覆式的抓取,已广泛应用于食品生鲜、电子3c等多个领域。但目前的软体夹爪尺寸都较大,对于一些小尺寸物体(毫米级甚至更小级别)的抓取无能为力,如针头、小型结部等,现有的软体夹爪抓不住或不能精确抓取。目前也有一些通过负气压驱动闭合抓取的微型夹爪,但负气压驱动抓取时能够调整的气压范围较小,导致微型夹爪抓取时的力度会收到限制。并且使用负压驱动抓取的策略时,必须在控制器中额外增加抽真空装置,增加了成本。
3.综上所述,现有技术中存在的问题是,微型软体夹爪对小尺寸物体的抓不住以及不能精准抓取的问题,负压驱动的微型软体夹爪需要增加抽真空装置,导致微型软体夹爪的生产成本升高的问题。
技术实现要素:
4.本实用新型弥补了现有技术的缺陷,公开了一种正压驱动的微型软体夹爪。本方案采用外形整体尺寸较小的软体夹持部,以及正压系统对充气空间进行充气驱动微型软体夹爪夹持微小物品,驱动方式简单,驱动力范围广,能够精准抓取多种尺寸和广泛重量范围的微小物品,并且不使用真空阀,降低了整套装置的成本。本实用新型结构简单,充气空间形状也简单,加工制作步骤简单,成本低。
5.本实用新型的一种正压驱动的微型软体夹爪,包括固定安装部和软体夹持部,所述固定安装部与所述软体夹持部密封连接,所述固定安装部内设置中空的第一通道,所述软体夹持部包括连接部、膨出部和两个相配合用于夹持的夹爪,所述连接部、所述膨出部和两个所述夹爪一体成型,所述连接部内部、所述膨出部内部和两个所述夹爪内部均连通,所述连接部的内部和所述膨出部的内部设置类矩形的充气空间,所述连接部内部设置中空的第二通道,所述第二通道与所述充气空间的连接口相通,所述第一通道与第二通道相通,所述充气空间包括x方向边和y方向边,所述y方向边与两个所述夹爪的竖直方向相互平行,所述y方向边的边长大于所述x方向边的边长,所述连接部水平方向上宽度小于所述x方向边的边长。
6.本实用新型的一种正压驱动的微型软体夹爪,所述固定安装部包括安装板、连杆和安装头,所述安装板、所述连杆和所述安装头一体成型,所述安装头头部设置一圈凹陷部,所述凹陷部卡入所述连接部,通过过盈配合,与所述连接部密封连接,所述安装板上设置与正压系统连通的连接嘴,所述连接嘴与所述第一通道连通。
7.本实用新型的一种正压驱动的微型软体夹爪,所述安装头头部为宝塔头,所述宝塔头伸入所述连接部,与所述连接部密封连接。
8.本实用新型的一种正压驱动的微型软体夹爪,所述安装头头部为倒钩头,所述倒
钩头伸入所述连接部,与所述连接部密封连接。
9.本实用新型的一种正压驱动的微型软体夹爪,所述固定安装部为钢,合金,或者树脂。
10.本实用新型的一种正压驱动的微型软体夹爪,所述软体夹持部为硅橡胶或者橡胶。
附图说明
11.图1本实用新型一种正压驱动的微型夹爪结构示意图;
12.图2本实用新型固定安装部的剖视图;
13.图3本实用新型软体夹持部的剖视图。
14.图号说明
15.1.安装板
ꢀꢀꢀꢀꢀꢀꢀ
2.连杆
ꢀꢀꢀꢀꢀꢀꢀꢀ
3.安装头
ꢀꢀꢀꢀꢀꢀ
4.连接部
16.5.膨出部
ꢀꢀꢀꢀꢀꢀꢀ
6.夹爪
ꢀꢀꢀꢀꢀꢀꢀꢀ
7.第一通道
ꢀꢀꢀꢀ
8.第二通道
17.9.充气空间
ꢀꢀꢀꢀꢀ
10.y方向边
ꢀꢀꢀꢀ
11.x方向边
具体实施方式
18.下面结合附图的图1至图3对本实用新型的一种正压驱动的微型软体夹爪作进一步详细说明。
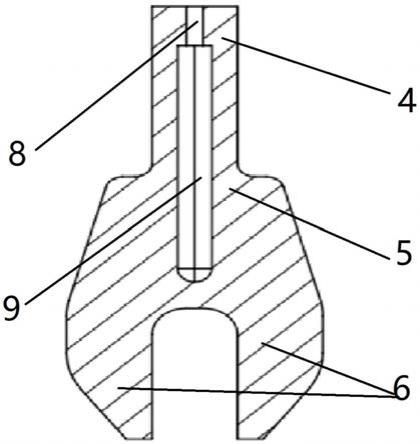
19.本实用新型的一种正压驱动的微型软体夹爪,请参考图1至图3,包括固定安装部和软体夹持部,所述固定安装部与软体夹持部密封连接,所述固定安装部内设置中空的第一通道7,所述软体夹持部包括连接部4、膨出部5和两个相配合用于夹持的夹爪6,连接部4、膨出部5和两个夹爪6一体成型,连接部4内部、膨出部5内部和两个夹爪6内部均连通,连接部4的内部和膨出部5的内部设置类矩形的充气空间9,连接部4内部设置中空的第二通道8,所述第二通道8与充气空间9的连接口相通,所述第一通道7与第二通道8相通,所述充气空间9包括x方向边11和y方向边10,所述y方向边10与至少两个夹爪6的竖直方向相互平行,y方向边10的边长大于x方向边11的边长,连接部4水平方向上宽度小于x方向边11的边长。
20.在本实施例中,充气空间9包括x方向边11和y方向边10,y方向边10的边长大于x方向边11的边长,连接部x轴水平方向上宽度小于x方向边11的边长。y方向边10的边长大于x方向边11的边长,一般都是y方向边10边长是x方向边11的边长的倍数关系,随着y方向边10边长是x方向边11边长的不同倍数关系,向充气空间9进行充气,y方向边10向外膨胀产生的驱动力范围大小不同。在本实施例中,即y方向边10边长是x方向边11的边长的2.5倍,充气空间9产生的驱动力范围为0.93n-1.1n。正压系统向充气空间9充气时,充气空间9会在x方向边11的y轴垂直方向上产生很大的膨胀,由于连接部4和膨出部5相通的内部空间在y轴方向的限制,限制了x方向边11在y轴垂直方向上的膨胀,因为连接部4水平方向上宽度小于x方向边11的边长,限制了y方向边10在连接部4内部x轴方向上的膨胀,使得y方向边10主要在膨出部5内部膨胀。在于y轴垂直方向与x轴水平方向相垂直的z轴方向上,膨出部5的平面面积很小,不能随着充气空间9膨胀而膨胀。当正压系统向充气空间9充气时,此时两个夹爪6与充气空间9两侧的y方向边10相切,随着y方向边10向x轴水平方向上往外的膨胀带动两个夹爪6的前端靠近闭合,从而达到抓取物品的目的。
21.所述固定安装部内设置中空的第一通道7,连接部4内部设置中空的第二通道8,所述第二通道8与充气空间9的连接口相通,所述第一通道7与第二通道8相通,以上结构组成了充气空间9的正压充气通道。
22.在本实施例中,所述软体夹持部包括连接部4、膨出部5和两个相配合用于夹持的夹爪6,连接部4、膨出部5和两个夹爪6一体成型,连接部4内部、膨出部5内部和两个夹爪6内部均连通,连接部4的内部和膨出部5的内部设置类矩形的充气空间9,以上结构为充气空间9提供了充气膨胀提供了空间,也为充气空间9驱动两个夹爪6前端闭合提供了空间。
23.本实用新型的一种正压驱动的微型软体夹爪,请参考图1至图3,所述固定安装部包括安装板1、连杆2和安装头3,所述安装板1、连杆2和安装头3一体成型,所述安装头3头部设置凹陷部,所述凹陷部卡入所述连接部4内,通过过盈配合,与连接部4密封连接,所述安装板1上设置与正压系统连通的连接嘴,所述连接嘴与所述第一通道7连通。
24.以上结构对固定安装部进行了限定,固定安装部是本装置与机械臂或者其他机构连接机构。最上端的安装板1能够与机械臂或者其他机构连接,安装板1上设置与正压系统连通的连接嘴,正压系统通过连接嘴对充气空间9进行充气。连杆2起到连接安装板1和安装头3的作用。安装头3用于与软体夹持部密封连接。在本实施例中,安装头3头部设置头凹陷部,所述凹陷部卡入所述连接部4内,通过过盈配合,与连接部4密封连接。安装头3与连接部4之间的密封连接,能够保证软体夹持部的气密性。
25.本实用新型的一种正压驱动的微型软体夹爪,请参考图1至图3,所述固定安装部为钢,合金,或者树脂。固定安装部使用钢,合金等金属材料加工制成,也可以用3d打印的树脂支架能够保证强度的材料加工制作而成。在本实施例中,固定安装部为树脂材料,通过3d打印得到。
26.本实用新型的一种正压驱动的微型软体夹爪,请参考图1至图3,所述软体夹持部为硅橡胶或者橡胶。夹爪6在充气空间9驱动下,夹爪6的前端向内闭合抓取微小物品。因此需要制造两个夹爪6的材料为弹性材料。因为所述软体夹持部包括连接部4、膨出部5和两个相配合用于夹持的夹爪6,连接部4、膨出部5和两个夹爪6一体成型,所以软体夹持部也需要为弹性材料。本实施例中,软体夹持部为硅橡胶。
27.实施例2
28.本实施例中与实施例1中相同的技术特征不再赘述,本实施例与实施例1中不同的特征在于:在本实施例中,所述安装头3头部为宝塔头,所述宝塔头伸入连接部4,与连接部4密封连接。在本实施例中,软体夹持部为橡胶,固体安装部为合金。
29.实施例3
30.本实施例中与实施例1中相同的技术特征不再赘述,本实施例与实施例1和实施例2中不同的特征在于:在本实施例中,所述安装头3头部为倒钩头,所述倒钩头伸入连接部4,与连接部4密封连接,本实施例中,固体安装部为钢。
31.上述仅对本实用新型中的几种具体实施例加以说明,但并不能作为本实用新型的保护范围,凡是依据本实用新型中的设计精神所做出的等效变化或修饰或等比例放大或缩小等,均应认为落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1