一种桁架机械手的自动装配流水线的制作方法
1.本实用新型属于机械手技术领域,具体为一种桁架机械手的自动装配流水线。
背景技术:
2.桁架机械手是一种建立在直角x,y,z三坐标系统基础上,对工件进行装配,或实现工件的轨迹运动等功能的自动装配流水线设备;其控制核心通过工业控制器实现;通过控制器对各种输入信号的分析处理,做出一定的逻辑判断后,对各个输出元件下达执行命令,完成x,y,z三轴之间的联合运动,以此实现一整套的全自动作业流程,但是现有桁架机械手的自动装配流水线在拆卸转运时,工作人员需要使用辅助工具反复对其进行操作才能对其进行拆卸,操作麻烦,且拆卸后的纵梁尺寸较差,使得工作人员不方便对其进行转运,因此需要一种桁架机械手的自动装配流水线来解决上述问题。
技术实现要素:
3.(一)解决的技术问题
4.为了克服现有技术的上述缺陷,本实用新型提供了一种桁架机械手的自动装配流水线,解决了现有桁架机械手的自动装配流水线在拆卸转运时,工作人员需要使用辅助工具反复对其进行操作才能对其进行拆卸,操作麻烦,且拆卸后的纵梁尺寸较差,使得工作人员不方便对其进行转运的问题。
5.(二)技术方案
6.为实现上述目的,本实用新型提供如下技术方案:一种桁架机械手的自动装配流水线,包括第二横梁,所述第二横梁设置在两个第一横梁内,所述第二横梁的右侧面设置有连接板,所述连接板的右侧面设置有气缸,所述气缸的底端设置有夹持机构,所述第一横梁的下表面设置有两个调节机构。
7.所述调节机构的底端设置在第一轴承内,所述第一轴承卡接在安装板的上表面,所述调节机构的外表面设置有第二轴承和第一齿轮,所述第一齿轮与第二齿轮相啮合,所述第二齿轮的下表面固定连接有驱动机构。
8.所述驱动机构设置在安装板的上表面,所述驱动机构下方的输出轴设置有第二丝杆筒,所述第二丝杆筒内螺纹连接有第二丝杆,所述第二丝杆的外表面设置有弹性管。
9.作为本实用新型的进一步方案:所述调节机构包括第一丝杆,所述第一丝杆的顶端与第一横梁的下表面固定连接,所述第一丝杆的外表面螺纹连接有第一丝杆筒,所述第一轴承和第二轴承设置在第一丝杆筒的外表面,所述第一齿轮卡接在第一丝杆筒的外表面。
10.作为本实用新型的进一步方案:所述第二轴承的左右两侧面均固定连接有固定杆,所述固定杆的底端与安装板的上表面固定连接。
11.作为本实用新型的进一步方案:所述驱动机构的左右两侧面均固定连接有连接杆,所述连接杆的底端与安装板的上表面固定连接。
12.作为本实用新型的进一步方案:所述连接板的形状设置为l形,所述安装板的下表面固定连接有两个定位杆。
13.作为本实用新型的进一步方案:所述夹持机构的上表面设置有两个清理机构,两个清理机构的顶端设置在同一个连接板的下表面。
14.作为本实用新型的进一步方案:所述清理机构包括活塞筒,所述活塞筒卡接在夹持机构的上表面,所述活塞筒内滑动连接有活塞杆,所述活塞杆的顶端与连接板的下表面固定连接,所述活塞筒的正面卡接有第一单向阀,所述活塞筒的底端卡接有第二单向阀。
15.(三)有益效果
16.与现有技术相比,本实用新型的有益效果在于:
17.1、该桁架机械手的自动装配流水线,通过设置第一丝杆、第一丝杆筒、第一轴承、第一齿轮、第二齿轮、驱动机构、第二丝杆筒、第二丝杆和弹性管,控制驱动机构反转,转动的第一丝杆筒通过第一丝杆带动第一横梁向下运动,同时转动的第二丝杆筒带动第二丝杆向下运动,使得变形的弹性管恢复原形进而与安装孔的内壁脱离,当第一丝杆完全运动到第一丝杆筒内时,恢复原形的弹性管与安装孔的内壁脱离,使得由第一丝杆、第一丝杆筒和安装板组成纵梁的尺寸在调短的同时还可与地面解除固定,操作简单,使得工作人员可方便的对调小后的纵梁进行拆卸和转运。
18.2、该桁架机械手的自动装配流水线,通过设置活塞筒、活塞杆、第一单向阀和第二单向阀,当气缸带动夹持机构向下运动时,外界的空气通过第一单向阀进入活塞筒内,夹持机构驱的夹持爪在对零件进行夹取,控制气缸收缩,活塞筒在活塞杆的外表面向上运动,活塞筒内的气体通过第二单向阀喷射在夹持的物料表面,使得物料表面的灰尘等脏污进行清理,使得零件表面的脏污不易影响其装配。
19.3、该桁架机械手的自动装配流水线,通过设置定位杆,当定位杆移动到地面上开设的定位孔内时,定位杆和定位杆相互配合可对安装板进行定位,使得移动的安装板可顺利的带动弹性管移动到安装孔内。
附图说明
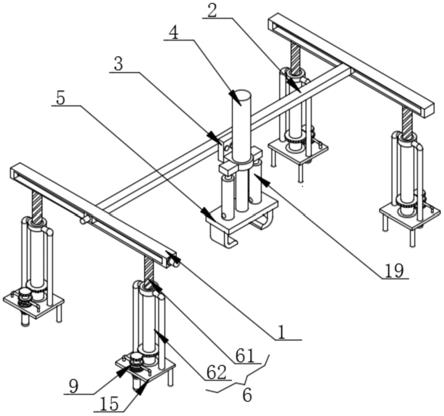
20.图1为本实用新型立体的结构示意图;
21.图2为本实用新型调节机构立体的结构示意图;
22.图3为本实用新型驱动机构立体的结构示意图;
23.图4为本实用新型清理机构立体的结构示意图;
24.图中:1第一横梁、2第二横梁、3连接板、4气缸、5夹持机构、6调节机构、61第一丝杆、62第一丝杆筒、7第一轴承、8第一齿轮、9第二齿轮、10驱动机构、11第二丝杆筒、12第二丝杆、13弹性管、14定位杆、15安装板、16第二轴承、17固定杆、18连接杆、19清理机构、191活塞筒、192活塞杆、193第一单向阀、194第二单向阀。
具体实施方式
25.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
26.如图1-4所示,本实用新型提供一种技术方案:一种桁架机械手的自动装配流水线,包括第二横梁2,第二横梁2设置在两个第一横梁1内,第二横梁2的右侧面设置有连接板
3,连接板3的右侧面设置有气缸4,通过设置气缸4,控制气缸4工作,气缸4可带动夹持机构5在竖直方向上运动,气缸4的底端设置有夹持机构5,第一横梁1的下表面设置有两个调节机构6。
27.调节机构6的底端设置在第一轴承7内,第一轴承7卡接在安装板15的上表面,调节机构6的外表面设置有第二轴承16和第一齿轮8,第一齿轮8与第二齿轮9相啮合,第二齿轮9的下表面固定连接有驱动机构10。
28.驱动机构10设置在安装板15的上表面,驱动机构10下方的输出轴设置有第二丝杆筒11,第二丝杆筒11内螺纹连接有第二丝杆12,第二丝杆12的外表面设置有弹性管13,通过设置弹性管13,当第二丝杆12向上运动时,因第二丝杆12的底端设置在楔形,第二丝杆12挤压弹性管13,使得弹性管13发生变形。
29.具体的,如图1和2所示,调节机构6包括第一丝杆61,第一丝杆61的顶端与第一横梁1的下表面固定连接,第一丝杆61的外表面螺纹连接有第一丝杆筒62,第一轴承7和第二轴承16设置在第一丝杆筒62的外表面,通过设置第一丝杆61和第一丝杆筒62,转动的第一丝杆筒62可通过第一丝杆61带动第一横梁1在竖直方向上运动,第一齿轮8卡接在第一丝杆筒62的外表面,第二轴承16的左右两侧面均固定连接有固定杆17,通过设置固定杆17,因固定杆17的两端与安装板15和第二轴承16进行连接,固定杆17可对第二轴承16进行固定,使得固定后的第二轴承16和第一轴承7相互配合可对第一丝杆筒62进行限位,使得第一丝杆筒62不会在转动时发生倾斜,固定杆17的底端与安装板15的上表面固定连接,驱动机构10的左右两侧面均固定连接有连接杆18,通过设置连接杆18,因连接杆18的两端与驱动机构10和安装板15进行连接,使得驱动机构10可通过连接杆18固定在安装板15上,连接杆18的底端与安装板15的上表面固定连接,连接板3的形状设置为l形,安装板15的下表面固定连接有两个定位杆14。
30.具体的,如图1和图4所示,夹持机构5的上表面设置有两个清理机构19,两个清理机构19的顶端设置在同一个连接板3的下表面,清理机构19包括活塞筒191,活塞筒191卡接在夹持机构5的上表面,活塞筒191内滑动连接有活塞杆192,活塞杆192的顶端与连接板3的下表面固定连接,活塞筒191的正面卡接有第一单向阀193,活塞筒191的底端卡接有第二单向阀194,通过设置第一单向阀193和第二单向阀194,因第一单向阀193和第二单向阀194的开向相反,第一单向阀193和第二单向阀194不会同时开启。
31.本实用新型的工作原理为:
32.s1、当需要对该装配流水线进行使用时,工作人员对该流水线进行使用时,移动第一横梁1,第一横梁1通过调节机构6和安装板15带动弹性管13和定位杆14分别运动到地面上的安装孔和定位孔内,控制驱动机构10正转,驱动机构10通过第一齿轮8带动第二齿轮9转动,转动的第二齿轮9带动第一丝杆筒62转动,转动的第一丝杆筒62通过第一丝杆61带动第一横梁1向上运动,同时驱动机构10带动第二丝杆筒11转动,转动的第二丝杆筒11带动第二丝杆12向上运动;
33.s2、其次,向上运动的第二丝杆12与弹性管13接触进而对其进行挤压,使得弹性管13变形进而与安装孔的内壁接触,当第一丝杆61运动到第一丝杆筒62的最上方时,由第二丝杆筒11、第二丝杆12和弹性管13构成的固定机构将该流水线固定在地面上,当需要对该装配流水线进行拆卸转运时,控制驱动机构10反转,驱动机构10通过第一齿轮8带动第二齿
轮9转动;
34.s3、最后,转动的第二齿轮9带动第一丝杆筒62转动,转动的第一丝杆筒62通过第一丝杆61带动第一横梁1向下运动,同时驱动机构10带动第二丝杆筒11转动,转动的第二丝杆筒11带动第二丝杆12向下运动,向下运动的第二丝杆12与弹性管13接触脱离,使得变形的弹性管13恢复原形进而与安装孔的内壁脱离,当第一丝杆61完全运动到第一丝杆筒62内时,恢复原形的弹性管13与安装孔的内壁脱离。
35.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
36.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1