一种电气自动化用机械手的制作方法
1.本实用新型涉及电气自动化技术领域,具体为一种电气自动化用机械手。
背景技术:
2.电气工程及其自动化专业是电气信息领域的一门新兴学科,但由于和人们的日常生活以及工业生产密切相关,发展非常迅速,现在也相对比较成熟。已经成为高新技术产业的重要组成部分,广泛应用于工业、农业、国防等领域,在国民经济中发挥着越来越重要的作用。其触角伸向各行各业,小到一个开关的设计,大到宇航飞机的研究,都有它的身影。本专业生能够从事与电气工程有关的系统运行、自动控制、电力电子技术、信息处理、试验技术、研制开发、经济管理以及电子与计算机技术应用等领域的工作,是宽口径“复合型”高级工程技术人才。该领域对高水平人才的需求很大。据估计,随着国外大企业的进入,在这一专业领域将出现很大缺口,那时很可能出现人才供不应求的现象。
3.现有电气自动化用机械手,如申请号为cn202020387252.2名称为“一种机械自动化用机械手抓取夹持装置”的中国专利,公开了一种机械自动化用机械手抓取夹持装置,包括连接杆、控制面板、电机和压力传感器,所述连接杆的内部固定安装有控制面板,所述连接杆的底端固定安装有安装座,所述安装座的外壁固定安装有电机,且电机的输出端固定安装有转杆,所述转杆的外壁套接有夹持板,所述安装座的底端中间位置处固定安装有固定杆,所述固定杆的内部固定安装有电动伸缩杆,且固定杆的内部开设有滑槽,所述滑槽的内部插设有滑杆。本实用新型通过设置有控制面板和压力传感器,可以根据零件的大小对零件进行加持,不会对零件产生损伤的情况,使用方便,固定杆和支撑杆可以对零件进行支撑,避免零件发生脱离的情况,操作简单,使用方便。
4.现有技术的不足之处在于:在进行电气自动化生产和制造过程中,需要使用到机械手,对生产的设备进行移动和搬运,现有的机械手灵活性不足,无法满足电气自动化生产的需要,实用性较低。
技术实现要素:
5.本实用新型的目的是提供一种电气自动化用机械手,以解决上述现有技术中的不足之处。
6.为了实现上述目的,本实用新型提供如下技术方案:一种电气自动化用机械手,包括工作台,所述工作台上转动连接有一旋转架,所述工作台上设置有一用于驱动旋转架转动的旋转机构,所述旋转架上滑动设置有一升降板,所述旋转架上设置有一用于驱动升降板上升降的升降机构,所述升降机构包括升降电机,所述升降电机转动轴上设置有第一驱动齿轮,所述升降板上开设有齿排,所述第一驱动齿轮与齿排啮合,所述升降板上设置一安装架,所述安装架上滑动设置有一夹持机构。
7.进一步地,所述升降机构还包括有导向齿轮以及第二驱动齿轮,所述旋转架上设置有一固定架,所述导向齿轮通过轴杆转动连接在固定架上,所述第一驱动齿轮与导向齿
轮之间啮合有一传动链条,所述升降板的两侧上均设置有齿排,所述第二驱动齿轮与其中一齿排啮合,所述导向齿轮远离传动链条的一端与第二驱动齿轮啮合。
8.进一步地,所述夹持机构包括安装框,所述安装框上设置有一夹持电机,所述夹持电机转动轴上设置有一正反丝杆,所述正反丝杆转动连接在安装框内部,所述正反丝杆的两端分别螺纹连接有驱动块,每个所述驱动块底部上均设置有夹持板,两所述夹持板上均设置有防滑齿。
9.进一步地,所述旋转机构包括旋转电机,所述旋转电机上设置有一转动齿轮,所述旋转架底部上设置有一旋转柱,所述旋转柱上设置有齿环,所述转动齿轮与齿环啮合。
10.进一步地,所述安装架底部开设有滑槽,安装架内部设置有一电动推杆,所述电动推杆设置有一安装块,所述安装块与安装框固定连接。
11.进一步地,所述旋转架远离升降板的一端设置有配重块。
12.与现有技术相比,本实用新型的有益效果为:通过工作台、旋转架、旋转机构、升降板、升降机构、升降电机、第一驱动齿轮、齿排、安装架、夹持机构之间的配合,通过旋转机构进行驱动旋转架转动,便于根据不同的工作环境需要进行调节该机械手的夹持的角度,升降电机转动轴转动带动第一驱动齿轮转动,进而通过第一驱动齿轮转动带动齿排滑动,进而带动升降板滑动,夹持机构通过滑动连接的方式设置在安装架上,便于根据不同工作环境进行调节夹持机构的使用,提高该机械手的灵活性,进一步提高该机械手的实用性。
附图说明
13.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
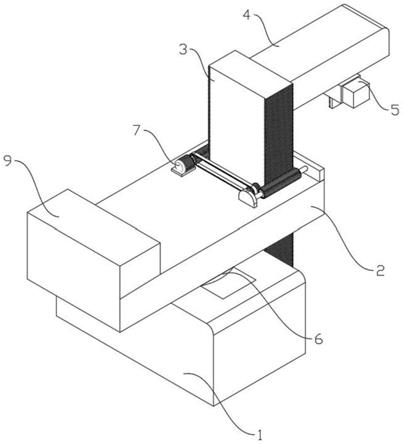
14.图1为本实用新型实施例提供的整体结构示意图;
15.图2为本实用新型实施例提供的局部结构示意图;
16.图3为本实用新型实施例提供的升降机构安装方式结构示意图;
17.图4为本实用新型实施例提供的夹持机构安装方式结构示意图;
18.图5为本实用新型实施例提供的夹持机构剖视结构示意图;
19.图6为本实用新型实施例提供的夹持机构结构示意图;
20.图7为本实用新型实施例提供的升降机构局部俯视结构示意图。
21.附图标记说明:1、工作台;2、旋转架;3、升降板;4、安装架;401、滑槽;402、电动推杆;403、安装块;5、夹持机构;501、夹持电机;502、正反丝杆;503、驱动块;504、夹持板;505、防滑齿;506、安装框;6、旋转机构;601、旋转电机;602、转动齿轮;603、齿环;7、升降机构;701、升降电机;702、第一驱动齿轮;703、导向齿轮;704、第二驱动齿轮;705、轴杆;706、齿排;707、传动链条;708、固定架;8、旋转柱;9、配重块。
具体实施方式
22.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍。
23.请参阅图1-7,本实用新型实施例提供的一种电气自动化用机械手,包括工作台1,
工作台1上转动连接有一旋转架2,工作台1上设置有一用于驱动旋转架2转动的旋转机构6,旋转架2上滑动设置有一升降板3,旋转架2上设置有一用于驱动升降板3上升降的升降机构7,升降机构7包括升降电机701,升降电机701转动轴上设置有第一驱动齿轮702,升降板3上开设有齿排706,第一驱动齿轮702与齿排706啮合,升降板3上设置一安装架4,安装架4上滑动设置有一夹持机构5。
24.具体的,该电气自动化用机械手,包括有工作台1,在工作台1上转动连接有旋转架2,旋转架2转动连接在工作台1上,便于根据不同的工作环境需要进行调节该机械手的夹持的角度,从而提高该机械手的实用性;在工作台1上设置有一用于驱动旋转架2转动的旋转机构6,通过旋转机构6进行驱动旋转架2转动;在旋转架2上滑动设置有一升降板3,通过升降板3的滑动,便于调节升降板3的高度,进而调节升降板3上的夹持机构5,便于根据不同的使用环境进行调节该机械手的工作状态,旋转架2上设置有一用于驱动升降板3上升降的升降机构7,通过升降机构7进行驱动升降板3的滑动,操作简单方便,其中升降机构7包括升降电机701,升降电机701转动轴上设置有第一驱动齿轮702,升降板3上开设有齿排706,第一驱动齿轮702与齿排706啮合,使用时,启动升降电机701,升降电机701转动轴转动带动第一驱动齿轮702转动,进而通过第一驱动齿轮702转动带动齿排706滑动,进而带动升降板3滑动;在升降板3上设置一安装架4,安装架4上滑动设置有一夹持机构5,夹持机构5通过滑动连接的方式设置在安装架4上,便于根据不同工作环境进行调节夹持机构5的使用,进一步提高该机械手的实用性。
25.升降机构7还包括有导向齿轮703以及第二驱动齿轮704,旋转架2上设置有一固定架708,导向齿轮703通过轴杆705转动连接在固定架708上,第一驱动齿轮702与导向齿轮703之间啮合有一传动链条707,升降板3的两侧上均设置有齿排706,第二驱动齿轮704与其中一齿排706啮合,导向齿轮703远离传动链条707的一端与第二驱动齿轮704啮合。
26.优选的,其中升降机构7还包括有导向齿轮703以及第二驱动齿轮704,通升降板3的两侧上均上设置有齿排706,且分别通过第一驱动齿轮702以及第二驱动齿轮704啮合,便于提高该升降板3滑动的稳定性;使用时,启动升降电机701,升降电机701转动轴转动带动第一驱动齿轮702转动,通过第一驱动齿轮702转动带动传动链条707转动,进而带动导向齿轮703转动,进而带动第二驱动齿轮704转动,进而,当升降电机701启动时,第一驱动齿轮702以及第二驱动齿轮704同步转动,进而带动升降板3滑动,操作简单方便,且还能够提高升降板3滑动的稳定性。
27.夹持机构5包括安装框506,安装框506上设置有一夹持电机501,夹持电机501转动轴上设置有一正反丝杆502,正反丝杆502转动连接在安装框506内部,正反丝杆502的两端分别螺纹连接有驱动块503,每个驱动块503底部上均设置有夹持板504,两夹持板504上均设置有防滑齿505。
28.优选的,两个夹持板504分别通过驱动块503滑动设置在安装框506底部,使用时,启动夹持电机501,夹持电机501转动轴转动带动正反丝杆502转动,进而带动两个驱动块503相向滑动,进而带动两个夹持板504相向滑动,进而实现加持作业,通过设置防滑齿505,防止物品脱落。
29.旋转机构6包括旋转电机601,旋转电机601上设置有一转动齿轮602,旋转架2底部上设置有一旋转柱8,旋转柱8上设置有齿环603,转动齿轮602与齿环603啮合。
30.优选的,其中旋转机构6包括有旋转电机601,在工作台1上开设有凹槽,旋转电机601安装在凹槽内部,需要进行调节旋转架2的角度时,启动旋转电机601,旋转电机601转动轴转动带动转动齿轮602转动,进而带动齿环603转动,进而带动旋转柱8转动,进而带动旋转架2转动,从而实现对该机械手的角度进行调节。
31.安装架4底部开设有滑槽401,安装架4内部设置有一电动推杆402,电动推杆402设置有一安装块403,安装块403与安装框506固定连接。
32.优选的,在安装架4内部设置有电动推杆402,通过电动推杆402带动安装块403滑动,进而带动夹持机构5滑动,便于根据工作环境所需进行调节夹持机构5的位置,进一步提高该机械手的实用性。
33.旋转架2远离升降板3的一端设置有配重块9。
34.优选的,通过在旋转架2远离升降板3的一端设置有配重块9,提高该机械手使用时的安全性。
35.以上只通过说明的方式描述了本实用新型的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本实用新型权利要求保护范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1