扳手的制作方法
1.本实用新型涉及一种扳手,特别涉及一种在骨科手术中使用的扳手。
背景技术:
2.在骨科手术中,常使用接骨螺钉作为植入物或通过固定其他植入物来共同作为内固定系统。接骨螺钉按牙型等可分为皮质骨螺钉和松质骨螺钉;按结构可分为锁定螺钉和非锁定螺钉;另外还可分为实心螺钉和空心螺钉等。接骨螺钉是最为常见的骨科植入物耗材,目前一般通过与接骨螺钉的轴线相平行的工具的旋转力,驱使接骨螺钉转动,从而使接骨螺钉沿着螺纹旋转方向植入人体。这种与接骨螺钉轴线相平行的工具,一般称之为螺钉“起子”。但是在一些相对封闭、复杂的骨科手术环境里,这种工具操作起来非常困难,如盆腔附近的骨科手术,因为这种轴线平行的工具需要较大的操作空间,同时由于盆腔组织的影响,对力的感知也相对困难。此时,往往需要借助于其他工具,做大面积的牵拉,才能有效的完成手术操作;这对盆腔组织是一种损伤,也增加了医生的工作负担。
技术实现要素:
3.为了解决现有技术中的技术问题,本实用新型的目的在于提供一种扳手,能够在相对封闭或空间有限的骨科手术环境中操作,并可省去额外牵拉组织或器官的操作,以此避免对组织或器官的影响,同时减轻医生的工作负担,提高手术效率。
4.为实现上述目的,本实用新型提供了一种扳手,用于旋转骨科固定件,以将所述骨科固定件植入目标位置,包括:
5.手柄;
6.与所述骨科固定件相接合用的转动结构;所述转动结构可转动地设置在所述手柄的远端;所述转动结构的转动轴与所述手柄互成角度;以及,
7.用于驱动所述转动结构仅朝一个预定方向转动的弹性结构;所述弹性结构的近端与所述手柄连接;所述弹性结构能够在所述手柄朝所述预定方向转动时,远端与所述转动结构传动连接。
8.可选地,所述转动结构的转动轴与所述手柄之间的相对角度为90
°
。
9.可选地,所述手柄能够限制所述弹性结构朝所述预定方向转动时的最大位置;所述手柄还能够限制所述弹性结构朝与所述预定方向相反的方向转动时的最大位置。
10.可选地,所述手柄的内部设置有正向限位腔和反向限位腔;所述正向限位腔和所述反向限位腔设置在所述弹性结构的相对两侧;所述正向限位腔能够限制所述弹性结构朝所述预定方向转动时的最大位置;所述反向限位腔能够限制所述弹性结构朝与所述预定方向相反的方向转动时的最大位置。
11.可选地,所述弹性结构的远端具有相对设置的直线结构和斜线结构;所述转动结构具有齿槽,所述齿槽具有相对设置的工作面和非工作面;
12.当所述手柄正向转动时,所述直线结构与所述工作面抵接,所述弹性结构与所述
转动结构保持相对静止;
13.当所述手柄反向转动时,所述斜线结构与所述非工作面抵接,所述弹性结构与所述转动结构能够相对活动。
14.可选地,所述转动结构为棘轮,所述弹性结构为棘爪。
15.可选地,所述转动结构包括转动本体以及与所述转动本体同轴设置的连接头,所述转动本体能够与所述弹性结构传动连接,所述连接头用于与所述骨科固定件相接合。
16.可选地,所述手柄具有镂空槽,所述镂空槽将所述手柄分割为第一部分和第二部分,所述第一部分用于受力相对于所述第二部分转动。
17.可选地,所述第一部分的近端设置有握持部,所述握持部延伸超过所述第二部分的近端,所述握持部的握持面为内凹的弧面。
18.可选地,所述第一部分上设置有弧形指示部,所述弧形指示部沿延伸方向设置有对应于力矩的刻度线,且所述弧形指示部位于所述第二部分的近端和所述握持部的远端之间;所述第二部分上设置有指示所述刻度线用的指针。
19.上述扳手能够与骨科固定件配合,以驱动骨科固定件转动,从而将骨科固定件植入体内。在实施时,通过与骨科固定件的轴线互成角度的手柄来施加扭力,该手柄的操作空间能够避开大量肌肉组织和内脏组织,从而解决在相对封闭或空间有限的骨科手术环境里植入骨科固定件的问题,使医生更方便操作,降低操作风险,也降低医生对手术操作的要求,提高手术成功率。
附图说明
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
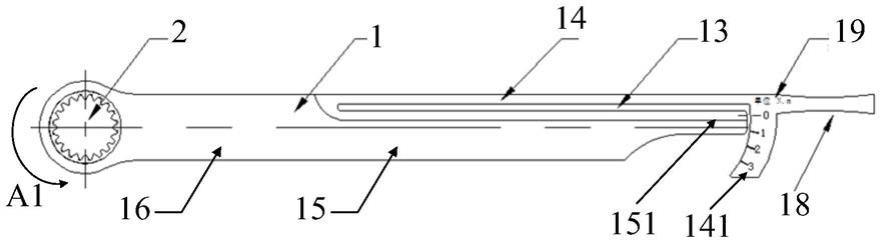
21.图1是根据本实用新型优选实施例的扳手的俯视结构示意图;
22.图2是根据本实用新型优选实施例的扳手的主视结构示意图;
23.图3是根据本实用新型优选实施例的扳手的远端的结构示意图;
24.图4是根据本实用新型优选实施例的转动结构的主视图;
25.图5是图4所示的转动结构的俯视图。
26.图中:1-手柄;101-正向限位腔;102-反向限位腔;11-第一内腔;12-第二内腔;13-镂空槽;14-第一部分;141-弧形指示部;15-第二部分;151-指针;16-基部;17-下沉台阶;18-握持部;19-刻度线;2-转动结构;21-转动本体;22-连接头;3-弹性结构;31-弹片结构;311-直线结构;312-斜线结构;4-限位螺钉。
具体实施方式
27.为使本实用新型的内容更加清楚易懂,以下结合说明书附图对本实用新型做进一步说明。当然本实用新型并不局限于该具体实施例,本领域的技术人员所熟知的一般替换也涵盖在本实用新型的保护范围内。其次,本实用新型利用示意图进行了详细的描述,但这些示意图仅为了便于说明本实用新型优选实施例,不应对此作为本实用新型的限定。
28.另外,以下说明内容的各个实施例分别具有一或多个技术特征,然此并不意味着使用本实用新型者必需同时实施任一实施例中的所有技术特征,或仅能分开实施不同实施例中的一部或全部技术特征。换句话说,在实施为可能的前提下,本领域技术人员可依据本实用新型的公开内容,并视设计规范或实际需求,选择性地实施任一实施例中部分或全部的技术特征,或者选择性地实施多个实施例中部分或全部的技术特征的组合,借此增加本实用新型实施时的弹性。
29.如在本说明书中所使用的,单数形式“一”、“一个”以及“该”包括复数对象,除非内容另外明确指出外。如在本说明书中所使用的,术语“或”通常是以包括“和/或”的含义而进行使用的,除非内容另外明确指出外。如在本说明书中所使用的,术语“若干”是指数量不确定的含义,除非内容另外明确指出外。如在本说明书中所使用的,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者至少两个该特征。如在本说明书中所使用的,术语“远端”指的是靠近人体的一端;术语“近端”指的是远离人体的一端。
30.为了解决现有技术中植入例如接骨螺钉等骨科固定件所存在的技术问题,本实用新型的核心思路提供了一种扳手,可以有效的避开大量肌肉组织和内脏组织,从而在相对封闭或空间有限的骨科手术环境中操作,无需其他工具对组织或器官进行牵拉,降低对组织或器官的影响,也减轻医生的工作负担,提高手术效率。
31.本实用新型提供的扳手能够与骨科固定件配合,以驱动所述骨科固定件转动,从而将所述骨科固定件旋入体内。在实施时,所述扳手的远端提供连接头,能够与骨科固定件上的接口配合连接。但是所述骨科固定件包括但不限于为接骨螺钉,还有可能是其他需要通过旋转力才能植入人体的骨科固定件。
32.以下结合附图以及优选实施例对本实用新型提出的扳手作进一步的说明。而且在不冲突的情况下,下述的实施方式及实施方式中的特征可以相互补充或相互组合。
33.如图1至图3所示,本实施例提供一种扳手,包括手柄1、转动结构2和弹性结构3。所述转动结构2可转动地设置在手柄1的远端。所述弹性结构3的近端与手柄1连接,可选地,弹性结构3固定设置在手柄1内。所述弹性结构3能够提供弹性力,但其结构不作限定,如不限于为片状的弹性体,还可以是杆状或丝状的弹性体等。所述弹性结构3能够跟随手柄1的转动而转动。且所述弹性结构3能够在手柄1朝预定方向转动时,远端与转动结构2传动连接,以驱动转动结构2仅朝一个所述预定方向转动,如只能朝图1中的逆时针方向a1转动。通过转动结构2朝预定方向的转动而驱动骨科固定件旋入人体。
34.其中所述转动结构2的转动轴与骨科固定件的轴线可以重合或不重合,也即,本技术不限定转动结构2的转动轴必须与骨科固定件的轴线重合,实际手术过程中,也允许转动结构2的转动轴偏离骨科固定件的轴线进行操作。此外,手柄1与转动结构2的转动轴互成角度,即经过手柄1轴线的平面与转动结构2的转动轴既不平行,也不重合。因此,通过与骨科固定件的轴线互成角度的手柄1的旋转力来驱使骨科固定件转动而植入人体。这里的互成角度不包括0
°
和180
°
。还需理解的是,手柄1的形状不固定,如不限定为直线型手柄结构,还可以是非直线形的手柄结构。
35.以所述预定方向为逆时针方向a1(即正向)作为示意,使用时,当手柄1受力朝逆时
针方向a1摆动时,弹性结构3也因手柄1的摆动而逆时针转动,此时,弹性结构3的远端与转动结构2之间处于传动连接的状态(即两者相对静止),使得弹性结构3在手柄1的驱动下能够带动转动结构2朝逆时针方向a1转动,继而转动结构2带动骨科固定件朝逆时针方向旋转而植入人体;反之,当手柄1受力朝顺时针方向摆动时,弹性结构3虽因手柄1的摆动而顺时针转动,但此时,弹性结构3的远端与转动结构3之间处于“无效连接”的状态(即两者能够相对运动),使得弹性结构3在手柄1的驱动下无法带动转动结构2朝顺时针方向转动,此时的转动结构2保持静止不动。如此配置,使与骨科固定件的轴线互成角度的手柄1的操作空间能够避开大量肌肉组织和内脏组织,从而解决在相对封闭或空间有限的手术环境里植入骨科固定件的问题,使医生更方便操作,降低操作风险,也降低医生对手术操作的要求,提高手术成功率。
36.在优选实施例中,所述手柄1与转动结构2的转动轴之间的相对角度为90
°
,此时操作更为省力。所需理解的是,“手柄1与转动结构2的转动轴之间的相对角度为90
°”
指的是,转动结构2的旋转轴垂直于经过手柄1轴线的平面。
37.可以理解,所述弹性结构3既能够驱动转动结构2朝所述预定方向转动,且还能够限制转动结构2朝与所述预定方向相反的方向的转动。此时,所述弹性结构3既能够驱动转动结构2转动,又能够反方向锁定转动结构2。如此构造,仅一个弹性结构3便能实现两种功能,使扳手的结构更简单,使用更方便。
38.本示例中,所述手柄1能够限制弹性结构3朝所述预定方向转动时的最大位置;所述手柄1还能够限制弹性结构3朝与所述预定方向相反的方向转动时的最大位置。因此,只要对弹性结构3的两个方向的形变进行限位,即可限制弹性结构3的转动位置。
39.如图3所示,在一示例中,所述手柄1的内部设置有正向限位腔101和反向限位腔102,所述正向限位腔101和反向限位腔102设置在弹性结构3的相对两侧。所述正向限位腔101能够限制弹性结构3朝所述预定方向转动时的最大位置;所述反向限位腔102能够限制弹性结构3朝与所述预定方向相反的方向转动时的最大位置。因此,通过调整正向限位腔101和反向限位腔102的大小来控制弹性结构3的活动空间即可。具体地,如图3所示,在垂直于图面的方向看,在弹性结构3上部的空腔定义为正向限位腔101,在弹性结构3下部的空腔定义为反向限位腔102,显然,所述正向限位腔101的大小远大于反向限位腔102,也就说,反向限位腔102几乎很小以阻止反向的转动。由于弹性结构3的反向转动的空间很小,故而转动结构2的反向转动也被想限制。
40.继续参阅图3,所述弹性结构3可被配置为弹片结构31,弹片结构31通过限位螺钉4固定在手柄1的第一内腔11中。限位螺钉4对弹片结构31的位置进行限制和保护,使弹片结构31的活动范围得以控制。
41.在一示例中,所述弹片结构31的远端具有相对设置的直线结构311和斜线结构312,同时所述转动结构2具有齿槽a,所述齿槽a具有相对设置的工作面和非工作面。当所述手柄1正向转动时,直线结构311与转动结构2上的齿槽a的工作面抵接,所述弹性结构3与转动结构2建立传动连接关系,而保持相对静止;当所述手柄1反向转动时,斜线结构312与转动结构2上的齿槽a的非工作面抵接,所述弹性结构3与转动结构2没有传动连接关系,两者能够相对活动。因此,当直线结构311与转动结构2的齿槽a的工作面抵接时,两者形成啮合传动关系,两者不会产生相对运动,使弹性结构3能够推动转动结构2逆时针方向转动;而当
斜线结构312与转动结构2的齿槽a的非工作面抵接时,两者均为斜面配合,无法形成啮合传动关系,从而产生相对运动,使弹性结构3不能够推动转动结构2顺时针方向转动。可选的,所述弹片结构31的近端为弧形结构。此外,弹片结构31的厚度根据手柄1内的空间来设置即可,因此,本技术对其厚度不加限定。
42.在一具体实施例中,所述转动结构2被配置为棘轮,所述弹性结构3被配置为弹性棘爪,由弹性棘爪推动棘轮作步进运动。通过棘轮与弹性棘爪的啮合运动,保证了棘轮只能向一个方向旋转,而不能倒转。如当手柄1逆时针摆动时,驱动弹性棘爪插入棘轮的齿槽中,推动棘轮转过一个角度;当手柄1顺时针摆动时,弹性棘爪却能够在棘轮的齿背上滑过,故棘轮静止不动。如此配置,当手柄1连续的往复摆动时,转动结构2便作单向的间歇运动,而轮齿式棘轮机构的结构简单,制造方便,工作可靠。优选的,所述弹性结构3既可充当驱动棘爪,又可充当止动爪。
43.本技术对转动结构2上的齿槽a的数量不作限定,只要根据实际转动角度需要设定即可。如所述转动结构2可具有10~50个具有相同结构的齿槽a,从而通过与弹簧结构3的啮合产生对旋转力的控制。而且所述转动结构2上的齿槽a可以连续一圈设置,也可以少于一圈设置。
44.参阅图2、图4和图5,在一具体实施例中,所述转动结构2包括转动本体21和与转动本体21同轴设置的连接头22,所述转动本体21用于与弹性结构3传动连接,所述连接头22用于与骨科固定件相接合。如所述转动本体21可为棘轮。所述连接头22的结构根据骨科固定件上的接口的结构来对应设置,如三边形连接头,四边形连接头,梅花形连接头,六边形连接头,五边形连接头等。所述连接头22可与转动本体21一体制作成型或分体制作成型。
45.参阅图3,在一具体实施例中,所述手柄1的远端设置有一端开口的第二内腔12。所述转动本体21可转动地设置在第二内腔12内,且所述连接头22设置在第二内腔12外。如前所述,所述手柄的近端还设置有第一内腔11,第二内腔12与第一内腔11连通,以便弹性结构3的一端能够插入第二内腔12与转动本体21传动连接。
46.参阅图1,所述手柄1优选为弹性手柄,即手柄1自身有弹性,以使操作更为轻松和省力。在一具体实施例中,所述手柄1具有镂空槽13,镂空槽13将手柄1分割为第一部分14和第二部分15,并扳动第一部分14朝预定方向转动来驱使手柄1转动。第一部分14类似于弹簧片,能够借助于自身的弹性恢复至初始状态。但是第一部分14和第二部分15在远端共有一个基部16,所述基部16用于安装转动结构2。参阅图2,为了避免第一部分14过于锋利而划破医生的手套,所述第一部分14上设置有下沉台阶17,所述下沉台阶17对称设置在第一部分14的上下两侧。
47.参阅图1,为了方便握持,所述第一部分14的近端进一步设置有握持部18,该握持部18延伸超过第二部分15的近端。优选的,所述握持部18的握持面为内凹的弧面,使医生更加容易、牢固的握持。
48.进一步地,所述第一部分14上设置有对应于力矩的刻度线19,用于指示力矩的大小,以便于医生直接感知作用在骨科固定件上的力矩的大小,以更精确地控制骨科固定件旋入的扭矩,既可降低对人体的损伤,又能提高手术的精准性。如可在第一部分14上设置弧形指示部141,弧形指示部141沿着延伸方向设置对应于力矩的刻度线19,所述弧形指示部181位于第二部分15的近端和握持部18的远端之间。可选地,刻度线19的旁边刻印力矩的单
位n.m。而在其他实施例中,也可取消对应力矩的刻度线,而是医生根据镂空槽13的大小来感知当前的力矩的大小。进一步地,所述第二部分15上可设置指针151,用于指示刻度线19。
49.所应理解,以上所述,仅为本实用新型的优选实施例,并非对本实用新型任何形式上和实质上的限制,而且本实用新型的创新虽然来源于接骨螺钉植入的技术领域,但本领域的技术人员可以理解,本实用新型的扳手也可应用于其他固定用的骨科植入物的植入。
50.应当指出,对于本技术领域的普通技术人员,在不脱离本实用新型的前提下,还将可以做出若干改进和补充,这些改进和补充也应视为本实用新型的保护范围。凡熟悉本专业的技术人员,在不脱离本实用新型的精神和范围的情况下,当可利用以上所揭示的技术内容而做出的些许更动、修饰与演变的等同变化,均为本的等效实施例;同时,凡依据本实用新型的实质技术对上述实施例所作的任何等同变化的更动、修饰与演变,均仍属于本实用新型的技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1