一种一体式背包型侦察机器人的制作方法
1.本实用新型涉及一种一体式背包型侦察机器人。
背景技术:
2.当今,各类突发事件对社会的稳定和人民生命的安全构成了极大的威胁,因此,大力发展面向突发事件的应急装备意义重大,故侦察机器人应运而生。当侦察环境复杂时,大型的侦察机器人很难进行作业,小型化、易携带的侦察机器人能更好的满足侦察需求。传统的背包侦察机器人虽然体型小,易携带,但是在作业前需要把机器人从背包中取出,再进行组装,准备过程极为麻烦。所以需要对背包侦察机器人的便捷性进行改进,使其更方便操作。
技术实现要素:
3.为解决上述技术问题,本实用新型提供一种一体式背包型侦察机器人。
4.本实用新型采用以下技术方案
5.一种一体式背包型侦察机器人,包括机器人主体,所述机器人主体设有外壳,所述外壳设有背包带和卡扣,所述背包带一端和所述外壳固定连接,所述背包带的另一端和所述卡扣连接,所述机器人主体底部设有底盘,所述底盘设有行走机构,所述行走机构在所述外壳外,所述行走机构和所述底盘可拆卸的连接。
6.可选地,所述外壳顶部设有用于透出升降云台的开口,所述开口设有滑动门,所述滑动门和所述开口活动的连接。
7.可选地,所述滑动门和所述开口滑动的连接。
8.可选地,所述开口处固定有第一滑槽、第二滑槽,所述第一滑槽和所述第二滑槽相对设置,所述滑动门包括活动板,所述活动板设于所述第一滑槽和所述第二滑槽之间。
9.可选地,所述滑动门还包括小钢球,所述小钢球设于所述活动板侧边,所述活动板通过所述小钢球和所述第一滑槽连接,所述活动板通过所述小钢球和所述第二滑槽连接。
10.可选地,所述外壳设有用于遮盖开口的盖板,所述盖板可相对所述外壳翻转,所述盖板和所述外壳之间设有锁定机构。
11.可选地,所述锁定机构包括拉头、设于所述外壳的第一链牙和设于所述盖板边缘的第二链牙,所述拉头连接所述第一链牙和所述第二链牙,所述第一链牙和所述第二链牙可相互啮合。
12.可选地,所述外壳内设有容置空间,所述容置空间内设有电动推杆,所述电动推杆设于所述底盘,所述电动推杆上设有升降云台,所述升降云台包括升降台和云台相机,所述云台相机设于升降台的顶部。
13.可选地,所述底盘设有用于供电的电池仓,所述电池仓顶部固定有控制模块。
14.可选地,所述行走机构为履带式行走机构,所述行走机构通过锁固机构可拆卸的安装在所述底盘上。
15.可选地,所述锁固机构和所述底盘固定连接,所述行走机构固定连接有连接轴,所述行走机构通过连接轴和所述锁固机构连接。
16.可选地,所述锁固机构包括锁箍环、拨件和锁固轴,所述锁箍环为具有断口的锁箍环,所述断口两端设有向外延伸的锁固部,两所述锁固部和所述锁箍环一体设置,所述锁固轴穿过两所述锁固部,所述锁固轴一端设有防脱部,所述锁固轴另一端和拨件的偏心处铰接,所述拨件旋转固定角度后,所述拨件和所述锁固部抵触。
17.可选地,所述锁固部设有卡凹,所述拨件设有和所述卡凹配合的卡凸,所述拨件旋转固定角度后卡凸在卡凹内。
18.可选地,所述行走机构包括履带、与履带啮合的主动轮、支撑轮和支架,所述底盘设有用于驱动主动轮的驱动电机,所述支撑轮和主动轮均可转动的设于所述支架,所述支撑轮和所述履带接触。
19.可选地,所述支架和所述底盘可拆卸的连接,和/或,所述主动轮和所述驱动电机可拆卸的连接。
20.可选地,所述行走机构大致为三角形结构,所述行走机构一端的宽度大于另一端的宽度。
21.可选地,所述履带接触地面的一面设有防滑筋或者花纹。
22.可选地,所述外壳设有履带收纳盒,履带收纳盒里设有用于固定履带的固定装置。
23.可选地,所述履带收纳盒里设有用于固定履带的卡扣。
24.采用本实用新型提供的技术方案,与现有技术相比,具有如下有益效果:
25.本实用新型提供的一种一体式背包型侦察机器人,它将背包和机器人设置为一体结构,使侦察机器人的运输便捷,侦察前的准备工作简单,进而提高了侦察机器人的工作效率。
附图说明
26.图1为本实用新型侦察机器人去掉外壳的示意图;
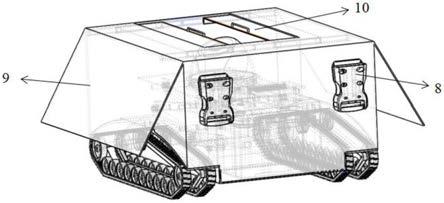
27.图2为本实用新型侦察机器人具有外壳的示意图;
28.图3为本实用新型外壳开口打开的示意图;
29.图4为本实用新型滑动门和滑槽配合的示意图;
30.图5为本实用新型滑动门和滑槽配合的局部示意图;
31.图6为本实用新型锁固机构的示意图;
32.图7为行走机构的示意图;
33.图8为履带收纳盒的示意图。
34.示意图中的标号说明:
35.1、底盘;111、锁箍环;1111、断口;1112、锁固部;1113、卡凹;112、拨件;1121、卡凸;113、锁固轴;1131、防脱部;2、行走机构;21、履带;211、防滑筋;22、主动轮; 221、第一齿;23、支撑轮;24、支架;25、诱导轮;3、升降云台;301、云台相机;302、升降台;303、电动推杆;4、电池仓;5、外壳;51、履带收纳盒;6、控制模块;7、背包带; 8、卡扣;9、盖板;10、滑动门;1001、第一滑槽;1002、第二滑槽;1003、第一活动板; 1004、第二活动板;1005、小钢球。
具体实施方式
36.为进一步了解本实用新型的内容,结合附图1-8及实施例对本实用新型作详细描述。
37.结合附图1-8,本实施例的一种一体式背包型侦察机器人,包括机器人主体,机器人主体底部设有底盘1,底盘1左右两侧安装有带轮行走机构2。机器人主体设有外壳5,行走机构2设在外壳5外。
38.外壳5上设置有背包带7、卡扣8、盖板9、滑动门10。卡扣8固定在外壳5前侧,背包带7一端和外壳5固定连接,背包带7另一端和卡扣8连接。盖板9通过铰链和外壳5连接,盖板9和外壳5之间设有锁定机构,锁定机构包括拉头、设于外壳5的第一链牙和设于所述盖板9边缘的第二链牙,拉头连接第一链牙和第二链牙,第一链牙和第二链牙可相互啮合。锁定机构为拉链。锁定机构还可以为卡扣8、纽扣或按扣。盖板9和外壳5用锁定机构连接后,盖板9盖设在外壳5顶部。
39.外壳5顶部设有开口,开口处固定有第一滑槽1001、第二滑槽1002,第一滑槽1001和第二滑槽1002相对设置,滑动门10包括活动板,活动板设于第一滑槽1001和第二滑槽1002 之间。滑动门10还包括小钢球1005,小钢球1005设于活动板侧边,活动板通过小钢球1005 和第一滑槽1001滑动的连接,活动板通过小钢球1005和第二滑槽1002滑动的连接。
40.本实施例中,活动板包括第一活动板1003和第二活动板1004,第一活动板1003和第二活动板1004相对远离会打开开口,第一活动板1003和第二活动板1004相对靠近会关闭开口。
41.外壳5内设有容置空间,容置空间内设有电动推杆303,电动推杆303设于机器人底盘1,电动推杆303上设有升降云台3,升降云台3包括升降台302和云台相机301,云台相机301 设于升降台302的顶部。具体应用时,升降台302为剪叉式升降台302。机器人底盘1设有用于供电的电池仓4,电池仓4内设置有可拆卸式的电池模组,提高了机器人的工作效率。电池仓4顶部固定有控制模块6,控制模块6包括云台数据的远程无线传输和机器人的运动控制。
42.在侦察作业前,升降云台3收缩将云台隐藏到外壳5内部,滑动门10关闭,盖板9收紧拉链覆盖在机器人上。操作人员通过背包带7将机器人运输到待侦察的地点。在侦察作业时,盖板9拉开拉链移动到外壳5两侧,背包带7通过卡扣8收紧,打开滑动门10,升降云台3 上升至开口外,进行侦察作业。
43.行走机构2为履带式行走机构2,行走机构2包括履带21、主动轮22、诱导轮25、支撑轮23和支架24。底盘1设有用于驱动主动轮22的驱动电机。主动轮22、诱导轮25和支撑轮23均可转动的安装于支架24。主动轮22设有第一齿221,履带21设有第二齿,第一齿 221和第二齿啮合。诱导轮25设有两个,设于支架24的左右两端,用于引导支撑履带21的左右两端。支撑轮23设有多个,设于支架24的底部,支撑轮23和履带21接触,用于支撑履带21。主动轮22安装于支架24的上部。
44.主动轮22、诱导轮25和支撑轮23的支撑作用,使行走机构2大致为三角形的形状,并且行走机构2一端的宽度大于另一端的宽度。履带21接触地面的一面设有防滑筋211或者花纹。
45.行走机构2和底盘1可拆卸的连接,行走机构2设有连接轴,底盘1固定连接有锁固
机构11,行走机构2通过连接轴和锁固机构11配合连接。锁固机构11包括锁箍环111、拨件 112和锁固轴113,锁箍环111为具有断口1111的锁箍环111,断口1111两端设有向外延伸的锁固部1112,两锁固部1112和锁箍环111一体设置,锁固轴113穿过两锁固部1112,锁固轴113一端设有防脱部1131,锁固轴113另一端和拨件112的偏心处铰接,拨件112旋转固定角度后,拨件112和锁固部1112抵触。拨件112固定连接有拨把,拨动拨件112时,可以通过拨把使拨件112旋转。具体应用时,将连接轴设在锁箍环111内,然后拨动拨把,使拨件112旋转固定角度。拨件112旋转固定角度后,拨件112距离锁固轴113和拨件112的铰接点最远处和锁固部1112抵触,使断口1111压缩,使锁箍环111内圈变小以锁紧连接轴。具体应用时,连接轴设于支架24和/或主动轮22。连接轴设于主动轮22时,锁固机构11固定连接在驱动电机的输出轴上,锁固机构11将输出轴和连接轴锁定在一起。锁固部1112设有卡凹1113,拨件112设有和卡凹1113配合的卡凸1121,拨件112旋转固定角度后卡凸1121 在卡凹1113内。拨件112距离锁固轴113和拨件112的铰接点最远处和锁固部1112抵触时,卡凸1121和卡凹1113卡接。
46.外壳5设有履带收纳盒51,履带收纳盒51里设有用于固定履带21的固定装置,履带收纳盒51里设有用于固定履带21的卡扣,履带21通过卡扣和履带收纳盒51可拆卸的连接。
47.在其他实施方式中,背包带7设在机器人底盘1上,底盘1设有硅胶或海绵之类的柔性材料,以支撑背部,使背部舒适。
48.以上示意性的对本实用新型及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1