一种抓取机械手装置及具有该抓取机械手装置的机器人的制作方法
1.本实用新型属于机械手技术领域,尤其涉及一种抓取机械手装置及具有该抓取机械手装置的机器人。
背景技术:
2.机械手是一种能模仿人手的某些动作功能,按固定程序抓取、搬运物件或操作工具的自动化操作装置。完全按照人手形状设计成的拥有五根手指的灵巧型机械手,这类机械手自由度较多,更灵巧,更接近人手可以协助人完成更复杂的工作。如用于外科手术的感应型仿生机械手臂,可以进行远程控制完成手术,作为残疾人和瘫痪人员的假肢,帮助病人生活自理。因此,仿人手五指机械手用途、意义重大,一直是仿生机器人研究的重点。现有技术中,机械手有通过传送带与带轮进行动力传递连接的结构,传送带与带轮之间属于软连接,在带轮转动的过程中不容易出现打滑,且传送带本身易变形,这都使得利用带轮转动角度来控制指节的转动角度会出现偏差,无法实现精准控制,另一方面,传送带由于本身的性质在长期的牵引拉伸过程中也易损耗、稳定性能差。
技术实现要素:
3.本实用新型的目的在于克服上述现有技术的不足,提供了一种抓取机械手装置及具有该抓取机械手装置的机器人,其抓取机械手装置的稳定性好,抓取力大,可精准控制各指节的弯曲状态,使用效果佳。
4.本实用新型的技术方案是:一种抓取机械手装置,包括安装板、四指机械手指部件、大拇指机械手指部件和用于驱动所述大拇指机械手指部件相对所述安装板整体偏转的偏转驱动部件,所述四指机械手指部件连接于所述安装板,所述偏转驱动部件连接于所述安装板和所述大拇指机械手指部件;
5.所述四指机械手指部件包括第一动力器件、具有第一弧形槽且固定连接于所述安装板的第一连接座、连接于所述第一连接座且可沿所述第一弧形槽滑动的第一近指、连接于所述第一近指的第一中指和连接于所述第一中指的第一远指;所述四指机械手指部件还包括连接于所述第一动力器件、所述第一连接座、所述第一中指的第一连杆机构和连接于第一连杆机构、所述第一中指和所述第一远指的第二连杆机构;
6.所述大拇指机械手指部件包括第二动力器件、具有第二弧形槽的第二连接座、连接于所述第二连接座且可沿所述第二弧形槽滑动的大拇指近指、连接于所述大拇指近指的大拇指远指,所述第二动力器件、大拇指近指和大拇指远指连接有第三连杆机构,所述第二连接座固定连接有或一体成型有偏转基板,所述偏转驱动部件连接于所述偏转基板。
7.可选地,所述第一连杆机构包括第一杆件、第二杆件和第三杆件,所述第二连杆机构包括第四杆件、第五杆件和第六杆件;
8.所述第一杆件的后端、所述第一近指的后端和所述第一动力器件前端的直线推杆通过第一销轴转动连接;所述第二杆件的后端连接于所述第一连接座,所述第二杆件的前
端、所述第一杆件的前端和所述第三杆件的后端转动连接于所述第四杆件;所述第四杆件的前端和第五杆件的后端转动连接,所述第五杆件的中段转动连接于所述第一中指,所述第五杆件的前端转动连接于所述第六杆件的后端,所述第一远指分别转动连接于所述第六杆件的前端和所述第一中指的前端,所述第一中指的后端还转动连接于所述第一近指的前端以及所述第三杆件的前端。
9.可选地,所述第一连接座包括第一底板和两个相向间隔设置的第一侧板;两个所述第一侧板均设置有所述第一弧形槽;
10.所述第一近指包括位于两个所述第一侧板之间的近指连接杆,所述近指连接杆设置有两个第二连接孔,所述第二连接孔穿设有近指轴,所述近指轴设置有两个且分穿过于所述第二连接孔,近指轴承设置有四个且分别连接于两个所述近指轴的两端,每个所述第一弧形槽内具有两个可沿所述第一弧形槽121滑动的所述近指轴承;
11.所述近指连接杆靠近所述第一动力器件的一端具有近指连接叉,所述第一杆件的后端为第一连接叉,所述第一杆件的前端为第二连接叉;
12.所述第二杆件设置有两根,各所述第一侧板于所述第一弧形槽中部下方处设置有第一连接孔;所述第二杆件设置于所述第一侧板的外侧,且所述第二杆件的后端通过转动销轴转动连接于所述第一连接孔;
13.所述第一连接叉设置于所述近指连接叉内侧,所述直线推杆的前端伸入所述第一连接叉内侧,所述第一销轴穿过所述近指连接叉、所述第一连接叉和所述直线推杆的前端;
14.所述第二连接叉位于所述两根第二杆件之间,所述第三杆件的后端、所述第四杆件的后端位于所述第二连接叉内侧,第二销轴穿过所述第二杆件的前端、所述第二连接叉和所述第三杆件的后端;第三销轴穿过所述第二连接叉、所述第四杆件的后端。
15.可选地,所述第一中指设置有三组连接孔,分别通过销轴连接于所述第一近指的前端、第三杆件的前端和第五杆件的前端。
16.可选地,所述第五杆件呈弧形。
17.可选地,所述第二连接座包括第二底板和两个相向间隔设置的第二侧板;两个所述第二侧板均设置有所述第二弧形槽,所述大拇指近指具有位于两个所述第二侧板之间的大拇指连接杆,
18.所述大拇指连接杆设置有两个第四销轴,各所述第四销轴的两端均设置有第二轴承;每个所述第二弧形槽内具有两个所述第二轴承;所述大拇指连接杆的后端设置有大拇指连接叉,第二动力器件的前端伸入于所述大拇指连接叉之间并通过第五销轴转动连接于所述大拇指连接叉。
19.可选地,所述第三连杆机构包括第七杆件、第八杆件和第九杆件,所述第七杆件的后端、大拇指连接叉与所述第二动力器件的前端转动连接,所述第八杆件的后端连接于所述第二连接座;所述第七杆件的前端、所述第八杆件的前端和所述第九杆件的后端转动连接,所述第九杆件的前端和所述大拇指连接杆的前端分别转动连接于所述大拇指远指。
20.可选地,所述四指机械手指部件设置有四组,每组对应一个独立的所述第一动力器件。
21.可选地,所述偏转驱动部件为旋转舵机;所述旋转舵机具有双头转轴,所述双头转轴连接有u形的转接板,所述大拇指机械手指部件连接于所述转接板。
22.本实用新型还提供了一种机器人,所述机器人具有机械臂,所述机械臂连接有上述的一种抓取机械手装置。
23.本实用新型所提供的一种抓取机械手装置及具有该抓取机械手装置的机器人,其抓取机械手装置的稳定性好,抓取力大,可精准控制各指节的弯曲状态,使用效果佳。
附图说明
24.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
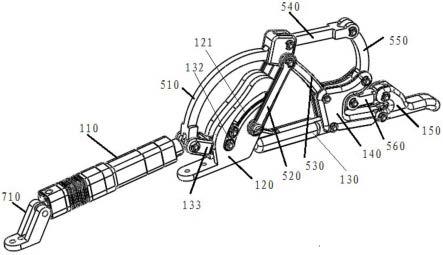
25.图1是本实用新型实施例提供的一种抓取机械手装置的立体示意图;
26.图2是本实用新型实施例提供的一种抓取机械手装置中四指机械手指部件(伸展状态)的立体装配示意图;
27.图3是本实用新型实施例提供的一种抓取机械手装置中四指机械手指部件的立体分解示意图;
28.图4是本实用新型实施例提供的一种抓取机械手装置中大拇指机械手指部件(伸展状态)的立体装配示意图;
29.图5是本实用新型实施例提供的一种抓取机械手装置中大拇指机械手指部件的立体分解示意图;
30.图6是本实用新型实施例提供的一种抓取机械手装置中大拇指机械手指部件活动状态的立体示意图;
31.图7是本实用新型实施例提供的一种抓取机械手装置中四指机械手指部件(收缩握持状态)的立体装配示意图;
32.图8是本实用新型实施例提供的一种抓取机械手装置中大拇指机械手指部件(收缩握持状态)的立体装配示意图;
33.图9是本实用新型实施例提供的一种抓取机械手装置中四指机械手指部件、大拇指机械手指部件(收缩握持过程)的立体装配示意图;
34.图10是本实用新型实施例提供的一种抓取机械手装置中四指机械手指部件、大拇指机械手指部件(收缩握持)的立体装配示意图。
具体实施方式
35.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
36.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者可能同时存在居中元件。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
37.还需要说明的是,本实用新型实施例中的左、右、上、下等方位用语,仅是互为相对概念或是以产品的正常使用状态为参考的,而不应该认为是具有限制性的。
38.如图1至图10所示,本实用新型实施例提供的一种抓取机械手装置,包括安装板410、四指机械手指部件100、大拇指机械手指部件200和用于驱动所述大拇指机械手指部件200相对所述安装板410整体偏转的偏转驱动部件300,其动作仿生性高,可以很好地模拟人手抓握等动作。所述四指机械手指部件100连接于所述安装板410,安装板410可以相当于机械手的掌部,所述偏转驱动部件300连接于所述安装板410和所述大拇指机械手指部件200,可以很好驱动大拇指机械手指部件200相对安装板410整体在一定角度范围内偏转,更好地模拟人手的抓握等动作。各四指机械手指部件100、大拇指机械手指部件200均可以被独立控制。本实施例中,将四指机械手指部件100对应的手指分成三节,靠近手掌的部分称为近指,中间部分称为中指(本实施例中,指手指中的中间指节),远离手掌部分称为远指。所述四指机械手指部件100包括第一动力器件110、具有第一弧形槽121且固定连接于所述安装板410的第一连接座120、连接于所述第一连接座120且可沿所述第一弧形槽121滑动的第一近指130、连接于所述第一近指130的第一中指140和连接于所述第一中指140的第一远指150,第一近指130、第一中指140和第一远指150相当于对应人体的三节指关节,第一近指130、第一中指140和第一远指150可以向安装板410内转动而抓取、握持物体,也可以向外转动而释放物体,安装板410可以连接于机械臂,例如机器人的多轴机械臂;所述四指机械手指部件100还包括连接于所述第一动力器件110、所述第一连接座120、所述第一中指140的第一连杆机构和连接于第一连杆机构、所述第一中指140和所述第一远指150的第二连杆机构,在第一动力器件110动作时,通过第一连杆机构、第二连杆机构的驱动,第一近指130、第一中指140和第一远指150可以像人体手指一样动作,机械手稳定性好,抓取力大,可精准控制手指的弯曲状态。
39.所述大拇指机械手指部件200包括第二动力器件210、具有第二弧形槽221的第二连接座220、连接于所述第二连接座220且可沿所述第二弧形槽221滑动的大拇指近指230、连接于所述大拇指近指230的大拇指远指240,所述第二动力器件210、大拇指近指230和大拇指远指240连接有第三连杆机构,所述第二连接座220固定连接有或一体成型有偏转基板290,所述偏转驱动部件300连接于所述偏转基板290,大拇指机械手指部件200为两个关节运且整个大拇指机械手指部件200可以扭转,其他四个四指机械手指部件100的结构可相同,且为三个关节运动。
40.具体地,所述第一连杆机构包括第一杆件510、第二杆件520和第三杆件530,所述第二连杆机构包括第四杆件540、第五杆件550和第六杆件560;第一杆件510、第二杆件520和第三杆件530、第四杆件540、第五杆件550和第六杆件560可以采用铝合金杆件,其质轻且强度高。
41.具体地,所述第一杆件510的后端、所述第一近指130的后端和所述第一动力器件110前端的直线推杆通过第一销轴611转动连接;所述第二杆件520的后端转动连接于所述第一连接座120,所述述第一杆件510的前端通过第一轴体转动连接于所述第四杆件540的后端,所述第二杆件520的前端、第三杆件530的后端通过第二轴体转动连接于所述第一杆件510的后端;第一轴体、第二轴体相邻。所述第四杆件540的前端和第五杆件550的后端转动连接,所述第五杆件550的中段(靠近前端处)转动连接于所述第一中指140,所述第五杆件550的前端转动连接于所述第六杆件560的后端,所述第一远指150分别转动连接于所述第六杆件560的前端和所述第一中指140的前端,所述第一中指140的后端还转动连接于所
述第一近指130的前端以及所述第三杆件530的前端,结构紧凑且灵活性佳。
42.具体地,所述第一连接座120包括第一底板和两个相向间隔设置的第一侧板;两个所述第一侧板均设置有所述第一弧形槽121。
43.所述第一近指130包括位于两个所述第一侧板之间的近指连接杆131,第一近指130的稳定性佳,抓取机械手装置抓握重物时可靠性佳。所述近指连接杆131设置有两个第二连接孔,所述第二连接孔穿设有近指轴,所述近指轴设置有两个且分穿过于所述第二连接孔,近指轴承132设置有四个且分别连接于两个所述近指轴的两端,每个所述第一弧形槽121内具有两个可沿所述第一弧形槽121滑动的所述近指轴承132,第一近指130可以稳定地沿第一弧形槽121滑动,利于抓取机械手装置抓握重物。
44.具体地,所述近指连接杆131靠近所述第一动力器件110的一端具有近指连接叉133,所述第一杆件510的后端为第一连接叉或设置有第一轴孔,所述第一杆件510的前端为第二连接叉;所述第二杆件520设置有两根,各所述第一侧板于所述第一弧形槽121中部下方处设置有第一连接孔;所述第二杆件520设置于所述第一侧板的外侧,且所述第二杆件520的后端通过转动销轴转动连接于所述第一连接孔;所述第一连接叉设置于所述近指连接叉133内侧,所述直线推杆的前端伸入所述第一连接叉内侧,所述第一销轴611穿过所述近指连接叉133、所述第一连接叉(或第一轴孔)和所述直线推杆的前端;所述第二连接叉位于所述两根第二杆件520之间,所述第三杆件530的后端、所述第四杆件540的后端位于所述第二连接叉内侧,第二销轴612穿过所述第二杆件520的前端、所述第二连接叉和所述第三杆件530的后端;第三销轴613穿过所述第二连接叉、所述第四杆件540的后端,结构可靠性佳。
45.具体地,所述第一中指140设置有三组连接孔,三组连接孔靠近于第一中指140的后端设置,且三组连接孔的中芯不在同一直线上。三组连接孔分别通过销轴连接于所述第一近指130的前端、第三杆件530的前端和第五杆件550的中段,第一中指140可以在第一连杆机构的作用下动作且带动第二连杆机构,使第一远指150动作。
46.具体地,所述第五杆件550可呈弧形。
47.具体地,所述第二连接座220包括第二底板和两个相向间隔设置的第二侧板;两个所述第二侧板均设置有所述第二弧形槽221,所述大拇指近指230具有位于两个所述第二侧板之间的大拇指连接杆231,大拇指近指230的承重性能更佳。
48.具体地,所述大拇指连接杆231设置有两个第四销轴,各所述第四销轴的两端均设置有第二轴承232;每个所述第二弧形槽221内具有两个所述第二轴承232;所述大拇指连接杆231的后端设置有大拇指连接叉233,第二动力器件210的前端伸入于所述大拇指连接叉233之间并通过第五销轴615转动连接于所述大拇指连接叉233,结构紧凑可靠。
49.具体地,所述第三连杆机构包括第七杆件570、第八杆件580和第九杆件590,所述第七杆件570的后端、大拇指连接叉233与所述第二动力器件210的前端转动连接,所述第八杆件580的后端连接于所述第二连接座220;所述第七杆件570的前端、所述第八杆件580的前端和所述第九杆件590的后端转动连接,所述第九杆件590的前端和所述大拇指连接杆231的前端分别转动连接于所述大拇指远指240,大拇指近指230、大拇指远指240可以可靠地动作。
50.具体地,所述四指机械手指部件100设置有四组,每组对应一个独立的所述第一动
力器件110,第一动力器件110、第二动力器件210可为直线动力器件,如直线推杆(直线电机)等。第一动力器件110的后端可以转动连接于第一座体710,第一座体710可固定于安装板410。第二动力器件210的后端可以转动连接于第二座体720,第二座体720可固定于安装板410或偏转基板290。
51.具体地,所述偏转驱动部件300可为旋转舵机,其控制精度高,且输出扭矩大。
52.具体地,所述旋转舵机具有双头转轴,所述双头转轴连接有u形的转接板310,所述大拇指机械手指部件200的偏转基板290固定连接于所述转接板310,大拇指机械手指部件200可以整体转动,机械手具有较好的抓取、握持能力。
53.本实施例中,第一动力器件110伸长时,带动第一近指130沿着第一弧形槽121进行转动,该第一弧形槽121的圆弧所对应圆心与近指绕着掌部旋转的旋转中心拟合或接近拟合,从而实现第一近指130绕着安装板410(掌部)旋转一定角度;同时,第一动力器件110伸长时,可驱动第一杆件510、第二杆件520、第三杆件530组成的第一连杆机构动作,从而实现第三杆件530驱动第一中指140绕着第一近指130旋转一定角度;同时,第一动力器件110伸长时,可驱动第四杆件540、第五杆件550、第六杆件560组成的第二连杆机构工作,从而实现第六杆件560驱动第一远指150绕着第一中指140旋转一定角度。
54.第二动力器件210伸长时,带动第二近指沿着第二弧形槽221进行转动,该开槽导轨轨迹的中心与近指绕着掌部旋转的旋转中心拟合或接近拟合,从而实现近指绕着掌部旋转一定角度;同时,第二动力器件210伸长时,可驱动第七杆件570、第八杆件580、第九杆件590组成的第三连杆机构工作,从而实现第九杆件590驱动第二远指绕着第二近指旋转一定角度。
55.第一动力器件110、第二动力杆的推杆缩回时,各指节、杆件可以反向动作。
56.本实施例中,大拇指机械手指部件200旋转舵机上的转接板310上,旋转舵机驱动转接板310转动从而带动整个大拇指的转动。
57.本实施例还提供了一种机器人,所述机器人具有机械臂,所述机械臂连接有上述的一种抓取机械手装置,机械臂与安装板410可以固定连接或通过舵机连接。机械臂可为多轴机械臂。
58.本实用新型实施例所提供的一种抓取机械手装置及具有该抓取机械手装置的机器人,其抓取机械手装置的稳定性好,抓取力大,可精准控制各指节的弯曲状态,使用效果佳。
59.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1