被动式触地膝关节外骨骼机器人
1.本实用新型涉及一种被动式触地膝关节外骨骼机器人,具体涉及一种基于弹性杆储能的被动式触地膝关节外骨骼机器人,属于被动下肢外骨骼技术领域。
背景技术:
2.人与动物的根本区别在于人类擅长制作并运用工具,外骨骼便是用于拓展人类身体机能和载重能力的工具之一,其相对汽车、高铁、自行车等交通工具的优势在于能够灵活随动于人体的肢体运动,并且能够在包括森林、草地以及沙滩、公路等各种工况条件下为人体提供助力帮助。
3.目前动力外骨骼的发展瓶颈并不在于其核心算法,而是在与外骨骼设计关联度并不大的电源模块,原因是目前电池的密度并不足以满足户外条件下对外骨骼机器人长时间的作业要求,而被动式外骨骼抛弃了这一诟病,企图以对人体自身能量的更加合理化分配完成对人体肢体的运动帮助。目前大多数被动式外骨骼实现的功能更偏向于辅助分担人体携带的负重,当牵扯到助力功能时则有些牵强,同时被动式外骨骼相对动力外骨骼的另一优势在于轻巧和灵活,然而目前有些被动机构并没有在此方面有太多体现。
技术实现要素:
4.本实用新型提供一种被动式触地膝关节外骨骼机器人,该装置结构简单,体型轻巧,穿戴方便,稳定可靠,工作原理合理,助力明显。
5.为实现上述目的,本实用新型采取以下技术方案:
6.一种被动式触地膝关节外骨骼机器人,包括如下部件:
7.大腿机构,包括大腿杆;
8.膝关节储能机构,包括膝关节组件、弹性杆和脚部组件,所述弹性杆的上端与所述膝关节组件连接,所述弹性杆的下端与所述脚部组件连接,所述膝关节组件与所大腿杆的下端连接,所述膝关节储能机构用于存储和释放人体在行走过程中的重力势能;
9.小腿机构,包括小腿杆,所述小腿杆的上下两端分别与所述膝关节组件、所述脚部组件连接。
10.所述的被动式触地膝关节外骨骼机器人,优选地,所述膝关节组件包括膝关节外端盖以及与其连接的膝关节内端盖,二者之间形成空腔,空腔内装配有深沟球轴承、凸轮和膝关节凸轮杆,所述深沟球轴承和所述凸轮共同组成旋转副,所述凸轮与所述大腿杆的下端连接,所述凸轮和所述膝关节凸轮杆共同组成凸轮副。
11.所述的被动式触地膝关节外骨骼机器人,优选地,所述脚部组件包括直线轴承包裹件、脚底推杆和直线轴承,所述脚底推杆的上端通过踝关节接口与所述弹性杆的下端连接,所述直线轴承环套在所述脚底推杆的下端并组成圆柱副,所述脚底推杆的下端与所述直线轴承包裹件连接,所述小腿杆的下端与所述直线轴承包裹件连接。
12.所述的被动式触地膝关节外骨骼机器人,优选地,所述脚部组件还包括鞋套,所述
鞋套通过关节轴承与所述小腿杆连接,所述小腿杆的上端与所述膝关节外端盖的下端连接,所述小腿杆的下端与鞋套连接。
13.所述的被动式触地膝关节外骨骼机器人,优选地,所述弹性杆的上端通过膝关节接口与所述膝关节凸轮杆连接,所述膝关节接口通过圆柱销铰接于所述膝关节凸轮杆的下端。
14.所述的被动式触地膝关节外骨骼机器人,优选地,所述凸轮与所述膝关节凸轮杆之间装配有滚子轴承,用于防止所述膝关节凸轮杆在摆动期内因重力作用而下移导致所述凸轮副之间的间隙过大。
15.所述的被动式触地膝关节外骨骼机器人,优选地,所述膝关节凸轮杆通过两组所述滚子轴承与所述膝关节外端盖相接触,每组包含至少两个所述滚子轴承。
16.所述的被动式触地膝关节外骨骼机器人,优选地,所述脚部组件还包括地面接触圆饼,所述地面接触圆饼装配于所述直线轴承包裹件的下端。
17.所述的被动式触地膝关节外骨骼机器人,优选地,所述大腿机构还包括大腿部固定件,所述大腿部固定件上设置有绑带孔,用于容纳绑带穿过,以将所述大腿杆与人体的大腿捆绑在一起;
18.所述小腿机构还包括小腿部固定件,所述小腿部固定件上亦设置有绑带孔,用于容纳绑带穿过,以将所述小腿杆与人体的小腿捆绑在一起。
19.基于上述被动式触地膝关节外骨骼机器人,本实用新型还提供该机器人的助力方法,包括如下步骤:
20.佩戴所述被动式触地膝关节外骨骼机器人的患者在行走时,当人体支撑腿的脚跟逐渐至完全接触地面的过程中,所述地面接触圆饼和所述脚底推杆相对人体上移压迫所述弹性杆变形,此时所述弹性杆的弯曲程度增加,所述膝关节接口因所述弹性杆的弯曲而相对所述膝关节凸轮杆逆时针旋转,以及所述踝关节接口相对所述脚底推杆上端顺时针旋转,该过程不仅实现所述弹性杆的预变形还对人体及其携带重物降低重力势能的部分进行回收;
21.当人体支撑腿的膝关节进一步后屈时,所述膝关节凸轮杆在所述小腿机构通过所述滚子轴承的作用下绕所述凸轮顺时针滚动,在此过程中由于所述膝关节凸轮杆和所述凸轮接触处的曲率半径不断地增加,所述膝关节凸轮杆下端会相对所述小腿机构下移,同时由于所述地面接触圆饼接触至地面而使得所述脚底推杆的空间位置固定,会进一步导致所述弹性杆的弯曲变形以实现所述被动式触地膝关节外骨骼机器人在人体支撑腿的膝关节后屈时进行储能的目的;
22.当人体支撑腿进一步转化为摆动腿,在脚跟离地过程中,所述脚底推杆对所述弹性杆的压迫逐渐降低,所述弹性杆通过所述脚部组件给予人体一个离地方向的助力补偿,该过程将所述被动式触地膝关节外骨骼机器人回收腿部进入支撑期前人体及其携带重物降低的重力势能部分反馈给人体。
23.本实用新型由于采取以上技术方案,其具有以下优点:
24.1、本实用新型的膝关节储能机构具有离合功能和储能功能,膝关节储能机构利用脚跟触地现象作为离合控制信号,在支撑期利用倒置凸轮副中膝关节凸轮杆位移与弹性杆的压缩量相互转化的方式实现储能,在摆动期解离合时保证外骨骼不对人体膝关节产生明
显干涉。
25.2、本实用新型的膝关节组件中的膝关节凸轮杆通过两组共四个滚子轴承与膝关节外端盖接触,该结构设计的目的是将两者之间复杂的空间接触力化成两个分别在弧矢面和冠状面的分力并由两组轴承分别承担以防止两个构件因接触力复杂而出现卡死现象。
26.3、本实用新型中弹性杆的压缩量可调,因人而异调节膝关节的助力效果,膝关节储能机构能够回收支撑腿落地时下降的重力势能并在支撑腿离地时助力。
27.4、本实用新型装置结构简单,体型轻巧,穿戴方便,稳定可靠,工作原理合理,助力明显。
附图说明
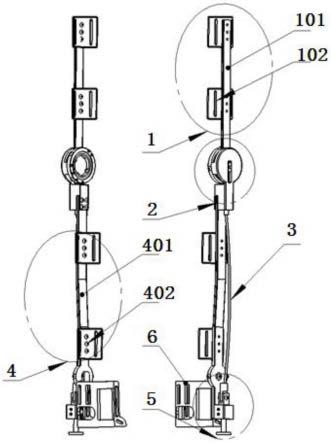
28.图1为本实用新型一实施例提供的被动式触地膝关节外骨骼机器人的整体结构示意图;
29.图2为本实用新型该实施例提供的被动式触地膝关节外骨骼围绕膝关节聚集区(膝关节组件)的构件爆炸图;
30.图3为本实用新型该实施例提供的被动式触地膝关节外骨骼围绕脚部聚集区(脚部组件)的构件爆炸图;
31.图4为本实用新型该实施例提供的被动式触地膝关节外骨骼的爆炸图;
32.图中各标记如下:
33.1-大腿机构,101-大腿杆,102-大腿部固定件;2-膝关节组件;3-弹性杆;4-小腿机构,401-小腿杆,402-小腿部固定件;5-脚部组件;6-鞋套;7-膝关节接口;8-滚子轴承;9-膝关节外端盖;10-赛达螺钉;11-膝关节凸轮杆;12-凸轮;13-深沟球轴承;14-膝关节内端盖;15-内六角平圆头螺钉;16-直线轴承包裹件;17-脚底推杆;18-直线轴承;19-踝关节接口;20-关节轴承;21-螺钉;22-开槽盘头自攻螺钉;23-地面接触圆饼。
具体实施方式
34.为使本实用新型的目的、技术方案和优点更加清楚,下面对本实用新型中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
35.除非另外定义,本实用新型使用的技术术语或者科学术语应当为本实用新型所属领域内具有一般技能的人士所理解的通常意义。本实用新型中使用的“第一”、“第二”、“第三”、“第四”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。
36.如图1所示,本实用新型所提供的被动式触地膝关节外骨骼机器人,包括如下部件:
37.大腿机构1,包括大腿杆101;膝关节储能机构,包括膝关节组件2、弹性杆3和脚部
组件5,弹性杆3的上端与膝关节组件2连接,弹性杆3的下端与脚部组件5连接,膝关节组件2与大腿杆101的下端连接,膝关节储能机构用于存储和释放人体在行走过程中的重力势能;小腿机构4,包括小腿杆401,小腿杆401的上下两端分别与膝关节组件2、脚部组件5连接。本实用新型中的弹性杆3是包括弹簧刚棒、碳纤维杆、高弹性复合材料等其它具备弯曲弹性储能的一切弹性元件。
38.如图1所示,小腿机构4由螺钉实现相互固定的小腿杆401和两个小腿部固定件402组成,绑带穿过两个小腿部固定件402的细长绑带孔将小腿机构4平行绑缚于人体小腿外侧。弹性杆3在弯曲过程中会给凸轮12一个竖直向上的外力,该外力通过深沟球轴承13传递至膝关节内端盖14和膝关节外端盖9的固连体,由于小腿机构4两端连接膝关节外端盖9和鞋套6,该外力将最终经小腿杆401从膝关节外端盖9传递至脚底,通过人体向下踩的方式克服弹性杆3的变形反力,以克服绑带绑缚不牢靠的缺点。
39.如图1所示,大腿机构1由螺钉实现相互固定的大腿杆101和两个大腿部固定件102组成,绑带穿过两个大腿部固定件102的细长绑带孔将大腿机构平行绑缚于人体大腿外侧,大腿杆101下端通过螺钉连接于膝关节组件2中的凸轮12,目的是保持凸轮12、大腿机构1以及人体大腿的相互固定。
40.如图2所示,膝关节储能机构中的膝关节组件包括:膝关节接口7、滚子轴承8、膝关节外端盖9、赛达螺钉10、膝关节凸轮杆11、凸轮12、深沟球轴承13、膝关节内端盖14和内六角平圆头螺钉15。凸轮12通过内六角平圆头螺钉15连接于大腿机构1。其在初始工作状态与水平地面呈30度的斜面倾角,膝关节外端盖9和膝关节内端盖14通过内六角平圆头螺钉15连接后固定,深沟球轴承13与凸轮12共同组成旋转副,膝关节接口7铰接于膝关节凸轮杆11下端,通过螺纹与弹性杆3上端连接,凸轮12右侧平面通过内六角平圆头螺钉15固定一个滚子轴承8以防止膝关节凸轮杆11在摆动期内因重力作用而下移导致凸轮副(膝关节凸轮杆11和凸轮12)之间的间隙过大。深沟球轴承13的内径除与凸轮12左侧圆柱过盈配合外,还通过从内向外螺纹旋出凸轮12左侧圆柱的四个内六角平圆头螺钉15挤压在一起以保证构件之间的紧密配合,深沟球轴承13的外径除与膝关节内端盖14间隙配合外还通过由外向内螺纹旋进膝关节内端盖14的四个内六角平圆头螺钉15挤压在一起以保证构件之间的紧密配合,膝关节凸轮杆11通过两组共四个滚子轴承8与膝关节外端盖9接触的目的是将两者复杂的空间接触力化成两个分别在弧矢面和冠状面的分力并由两组轴承分别承担以防止两个构件因接触力复杂而出现卡死现象。
41.如图3所示,膝关节储能机构中的脚部组件包括:直线轴承包裹件16、脚底推杆17、直线轴承18、踝关节接口19以及地面接触圆饼23。踝关节接口19铰接于脚底推杆17上端,通过螺纹与弹性杆3下端连接,直线轴承包裹件16通过四个内六角平圆头螺钉15固定于小腿杆401内,通过前后四个开槽盘头自攻螺钉22与直线轴承18固定,进一步通过直线轴承18与脚底推杆17组成圆柱副,地面接触圆饼23通过内六角平圆头螺钉15连接于脚底推杆17;鞋套6通过关节轴承20和三个内六角平圆头螺钉15连接于401小腿内。
42.如图3所示,鞋套6通过关节轴承20连接于小腿杆401,利用绑带绑缚于人体脚部,具体地:在左右前部结构梁、左右前部四分之一突出圆饼状结构和后背部挖出细长绑带孔,在其余位置挖出减重孔。
43.如图3所示,凸轮12右侧平面通过内六角平圆头螺钉15固定一个滚子轴承8,因此
膝关节凸轮杆11在摆动期内下移会受到滚子轴承8的阻碍,这保证凸轮副(膝关节凸轮杆11和凸轮12)之间的间隙不会过大,当人体膝关节进一步前伸结束后,下肢外骨骼伴随人体开始下一步态周期的运作。
44.如图4所示,膝关节储能机构的储能原理是利用倒置凸轮副(膝关节凸轮杆11和凸轮12)中的膝关节凸轮杆11的行程与弹性杆3的竖直压缩量相互转化的方式实现储能。凸轮12通过螺栓连接于大腿杆101,其在初始工作状态下具有一定的斜面倾角,膝关节内外端盖通过螺栓连接后相对固定,通过深沟球轴承13共同与凸轮12组成旋转副,膝关节接口7通过圆柱销铰接于膝关节凸轮杆11下端,通过螺纹与弹性杆3上端连接,踝关节接口19通过螺栓连接铰接于脚底推杆17上端,通过螺纹与弹性杆3下端连接,直线轴承包裹件16通过螺钉固定于小腿杆401,进一步通过直线轴承18与脚底推杆17组成圆柱副,地面接触圆饼23通过沉头螺栓连接于脚底推杆17。
45.另外,膝关节储能机构回收进入支撑期前人体及其携带重物等降低的重力势能部分,并在稍后脚跟离地时通过脚部组件5和弹性杆3给予人体离地方向的助力补偿。具体地,由于大腿机构1和小腿机构4分别通过绑带绑缚于人体的大腿和小腿,膝关节外端盖9和膝关节内端盖14共同与凸轮12的旋转角度将由人体膝关节决定,在支撑腿的脚跟逐渐至完全接触地面的过程中,地面接触圆饼23和脚底推杆17相对人体上移压迫弹性杆3变形,此时弹性杆3的弯曲程度增加,膝关节接口7因弹性杆3的弯曲而相对膝关节凸轮杆11逆时针旋转以及踝关节接口19相对脚底推杆17上端顺时针旋转,该过程不仅实现弹性杆3的预变形还可以对人体及其携带重物等降低重力势能的部分进行回收。
46.如图4所示,支撑腿膝关节进一步后屈时,膝关节凸轮杆11在小腿机构4通过滚子轴承8和赛达螺钉10的作用下会绕凸轮12斜面顺时针滚动,在此过程中由于膝关节凸轮杆11和凸轮12接触处的曲率半径不断地增加,膝关节凸轮杆11下端会相对小腿机构4下移,同时由于因地面接触圆饼23接触至地面而使得脚底推杆17的空间位置固定,会进一步导致弹性杆3的弯曲变形以实现膝关节储能机构在人体支撑腿的膝关节后屈时进行储能的目的。当后续人体支撑腿的膝关节前伸时,膝关节凸轮杆11和凸轮12接触处的曲率半径不断减小,膝关节凸轮杆11同时逐渐减小对弹性杆3的压迫,弹性杆3逐渐恢复至初始变形状态并在此过程中将膝关节后屈时储存的势能反馈于人体,实现膝关节储能机构在人体支撑腿的膝关节前伸时释能的目的。
47.如图4所示,当人体支撑腿进一步转化为摆动腿,在脚跟离地过程中,脚底推杆17对弹性杆3的压迫逐渐降低,弹性杆3通过脚部组件5给予人体一个离地方向的助力补偿,该过程将膝关节储能机构回收腿部进入支撑期前人体及其携带重物等降低的重力势能部分反馈给人体。
48.如图4所示,人体膝关节在摆动期内后屈时,地面接触圆饼23脱离与地面接触而使得脚底推杆17可以沿直线轴承18和直线轴承包裹件16上下滑动,由于重力以及膝关节凸轮杆11和凸轮12接触处的曲率半径不断增加等因素,膝关节凸轮杆11下端相对小腿机构4下移并不会对弹性杆3造成压迫,膝关节凸轮杆11下端的下移运动最终经弹性杆3传递至脚底推杆17沿直线轴承18和直线轴承包裹件16的上下滑动。
49.本实用新型中的膝关节储能机构具有离合功能和储能功能。膝关节储能机构利用脚跟触地现象作为离合控制信号,在支撑期利用倒置凸轮副中膝关节凸轮杆11位移与弹性
杆3的压缩量相互转化的方式实现储能,在摆动期解离合时保证外骨骼不对人体膝关节产生明显干涉。具体而言:膝关节储能机构回收膝关节支撑期内屈曲时的关节负功并转移或补偿于膝关节伸展时的关节正功。另外,膝关节储能机构回收进入支撑期前人体及其携带重物等降低的重力势能部分,并在稍后脚跟离地时给予人体离地方向的助力补偿。
50.膝关节储能机构的离合效果不受人体间运动规律误差的影响。本实用新型中膝关节储能机构的自由度唯一,意味着在确定人体膝关节运动输入的情况下膝关节凸轮副会有唯一的配合状态(尽管在摆动期结束时凸轮副之间会有法线方向的分离,但是其整体位姿方向是始终确定的),因此对于确定的穿戴者而言,膝关节在支撑期确定后屈角度的情况下意味着膝关节凸轮副最终的接触状态是相同的,进一步决定弹性杆3的受压量是一定的,从而能够保证膝关节储能机构最终的助力效果是恒定的,当面对人体运动间不同的运动规律,膝关节储能机构都能保证在支撑期和摆动期之间的离合效果,膝关节进入支撑期时的后屈误差仅决定凸轮副进入支撑期时的位姿状态。
51.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1