一种机器人用灵活转向的转盘结构的制作方法
1.本实用新型涉及一种转盘结构,具体涉及一种机器人用灵活转向的转盘结构。
背景技术:
2.目前,现有的机器人用灵活转向的转盘结构缺少减震装置,当遇到不平整的道路时机器人会受到较为严重的颠簸,而机器人受到较为严重的颠簸会导致机器人的使用寿命降低,而且机器人转盘结构一般只有前面两个转向轮来带动整个机器人转向的,这样虽然使用时比较方便但是不够灵活。
3.故基于上述问题,为此我们设计了这样一种机器人用灵活转向的转盘结构来解决上述问题。
技术实现要素:
4.本实用新型的目的是提供一种机器人用灵活转向的转盘结构,以解决技术中现有的机器人用灵活转向的转盘结构缺少减震装置,当遇到不平整的道路时机器人会受到较为严重的颠簸,而机器人受到较为严重的颠簸会导致机器人的使用寿命降低,而且机器人转盘结构一般只有前面两个转向轮来带动整个机器人转向的,这样虽然使用时比较方便但是不够灵活的问题。
5.为了实现上述目的,本实用新型提供如下技术方案:一种机器人用灵活转向的转盘结构,包括壳体,所述壳体的上端面固定安装有壳盖,所述壳盖的上端面固定安装有支撑平台,所述壳体的下端面四角处均转轴安装有转向轴,所述壳体的下方依次设有四个转动支架,四个所述转动支架分别与四个转向轴的位置相互对应,所述转动支架内均转动安装有转向轮,所述转动支架的上端面均固定安装有缓冲伸缩杆,所述缓冲伸缩杆远离转动支架的一端均与转向轴的下端面固定连接,所述缓冲伸缩杆上均套设有第一缓冲弹簧,所述第一缓冲弹簧的两端分别与转动支架、转向轴固定连接,所述壳体的下端面依次固定安装有两组滑杆,每组所述滑杆均为两个,每组所述滑杆上均滑动安装有安装架,所述安装架内均转动安装有内置轮毂电机的驱动轮,所述安装架上端面两侧分别依次固定安装有多个第二缓冲弹簧,多个所述第二缓冲弹簧远离安装架的一端与壳体的下端面固定连接。
6.优选的,两组所述滑杆的位置相互对应,并且四个所述滑杆的下端面均固定安装有限位块。
7.优选的,所述壳体内侧底端的四角处均转动安装有转动轮,并且四个所述转动轮分别与四个转向轴相连接,四个所述转动轮之间通过皮带相连接,所述壳体内侧底端中部固定安装有驱动电机,所述驱动电机的输出端转动连接有第一连接轴。
8.优选的,一所述转动轮的上端面固定安装有第二连接轴,所述第一连接轴与第二连接轴之间通过皮带连接。
9.优选的,四个所述第一缓冲弹簧与多个第二缓冲弹簧的弹性分别相同。
10.在上述技术方案中,本实用新型提供的技术效果和优点:
11.本实用新型,通过设置转向轴、缓冲伸缩杆、第一缓冲弹簧、滑杆和第二缓冲弹簧,这样在使用该装置时,由于每个转动支架的上端面都转动安装有转向轴,从而使得通过转动转向轴来使四个转向轮都能够转动,当该装置遇到颠簸路段时,该装置上端面的机器人主体会通过向下冲压来缓解颠簸,而机器人主体向下的冲压会使壳体挤压缓冲伸缩杆上套设的第一缓冲弹簧、安装架上端面的第二缓冲弹簧,而第一缓冲弹簧、第二缓冲弹簧受到冲压时会通过挤压自身来缓解受到的冲压,当冲压结束时第一缓冲弹簧、第二缓冲弹簧会通过自身的弹性再次回到原来的位置,相比较传统装置,此装置的增势使得该装置不但可以通过第一缓冲弹簧、第二缓冲弹簧来缓解机器人主体在不平整路段所受到的颠簸,提高了机器主体的使用寿命,而且通过设置四个转向轴,使该装置摆脱了只能通过前置两轮来该变机器的转向,从而使装置的转向更加的灵活。
附图说明
12.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
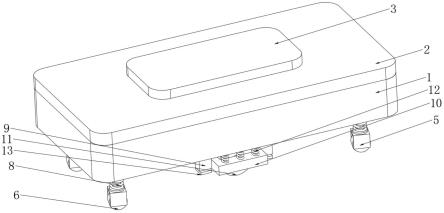
13.图1为本实用新型整体结构示意图。
14.图2为本实用新型壳体与壳盖爆炸图。
15.图3为本实用新型整体结构示意图。
16.图4为本实用新型转动支架与第一缓冲弹簧、缓冲伸缩杆爆炸图。
17.附图标记说明:
18.1、壳体;2、壳盖;3、支撑平台;4、转向轴;5、转动支架; 6、转向轮;7、缓冲伸缩杆;8、第一缓冲弹簧;9、滑杆;10、安装架;11、驱动轮;12、第二缓冲弹簧;13、限位块;14、转动轮;16、第一连接轴;17、驱动电机;19、第二连接轴。
具体实施方式
19.本实用新型提供了如图1-4所示的一种机器人用灵活转向的转盘结构,包括壳体1,所述壳体1的上端面固定安装有壳盖2,所述壳盖2的上端面固定安装有支撑平台3,所述壳体1的下端面四角处均转轴安装有转向轴4,所述壳体1的下方依次设有四个转动支架5,四个所述转动支架5分别与四个转向轴4的位置相互对应,所述转动支架5内均转动安装有转向轮6,所述转动支架5的上端面均固定安装有缓冲伸缩杆7,所述缓冲伸缩杆7远离转动支架5的一端均与转向轴4的下端面固定连接,所述缓冲伸缩杆7上均套设有第一缓冲弹簧8,所述第一缓冲弹簧8的两端分别与转动支架5、转向轴4固定连接,所述壳体1的下端面依次固定安装有两组滑杆9,每组所述滑杆9均为两个,每组所述滑杆9上均滑动安装有安装架10,所述安装架10内均转动安装有内置轮毂电机的驱动轮11,所述安装架10 上端面两侧分别依次固定安装有多个第二缓冲弹簧12,多个所述第二缓冲弹簧12远离安装架10的一端与壳体1的下端面固定连接,相比较传统装置,此装置的增势使得该装置不但可以通过第一缓冲弹簧 8、第二缓冲弹簧12来缓解机器人主体在不平整路段所受到的颠簸,提高了机器主体的使用寿命,而且通过设置四个转向轴4,使该装置摆脱了只能通过前置两轮来该变机器的转向,从而使装置的转向更加的灵活。
20.进一步的,在上述技术方案中,两组所述滑杆9的位置相互对应,并且四个所述滑杆9的下端面均固定安装有限位块13,便于限制安装架10的活动范围,避免安装架10在沿滑杆9上下滑动时脱离了滑杆9。
21.进一步的,在上述技术方案中,所述壳体1内侧底端的四角处均转动安装有转动轮14,并且四个所述转动轮14分别与四个转向轴4相连接,四个所述转动轮14之间通过皮带相连接,所述壳体1内侧底端中部固定安装有驱动电机17,所述驱动电机17的输出端转动连接有第一连接轴16,一所述转动轮14的上端面固定安装有第二连接轴19,所述第一连接轴16与第二连接轴19之间通过皮带连接,便于通过驱动电机17带动第一连接轴16的转动,第一连接轴16的转动带动第二连接轴19的转动,第二连接轴19 的转动带动转向轴4的转动,转向轴4的转动的从而带动转向轮6 的转动,进而完成装置的转向。
22.进一步的,在上述技术方案中,四个所述第一缓冲弹簧8与多个第二缓冲弹簧12的弹性分别相同,便于因弹性不同而导致整个装置的受力缓解不均匀,从而导致装置的缓冲减震效果差。
23.工作原理
24.实施方式具体为:当使用者需要使用该装置时,使用者首先将机器人本体通过支撑平台3固定连接在壳盖2的上端面,在使用该装置时,由于每个转动支架5的上端面都转动安装有转向轴4,从而使得通过转动转向轴4来使四个转向轮6都能够转动,当该装置遇到颠簸路段时,该装置上端面的机器人主体会通过向下冲压来缓解颠簸,而机器人主体向下的冲压会使壳体1挤压缓冲伸缩杆7上套设的第一缓冲弹簧8、安装架10上端面的第二缓冲弹簧12,而第一缓冲弹簧8、第二缓冲弹簧12受到冲压时会通过挤压自身来缓解受到的冲压,当冲压结束时第一缓冲弹簧8、第二缓冲弹簧12会通过自身的弹性再次回到原来的位置,当需要对该装置进行转向时,通过启动驱动电机 17,驱动电机17的启动带动着第一连接轴16的转动,第一连接轴 16的转动带动第二连接轴19,第二连接轴19的转动带动与第二连接轴19固定连接的一转动轮14,由于转动轮14之间通过皮带连接,使得一转动轮14的转动带动这另外三个转动轮14的转动,转动轮 14的转动带动这与之相连接的转向轴4的转动,转向轴4的转动带动着转动支架5的转动,转动支架5的转动带动着转向轮6的转动。以上只通过说明的方式描述了本实用新型的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本实用新型权利要求保护范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1