一种保险杠治具的制作方法
1.本技术涉及保险杠治具技术领域,尤其是涉及一种保险杠治具。
背景技术:
2.保险杠是汽车必不可少的装配部件,在汽车发生碰撞时起到缓冲、吸能作用,能够很好的保护驾驶员和乘员,降低事故损害的程度。
3.在汽车装配过程中,保险杠上需要装配车灯、导流板等相应配件,并且与汽车车体固定时,均需要在保险杠上钻取相应位置的装配孔,以方便装配工序的正常进行。
4.对保险杠进行打孔时,由于保险杠的构造较为复杂,包含各种曲面、斜面等构造面,在对保险杠进行固定时,需要用到治具进行固定支撑,如果保险杠的固定效果较差,位置不稳固,就非常容易导致加工位置的偏移,进而导致加工精度较差,影响后续的装配工序,甚至还会导致残次品的产生,造成生产损失。
技术实现要素:
5.为了提升加工过程中治具对保险杠的支撑稳固度,本技术提供一种保险杠治具。
6.本技术提供的一种保险杠治具采用如下的技术方案:
7.一种保险杠治具,包括底座,所述底座上安装有用于夹持保险杠的夹具、用于支撑固定保险杠的支撑定位机器人;
8.所述支撑定位机器人包括固定设置在底座上的转台、固定在转台上的臂身以及安装在臂身上的固定支撑工装和活动支撑工装;
9.所述支撑定位机器人上还包括有标记识别模块,所述标记识别模块包括:图像采集单元,用于识别保险杠上的定位标记;图像处理单元,用于接收所述图像采集单元输出的图像数据,并识别定位标记输出控制信号以使所述固定支撑工装与活动支撑工装对保险杠支撑固定;供电模块,用于向标记识别模块供电。
10.通过采用上述技术方案,在使用时,先通过夹具将保险杠夹持固定,然后支撑定位机器人上的标记识别模块对保险杠上预先设置的定位标记进行识别,确定支撑位置,图像处理单元对图像采集单元输出的图像数据进行处理,然后输出相应的控制信号,控制转台、臂身移动,以使固定支撑工装和活动支撑工装对保险板的待加工位置进行支撑固定,保证加工精度,降低因保险杠偏移而发生加工失败的几率,提升加工效率。
11.可选的,所述固定支撑工装包括安装板和固定设置在所述安装板上的若干固定支撑柱,所述安装板固定在臂身背离底座的一端,所述固定支撑柱垂直于所述安装板侧壁。
12.通过采用上述技术方案,若干固定支撑柱在臂身的带动下移动至指定位置,然后对保险杠进支撑固定。
13.可选的,所述活动支撑工装包括装配板、若干活动支撑柱和动力件,所述动力件固定在所述臂身背离底座一端,所述装配板与所述动力件的输出轴固定连接,所述活动支撑柱固定设置在所述装配板上,且所述活动支撑柱与所述固定支撑柱平行。
14.通过采用上述技术方案,在使用时,驱动件可以根据控制信号驱动活动支撑柱伸缩,完成对保险杠的支撑和释放,更加方便快捷。
15.可选的,所述活动支撑柱与所述固定支撑柱呈品字形设置。
16.通过采用上述技术方案,品字形设置的活动支撑柱和固定支撑柱能够从三个位置对保险杠进行支撑,三点支撑结构更加稳定牢固,进一步降低保险杠发生偏移的几率。
17.可选的,所述固定支撑柱与所述活动支撑柱的自由端均固定设置有橡胶套。
18.通过采用上述技术方案,橡胶套可以起到缓冲卸力的作用,降低固定支撑柱或活动支撑柱对保险杠产生损害的几率。
19.可选的,所述装配板与所述安装板上均固定设置有若干工业吸盘,所述工业吸盘可与所述保险杠吸附固定。
20.通过采用上述技术方案,工业吸盘可以吸附固定保险杠,协同固定支撑柱和活动支撑柱更好的支撑固定保险杠。
21.可选的,所述图像采集单元设置为摄像头,摄像头固定设置在臂身背离底座的一端,用于采集视频信号并输出信号至图像处理单元,所述图像采集单元串联在供电模块的供电回路内。
22.通过采用上述技术方案,摄像头采集保险杠上定位标记的图像信息,任何经过图像处理单元处理后发出相应的指令,更加智能高效。
23.可选的,所述图像处理单元包括视频解码器和处理子单元,所述视频解码器与摄像头电性连接,用于对摄像头输出的视频信号转换成图像数据并进行储存,所述处理子单元调取图像数据进行识别,并输出驱动信号。
24.通过采用上述技术方案,处理子单元对视频解码器解析出来的图像数据进行分析识别,输出相应的驱动信号控制转台和臂身移动,完成对保险杠的支撑固定。
25.可选的,所述处理子单元包括搭载有图像识别算法的dsp,用于对图像数据进行识别。
26.通过采用上述技术方案,采用图像识别算法对定位标记的图像信息进行分析,提升对保险杠支撑位置的准确性,加工精度更高。
27.可选的,所述夹具包括支撑座、滑动连接在支撑座上的卡块、固定在卡块上的锁紧柱,所述卡块对称设置,所述支撑座上还设置有用于驱动所述卡块相向或相背离移动的驱动件。
28.通过采用上述技术方案,在使用时,驱动件驱动两个卡块相对或相背移动,完成对保险杠的夹持固定。
29.综上所述,本技术包括以下至少一种有益技术效果:
30.1.通过标记识别模块对保险杠上的定位标记进行识别,然后控制转台和臂身移动,使固定支撑工装和活动支撑工装对保险杠相应位置进行支撑固定,提升加工精度;
31.2.通过固定支撑柱和活动支撑柱一同对保险杠进行支撑固定,并协同工业吸盘吸附加固,进一步提高保险杠的位置稳固度,提升加工精度。
附图说明
32.图1是示出保险杠的结构示意图。
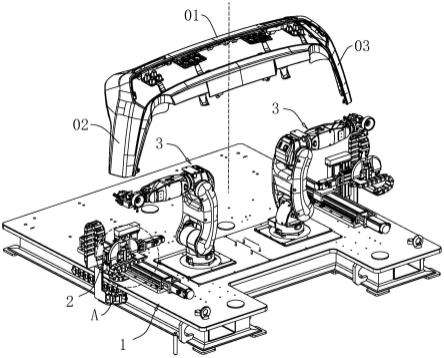
33.图2是示出本技术实施例的整体结构示意图。
34.图3是示出图2中a部分的结构放大示意图。
35.图4是示出本技术实施例支撑定位机器人的整体结构示意图。
36.图5是示出图4中b部分的结构放大示意图。
37.图6是示出本技术实施例标记识别模块的逻辑连接框图。
38.附图标记说明:01、横梁;02、左翼板;03、右翼板;1、底座;2、夹具;21、支撑座;22、卡块;23、锁紧柱;24、驱动件;3、支撑定位机器人;31、转台;32、臂身;33、安装座;34、固定支撑工装;341、安装板;342、连接板;343、固定支撑柱;35、活动支撑工装;351、装配板;352、动力件;353、活动支撑柱;36、工业吸盘;37、橡胶套;4、标记识别模块;41、图像采集单元;411、摄像头;42、图像处理单元;421、视频解码器;422、处理子单元;4221、主处理器;4222、协处理器;423、存储子单元;4231、sdram存储器;4232、ram存储器;424、驱动电路。
具体实施方式
39.以下结合附图1-6对本技术作进一步详细说明。
40.参照图1,保险杠由横梁01、左翼板02和右翼板03组成,左翼板02和右翼板03一体连接在横梁01两端,能够吸收和减缓外界冲击力、防护车身和行人。横梁01上预先设置有定位标记,在加工过程中起到位置定位识别的作用,以提升加工精度。
41.本技术实施例公开一种保险杠治具。参照图2,保险杠治具包括底座1,底座1上安装有夹具2和支撑定位机器人3,夹具2将保险杠的左翼板02和右翼板03均进行夹持固定。然后支撑定位机器人3对保险杠上的定位标记进行识别,接着对保险杠进行支撑固定,协同夹具2以使保险杠在钻孔、切割等加工工序时保持位置固定,提升加工精度和加工效率。
42.参照图2和图3,夹具2包括支撑座21、卡块22和锁紧柱23,支撑座21螺栓固定在底座1上,卡块22设有两个,两个卡块22对称设置。卡块22滑动连接在支撑座21上,支撑座21上还固定有驱动件24,本实施例驱动件24为电动推杆,卡块22与驱动件24的输出轴固定连接,在使用时,驱动件24驱动两个卡块22朝向彼此靠近或远离,以对保险杠进行夹持和释放。
43.参照图2和图4,支撑定位机器人3包括转台31、臂身32、安装座33、固定支撑工装34和活动支撑工装35,转台31螺栓固定在保险杠正下方的底座1上,臂身32安装在转台31上,转台31可以进行转动,以控制臂身32的空间位置。臂身32由多节臂体组成,能够转动、摆动,以便于移动至相应位置。安装座33固定在臂身32远离转台31的一端,固定支撑工装34和活动支撑工装35均固定在安装座33上,以对保险杠进行支撑定位。
44.参照图4和图5,固定支撑工装34包括安装板341、连接板342和若干固定支撑柱343,连接板342为矩形板状结构,连接板342通过螺栓固定在安装座33上。安装板341一体固定在连接板342的侧壁上,固定支撑柱343固定在安装板341背离连接板342的侧壁上,本实施例中固定支撑柱343设有一个,固定支撑柱343垂直与安装板341的侧壁,固定支撑柱343可以与保险杠侧壁抵接,以对保险杠起到支撑作用。
45.参照图4和图5,活动支撑工装35包括装配板351、动力件352和若干活动支撑柱353,本实施例中动力件352为气缸,气缸的缸体螺栓固定在安装座33上,装配板351的侧壁与气缸伸缩杆的端部固定连接,且气缸伸缩杆的伸缩路径与固定支撑柱343的长度方向一致。本实施例的活动支撑柱353设有两个,两个活动支撑柱353固定在装配板351背离动力件
352一侧的两端,且活动支撑柱353垂直于装配板351的侧壁,在使用时,动力件352驱动装配板351移动,同时带动活动支撑柱353做伸缩运动,且活动支撑柱353与固定支撑柱343形成品字形支撑结构,进而对保险杠进行支撑固定。另外,活动支撑柱353和固定支撑柱343的端部均固定套设由橡胶套37,以对保险杠起到保护作用。
46.参照图5,为了进一步提高支撑固定效果,装配板351和安装板341上均螺栓固定有若干工业吸盘36,其中,安装板341上固定有两个,装配板351上固定有一个,三个工业吸盘36呈品字形设置,通过工业吸盘36对保险杠进行吸附,协同固定支撑柱343和活动支撑柱353对保险杠进行更好的支撑固定。
47.参照图4和图6,支撑定位机器人3上还安装有标记识别模块4和供电模块,标记识别模块4包括图像采集单元41和图像处理单元42,图像采集单元41包括摄像头411,摄像头411固定在安装座33上,以对保险杠上的定位标记进行图像采集,然后经过图像处理单元42分析处理,并输出相应的信号,进而控制转台31以及动力件352启闭,调控臂身32、固定支撑工装34以及活动支撑工装35的位置,以使活动支撑柱353和固定支撑柱343对保险杠的指定位置进行支撑固定。
48.供电模块包括电源vcc1和电源vcc2,电源vcc1的电压设置为0.5v-3.5v,电源vcc2的电压设置为6v-24v,电源vcc1用于给标记识别模块4供电,电源vcc2作为摄像头411的供电电路。
49.参照图6,图像处理单元42包括视频解码器421、处理子单元422、存储子单元423以及驱动电路424,视频解码器421与摄像头411通信连接,摄像头411选用ccd摄像头,摄像头411输出的模拟信号由视频解码器421进行解码,视频解码器421将视频信号转换为多帧图像信号,多帧图像信号存储在存储子单元423内,处理子单元422调取存储子单元423内的数据进行标记图像识别,视频解码器421的型号为adv7181b。
50.参照图6,处理子单元422包括主处理器4221以及协处理器4222,主处理器4221选用dsp,dsp的型号为adsp-bf561,dsp内设置有图像识别算法,dsp进行标记图像识别工作。并且,可以根据不同类型的定位标记(如颜色、激光码等)设定相应的图像识别算法,应用更加广泛。协处理器4222选用fpga,fpga的型号为ep2c5dsp,fpga作为dsp的协处理器4222,以协助dsp提高图像识别的效率。dsp和fpga内部均设置有缓冲区,用于临时存储输入的信号。转换后的图像数据先储存在缓冲区,dsp按帧采集图像数据,并进行标记图像识别工作,若识别出标记图像,输出驱动信号至驱动电路424,此时驱动电路424导通,转台31带动臂身32移动至相应位置,同时带动固定支撑柱343移动至相应位置,然后动力件352驱动活动支撑柱353移动至相应位置,以对保险杠进行支撑固定。
51.参照图6,存储子单元423包括sdram存储器4231和ram存储器4232,sdram存储器4231作为dsp的外扩存储器,ram存储器4232作为fpga的外扩存储器,以提高存储的数据量。
52.驱动电路424的型号为tpl250,驱动电路424的信号输入端与dsp的信号输出端电性连接,驱动电路424用于对dsp的输出进行功率放大。
53.本技术实施例一种保险杠治具的实施原理为:在使用时,通过夹具2将保险杠的左翼板02和右翼板03夹持固定,然后支撑定位机器人3上的标记识别模块4对保险杠上的定位标记进行识别分析,然后控制转台31和臂身32移动,并带动固定支撑柱343和活动支撑柱353对保险杠的相应位置进行支撑固定,在工业吸盘36的协助下保持保险杠位置不变,便于
后续的加工,提高加工精度。
54.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1