一种机械臂的制作方法
1.本公开涉及机械臂技术领域,尤其涉及一种机械臂。
背景技术:
2.随着机器人技术的迅速发展,机器人在生产、日常生活等方面凸显出越来越明显的重要性和优越性。轻量化柔顺机械臂不同于传统的工业机械臂,其特点是体积小、重量轻、低功耗和较高的负载/自重比,其易于安装和维护,不仅在空间探测、事故救援、家庭服务等领域有着重要的应用价值和广阔的发展前景,并且在工业生产、医疗等领域也有着很大的市场潜力。然而,现有轻型机械臂普遍存在结构复杂、质量大、体积大、灵活性差等缺陷,严重阻碍了多样化作业的需求。
3.因此,本技术提出一种机械臂。
技术实现要素:
4.为了解决上述技术问题中的至少一个,本公开提供了一种机械臂。
5.本实用新型采用的技术方案是这样的:
6.一种机械臂,包括底座组件、肩部组件、大臂组件、小臂组件、腕部组件和夹爪组件;
7.所述底座组件内安装有第一轴驱动机构,所述肩部组件安装于所述底座组件上,所述第一轴驱动机构用于控制所述肩部组件转动;
8.所述肩部组件内安装有第二轴驱动机构、第三轴驱动机构,所述大臂组件一端与所述肩部组件连接,所述第二轴驱动机构用于控制所述大臂组件转动,所述大臂组件另端与所述小臂组件连接,所述第三轴驱动机构用于控制所述小臂组件转动;
9.所述小臂组件包括同轴设置的第一小臂和第二小臂,所述第一小臂与所述第二小臂之间通过第四轴驱动机构连接,所述第四轴驱动机构用于控制所述第二小臂转动;
10.所述腕部组件与所述第二小臂连接,所述夹爪组件与所述腕部组件连接,所述腕部组件包括第五轴驱动机构、第六轴驱动机构,所述第五轴驱动机构用于驱动所述第六轴驱动机构、夹爪组件转动,所述第六轴驱动机构用于驱动所述夹爪组件转动。
11.优选地,所述夹爪组件具有第七轴驱动机构,所述第七轴驱动机构用于控制所述夹爪组件抓取和释放。
12.优选地,所述第一轴驱动机构、第二轴驱动机构、第三轴驱动机构、第四轴驱动机构、第五轴驱动机构、第六轴驱动机构、第七轴驱动机构均为驱动电机;
13.所述大臂组件另端转动安装有同步轮,所述第三轴驱动机构的输出轴连接有同步带,所述同步带与所述同步轮连接,所述第一小臂与所述同步轮固定连接并同步转动。
14.优选地,所述同步轮与所述第一小臂之间通过连接件连接,所述连接件的一端与所述同步轮同步转动连接,所述连接件的另端与所述第一小臂的端部固定连接。
15.优选地,所述同步轮的连接有驱动轴,所述驱动轴随所述同步轮转动,所述连接件
的一端与所述驱动轴固定连接。
16.优选地,所述底座组件还包括底座法兰、底座轴承座、底座轴承挡板、底座轴承套;
17.所述第一轴驱动机构与所述底座法兰通过螺钉连接;
18.所述底座轴承座和所述底座法兰通过螺钉连接;
19.所述底座轴承挡板与所述底座轴承座通过螺钉连接;
20.所述底座轴承套与所述第一轴驱动机构通过螺钉连接;
21.所述底座法兰通过螺钉与工作台面相连。
22.优选地,所述肩部组件还包括u型法兰,所述u型法兰固定在所述第一轴驱动机构的输出轴上,且所述第二轴驱动机构、第三轴驱动机构固定在所述u型法兰的两侧。
23.优选地,所述第二轴驱动机构的输出轴轴线与所述第三轴驱动机构的输出轴轴线重合,所述第二轴驱动机构的输出轴与所述大臂组件、第三轴驱动机构驱动连接。
24.优选地,所述腕部组件还包括转接法兰、连接法兰,所述第五轴驱动机构固定在转接法兰上,所述转接法兰与所述第二小臂固定连接;
25.所述第六轴驱动机构固定在所述连接法兰上,所述连接法兰与所述第五轴驱动机构的输出轴连接;
26.所述第五轴驱动机构能够控制所述连接法兰和所述第六轴驱动机构转动。
27.优选地,所述夹爪组件还包括配合法兰,所述第七轴驱动机构与所述配合法兰连接,所述配合法兰与所述连接法兰连接固定。
28.综上所述,本技术的机械臂将第二轴驱动机构、第三轴驱动机构放在肩部组件同轴处,将第四轴驱动机构放在第一小臂和第二小臂同轴处,整体结构简单,降低了整体质量和体积,整个结构灵活性好,使得该机械臂在具有7个自由度同时显著降低了装置的重量,并且还提高了产品性能和安全性。
附图说明
29.附图示出了本公开的示例性实施方式,并与其说明一起用于解释本公开的原理,其中包括了这些附图以提供对本公开的进一步理解,并且附图包括在本说明书中并构成本说明书的一部分。
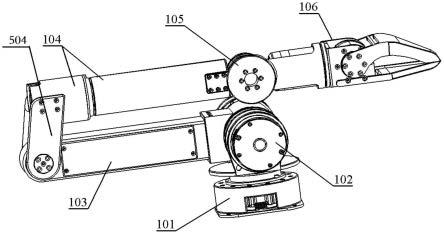
30.图1是本技术结构示意图;
31.图2是本技术底座组件结构示意图;
32.图3是本技术肩部组件结构示意图;
33.图4是本技术肩部组件局部剖视图;
34.图5是本技术大臂组件结构示意图;
35.图6是本技术小臂组件结构示意图;
36.图7是本技术腕部组件结构示意图;
37.图8是本技术夹爪组件结构示意图。
38.图中标记:101为底座组件,102为肩部组件,103为大臂组件,104为小臂组件,105为腕部组件,106为夹爪组件;
39.201为第一轴驱动机构,202为底座法兰,203为底座轴承座,204为底座轴承挡板,205为底座轴承套;
40.301为第二轴驱动机构,302为第三轴驱动机构,303为u型法兰,304为输出轴,305为转接三通,306为第一法兰,307为第二法兰,308为轴承盖;
41.401为同步轮,402为同步带,403为驱动轴,404为大臂盖板;
42.501为第一小臂,502为第二小臂,503为第四轴驱动机构,504为连接件;
43.601为第五轴驱动机构,602为第六轴驱动机构,603为转接法兰,604为连接法兰;
44.701为第七轴驱动机构,702为配合法兰。
具体实施方式
45.下面结合附图和实施方式对本公开作进一步的详细说明。可以理解的是,此处所描述的具体实施方式仅用于解释相关内容,而非对本公开的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本公开相关的部分。
46.需要说明的是,在不冲突的情况下,本公开中的实施方式及实施方式中的特征可以相互组合。下面将参考附图并结合实施方式来详细说明本公开。
47.如图1至8所示,一种机械臂,包括底座组件101、肩部组件102、大臂组件103、小臂组件104、腕部组件105和夹爪组件106;
48.底座组件101内安装有第一轴驱动机构201,肩部组件102安装于底座组件101上,第一轴驱动机构201用于控制肩部组件102转动;底座组件101还包括底座法兰202、底座轴承座203、底座轴承挡板204、底座轴承套205;第一轴驱动机构201与底座法兰202通过螺钉连接;底座轴承座203和底座法兰202通过螺钉连接;底座轴承挡板204与底座轴承座203通过螺钉连接;底座轴承套205与第一轴驱动机构201通过螺钉连接;底座法兰202通过螺钉与工作台面相连;
49.肩部组件102内安装有第二轴驱动机构301、第三轴驱动机构302,大臂组件103一端与肩部组件102连接,第二轴驱动机构301用于控制大臂组件103转动,大臂组件103另端与小臂组件104连接,第三轴驱动机构302用于控制小臂组件104转动;大臂组件103还包括大臂盖板404,大臂盖板404和大臂组件103通过螺钉连接;
50.小臂组件104包括同轴设置的第一小臂501和第二小臂502,第一小臂501与第二小臂502之间通过第四轴驱动机构503连接,第四轴驱动机构503用于控制第二小臂502转动;
51.腕部组件105与第二小臂502连接,夹爪组件106与腕部组件105连接,腕部组件105包括第五轴驱动机构601、第六轴驱动机构602,第五轴驱动机构601用于驱动第六轴驱动机构602、夹爪组件106转动,第六轴驱动机构602用于驱动夹爪组件106转动;腕部组件105还包括转接法兰603、连接法兰604,第五轴驱动机构601固定在转接法兰603上,转接法兰603与第二小臂502固定连接;第六轴驱动机构602固定在连接法兰604上,连接法兰604与第五轴驱动机构601的输出轴连接;第五轴驱动机构601能够控制连接法兰604和第六轴驱动机构602转动。
52.进一步地,夹爪组件106具有第七轴驱动机构701,第七轴驱动机构701和夹爪组件106通过螺钉相连,第七轴驱动机构701用于控制夹爪组件106抓取和释放;夹爪组件106还包括配合法兰702,第七轴驱动机构701与配合法兰702连接,配合法兰702与连接法兰604连接固定。
53.进一步地,第一轴驱动机构201、第二轴驱动机构301、第三轴驱动机构302、第四轴
驱动机构503、第五轴驱动机构601、第六轴驱动机构602、第七轴驱动机构701均为驱动电机;
54.大臂组件103另端转动安装有同步轮401,第三轴驱动机构302的输出轴304连接有同步带402,同步带402与同步轮401连接,第一小臂501与同步轮401固定连接并同步转动。
55.进一步地,同步轮401与第一小臂501之间通过连接件504连接,连接件504的一端与同步轮401同步转动连接,连接件504的另端与第一小臂501的端部固定连接,连接件504为小臂组件104和大臂组件103之间的连接提供了稳定可靠的连接基础,同步轮401通过连接件504带动小臂组件104转动。
56.进一步地,同步轮401的连接有驱动轴403,驱动轴403随同步轮401转动,连接件504的一端与驱动轴403固定连接,驱动轴403为连接件504的一端提供了可靠且合理的连接基础,同步轮401驱动驱动轴403转动,驱动轴403带动连接件504转动,连接件504带动小臂组件104转动。
57.进一步地,肩部组件102还包括u型法兰303、转接三通305、第一法兰306、第二法兰307、轴承盖308,u型法兰303固定在第一轴驱动机构201的输出轴上,且第二轴驱动机构301、第三轴驱动机构302固定在u型法兰303的两侧。第二轴驱动机构301和第一法兰306通过螺钉连接,第一法兰306和转接三通305通过螺钉连接,第三轴驱动机构302和第二法兰307通过螺钉连接,轴承盖308和u型法兰303通过螺钉连接,第二法兰307和u型法兰303通过轴承连接,第二法兰307和转接三通305通过螺钉连接。
58.进一步地,第二轴驱动机构301的输出轴轴线与第三轴驱动机构302的输出轴304轴线重合,第二轴驱动机构301的输出轴与大臂组件103、第三轴驱动机构302驱动连接。
59.本技术的机械臂具有6+1自由度,机械臂质量在6kg以内,将第二轴驱动机构301、第三轴驱动机构302放在肩部组件102同轴处,将第四轴驱动机构503放在小臂组件104同轴处,同时通过同步带402传动到同步轮401处,同步带402控制同步轮401转动,通过同步带402和同步轮401连接大臂组件103和小臂组件104,并控制小臂组件104转动,既降低了大臂组件103旋转部分的整体重量和转动惯量,也降低了对第二轴驱动机构301的力矩的要求和电机的重量,结构紧凑,保证了各电机的传动精度,也延长了臂展;
60.同时,制作新型轻量化柔顺夹爪,将第七轴驱动机构701固定在夹爪组件106中,夹爪组件106中的夹爪机构:结构件材料为树脂,3d打印而成,夹取范围在0-120
°
,质量在400g含电机230g以下,控制方式简单;通过第一轴驱动机构201、第二轴驱动机构301、第三轴驱动机构302、第四轴驱动机构503、第五轴驱动机构601、第六轴驱动机构602、第七轴驱动机构701配合使用,实现机械臂在7个自由度动作,保证关节电机的传动精度,结构紧凑,延长臂展,极大的降低产品质量的同时,提高产品性能和安全性。
61.本技术机械臂的动作过程如下:
62.第一轴驱动机构201驱动第二轴驱动机构301和第三轴驱动机构302整体转动,具体为绕第一轴驱动机构201的轴线转动,第二轴驱动机构301驱动第三轴驱动机构302和大臂组件103同步转动,具体为绕第二轴驱动机构301的轴线转动,第三轴驱动机构302的输出轴304通过同步带402驱动同步轮401转动,同步轮401从而带动整个小臂组件104转动,此处具体为整个小臂组件104绕同步轮401轴线转动,小臂组件104的第一小臂501与第二小臂502之间通过第四轴驱动机构503连接,第四轴驱动机构503驱动第二小臂502、腕部组件105
和夹爪组件106相对于第一小臂501转动,具体为绕第四轴驱动机构503的轴线转动,第五轴驱动机构601驱动第六轴驱动机构602和夹爪组件106转动,具体为绕第五轴驱动机构601的轴线转动,第六轴驱动机构602驱动夹爪组件106转动,具体为绕第六轴驱动机构602的轴线转动,第七轴驱动机构701驱动夹爪组件106中的夹爪转动,以便实现抓取和释放动作。
63.在本说明书的描述中,参考术语“一个实施例/方式”、“一些实施例/方式”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例/方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例/方式或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例/方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例/方式或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例/方式或示例以及不同实施例/方式或示例的特征进行结合和组合。
64.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
65.本领域的技术人员应当理解,上述实施方式仅仅是为了清楚地说明本公开,而并非是对本公开的范围进行限定。对于所属领域的技术人员而言,在上述公开的基础上还可以做出其它变化或变型,并且这些变化或变型仍处于本公开的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1