机器人系统的制作方法
1.本发明涉及一种机器人系统。
背景技术:
2.以往,已知有使用具有能够把持工件的臂的机器人来进行作业的机器人系统(例如,参照专利文献1)。在机器人的臂上设置有用于识别工件的摄像机。机器人系统通过预先存储工件的三维形状,从而基于由臂的摄像机识别出的三维形状来识别工件,通过臂来把持工件。
3.在通过与机床协作来对工件进行加工的机器人系统中,机器人通过臂来把持工件,从而进行下面的作业:将加工前的工件载置到机床的工作台上,并且将加工后的工件从工作台上送出。进行作业时的机器人的臂的移动预先由作业者进行示教。在机器人的作业区域内,存在有可能干扰到机器人的各种障碍物,因此作业者必须示教臂的移动以不使机器人与障碍物之间发生干扰。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2007-319938号公报
技术实现要素:
7.发明要解决的问题
8.为了不使机器人与障碍物之间发生干扰,还已知由固定设置在与机器人不同的场所的三维传感器预先测定障碍物并生成障碍物的三维点群。在该情况下,机器人基于三维点群来掌握在作业范围内有无障碍物,由此进行动作以不与障碍物之间发生干扰。
9.但是,被固定设置的三维传感器会产生测定不到而导致数据遗漏的区域。例如,关于隐藏在障碍物的阴影中的区域,固定设置的三维传感器不能识别到,从而产生数据的遗漏。因此,在障碍物的阴影中存在其它的障碍物的情况下,在作业时,机器人的臂有可能与障碍物之间发生干扰。为了避免数据的遗漏,也考虑设置多个三维传感器,或改变三维传感器的位置并重新测量。但是,在这些情况下,每一次设置三维传感器都需要进行校准,并不实用。因此,期望一种能够针对测定对象物简单地生成没有数据遗漏的三维点群的机器人系统。
10.用于解决问题的方案
11.本公开的一个方式所涉及的机器人系统具备:机器人,其具有臂;三维传感器,其设置于所述臂;以及三维点群生成部,其基于由所述三维传感器对测定对象物进行测定所得到的三维数据,来生成所述测定对象物的三维点群,其中,所述三维点群生成部将在所述机器人的作业区域内的任意的坐标系中一边通过所述臂的移动来改变所述三维传感器的位置一边对所述测定对象物进行测定所得到的三维数据进行合成,来生成所述测定对象物的所述三维点群。
12.发明的效果
13.根据一个方式,能够提供一种能够针对测定对象物简单地生成没有遗漏的三维点群的机器人系统。
附图说明
14.图1是示出机器人系统的立体图。
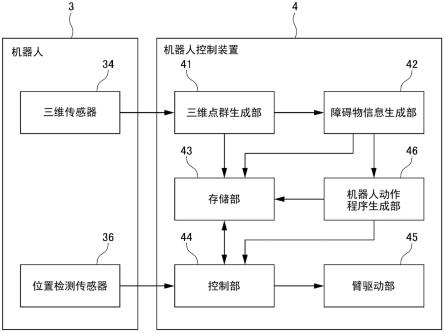
15.图2是示出第一实施方式所涉及的机器人系统的结构的框图。
16.图3是说明第一实施方式所涉及的机器人系统中的用于生成机器人动作程序的处理的流程图。
17.图4是说明第一实施方式所涉及的机器人系统中的生成三维点群时的处理的流程图。
18.图5是说明第一实施方式所涉及的机器人系统中的用于生成三维点群的动作的图。
19.图6是示出第二实施方式所涉及的机器人系统的结构的框图。
20.图7是说明第二实施方式所涉及的机器人系统中的用于生成三维点群的动作的图。
21.图8是说明对测定对象物进行测定时的三维传感器的测量范围的说明图。
具体实施方式
22.下面,参照附图来对本公开的实施方式进行说明。
23.(机器人系统的概要)
24.图1所示的机器人系统1设置在对工件进行加工的加工室100的附近。机器人系统1具有设置在基台2上的机器人3和控制机器人3的动作的机器人控制装置4。在基台2上配置有作为机器人3的作业对象的多个工件w。在加工室100的内部设置有对工件w进行规定的加工的机床200。
25.机器人3是在被固定于基台2上的主体部31的上部具有通过多个关节能够在任意的方向上进行移动的臂32的多关节机器人。在臂32的前端设置有对工件w进行把持的把持部33、能够拍摄外界的三维传感器34、以及通过作业者的把持来以手动操作的方式使臂32移动的手持引导件(hand guide)35。
26.机器人3具有用于检测机器人3的位置和姿势的位置检测传感器36(参照图2)。位置检测传感器36由设置于与臂32的各关节部的驱动轴对应的驱动马达(未图示)的例如角度传感器构成。能够由位置检测传感器36获取臂32的各驱动马达的旋转角度。由此来检测机器人3的臂32的把持部33的位置和姿势。
27.机器人3通过使臂32穿过开闭门101打开了的加工室100的开口部102后按照基于机器人动作程序的动作路径进行移动,来进行将把持部33所把持的加工前的工件w载置到加工室100内的机床200的工作台201上的动作。另外,机器人3进行由把持部33把持加工完的工件w并从机床200的工作台201上送出的动作。此时,要求机器人3的臂32以不与加工室100的包括开闭门101的外壁面103、加工室100内的装置及部件等障碍物之间发生干扰的方式进行移动。
28.三维传感器34例如由视觉传感器构成。三维传感器34将存在于机器人3的作业区域内的加工室100的外壁面103、加工室100的内部以及工件w作为测定对象物进行拍摄,来获取测定对象物的三维数据。详细地说,三维传感器34测定到测定对象物的距离分布等的三维数据,并将测定出的三维数据输出到机器人控制装置4。三维传感器34与把持部33并排地安装在臂32的前端,通过进行校准来预先规定相对于臂32的相对位置。因此,通过位置检测传感器36,检测臂32的把持部33的位置和姿势并且还检测三维传感器34的位置和姿势。
29.(机器人系统的第一实施方式)
30.图2示出第一实施方式所涉及的机器人系统1的结构。机器人控制装置4具有三维点群生成部41、障碍物信息生成部42、存储部43、控制部44、臂驱动部45以及机器人动作程序生成部46。
31.三维点群生成部41根据由三维传感器34测定得到的三维数据来生成并输出三维点群。三维点群是指存在于三维空间中的一个以上的物体(测定对象物)的表面上分布的多个点的集合。三维点群生成部41通过将由三维传感器34测定得到的多个三维数据进行合成,来生成测定对象物的三维点群,并将所生成的三维点群输出到障碍物信息生成部42。另外,在测定对象物是工件w的情况下,三维点群生成部41将测定出的工件w的三维点群输出到存储部43。
32.障碍物信息生成部42基于由三维点群生成部41生成的作为障碍物的测定对象物的三维点群,来生成障碍物信息。障碍物信息是表示在机器人3的作业区域内有可能干扰到移动的臂32的障碍物的位置的信息。机器人3的作业范围(臂32的移动范围)是预先确定的,因此能够确定三维点群中有可能干扰到臂32的障碍物的位置。由障碍物信息生成部42生成的障碍物信息被发送到存储部43并进行保存、登记。
33.控制部44基于由位置检测传感器36检测出的臂32的位置信息来控制臂驱动部45。控制部44通过控制臂驱动部45,来进行臂32的移动以及把持部33对工件w的把持动作。
34.机器人动作程序生成部46生成用于由机器人3对工件w进行作业的机器人3的动作程序。机器人动作程序包含作业时的机器人3的动作路径的信息。基于由上述障碍物信息生成部42生成的障碍物信息来制作机器人3的动作路径。由机器人动作程序生成部46生成的机器人动作程序被发送到存储部43并进行保存、登记。
35.接着,基于图3所示的流程图来说明该机器人系统1中生成用于对工件w进行作业的机器人动作程序的处理。生成机器人动作程序的处理按照预先存储在机器人控制装置4中的规定的处理程序来执行。
36.首先,机器人动作程序生成部46获取并登记机器人3的初始位置(s1)。机器人3的初始位置由位置检测传感器36来获取。接着,机器人动作程序生成部46经由控制部44控制臂驱动部45来使臂32移动,由三维传感器34对工件w进行测量。由此,获取并登记工件w的位置(s2)。之后,机器人动作程序生成部46进行机器人动作程序的初始制作(s3)。
37.初始制作的机器人动作程序是包含由臂32把持工件w并将该工件w载置到例如工作台201上为止的机器人3的动作路径的暂定的动作程序。有可能干扰到臂32的障碍物的信息未必反映在该动作程序中。因此,机器人动作程序生成部46使机器人系统1的模式转变为障碍物信息生成模式,获取并登记障碍物信息(s4)。
38.进一步基于图4所示的流程图来说明该步骤s4中的用于获取障碍物信息的具体的
处理。
39.首先,一边通过使臂32移动来改变三维传感器34相对于作为障碍物的测定对象物的位置一边进行测定对象物的测定,获取三维数据(s41)。测定对象物是在机器人3的作业范围内有可能干扰到臂32的物体。具体地说,测定对象物是加工室100的外壁面103、配置在加工室100的内部的装置及部件。
40.在本实施方式中,由三维传感器34对测定对象物进行测定时的臂32的移动如图5所示那样由作业者op手动地进行。即,作业者op用手把持臂32的前端的手持引导件35,一边确认在臂32的移动路径上有无障碍物,一边在机器人3的作业范围内的任意的坐标系中手动地直接使臂32移动。
41.即使在机器人3的作业范围内存在从机器人3处看不到的隐藏的障碍物(例如,隐藏在开闭门101和外壁面103的背面的装置及部件),也能够通过如图5所示那样由作业者op手动地使臂32移动到隐藏的障碍物的附近来可靠地进行测定。
42.像这样,一边通过作业者op的手动操作使臂32相对于测定对象物移动,一边由三维传感器34在机器人3的作业范围内的任意的坐标系中对测定对象物进行测定并获取多个三维数据。三维传感器34将获取到的多个三维数据输出到机器人控制装置4的三维点群生成部41。
43.三维点群生成部41将由三维传感器34获取到的多个三维数据进行合成来生成测定对象物的三维点群(s42)。由三维点群生成部41生成的三维点群的数据被输出到障碍物信息生成部42。
44.障碍物信息生成部42基于从三维点群生成部41发送的三维点群,来生成与有可能干扰到臂32的障碍物的位置信息相关的障碍物信息(s43)。由障碍物信息生成部42生成的障碍物信息被保存到存储部43(s44)。由此,障碍物信息生成模式结束。
45.在通过以上步骤而获取到障碍物信息之后,机器人动作程序生成部46再次返回到图3所示的流程。机器人动作程序生成部46根据在障碍物信息生成模式下获取到的障碍物信息来变更初始制作的机器人动作程序(s5)。由此,机器人动作程序生成部46基于障碍物信息来反映有可能干扰到臂32的所有的障碍物信息,生成包含机器人3的避免与障碍物之间的干扰的动作路径的机器人动作程序。所生成的机器人动作程序被发送到存储部43并进行保存。
46.之后,机器人系统1基于包含有可能干扰到臂32的障碍物信息的机器人动作程序,使机器人3自动运转,进行对工件w的把持和搬送的作业(s6)。由于使自动运转的机器人3进行动作的机器人动作程序包含障碍物信息,因此机器人3动作时的臂32与障碍物之间的干扰被减少或消除,该障碍物信息由包含从机器人3的设置场所处看不到的隐藏的障碍物的信息的没有遗漏的三维点群构成。
47.根据第一实施方式所涉及的机器人系统1,能够得到下面的效果。即,三维点群生成部41将在机器人3的作业区域内的任意的坐标系中一边通过臂32的移动来改变三维传感器34的位置一边对测定对象物进行测定所得到的三维数据进行合成,来生成测定对象物的三维点群。因此,能够针对测定对象物简单地生成并获取没有数据遗漏的三维点群。
48.三维点群生成部41将一边通过作业者op手动地使臂32移动来改变三维传感器34的位置一边进行测定所得到的测定对象物的三维数据进行合成,从而生成测定对象物的三
维点群。因此,能够从各种视点对测定对象物进行测定,能够由三维传感器34容易且无遗漏地测定存在于机器人3的作业范围内的障碍物。
49.通过这样获取的障碍物信息即使因工件w的种类变更而机器人3的动作路径发生变更也不会改变。因此,不需要每当工件w的种类变更时都由三维传感器34重新生成新的障碍物信息、或者重新示教臂32的移动路径。
50.设置于臂32的三维传感器34兼用作在作业时为了识别工件w而使用的三维传感器。因此,不需要设置不同的三维传感器以用于障碍物信息的生成和用于工件w的识别,能够构建廉价的机器人系统1。
51.三维点群生成部41将一边通过作业者op直接把持臂32的手持引导件35而手动地使臂32移动来改变三维传感器34的位置一边进行测定所得到的测定对象物的三维数据进行合成,从而生成测定对象物的三维点群。由此,能够轻松地生成没有遗漏的三维点群。但是,三维点群生成部41也可以将一边通过使用示教器(teach pendant)的作业者进行的点动进给动作使臂32移动来改变三维传感器34的位置一边进行测定所得到的测定对象物的三维数据进行合成,从而生成测定对象物的三维点群。
52.(机器人系统的第二实施方式)
53.在第一实施方式所涉及的机器人系统1中,作业者op一边确认障碍物的有无一边手动地进行由三维传感器34对测定对象物进行测定时的臂32的移动。但是,机器人3的作业范围内的障碍物与机器人3的位置关系有时已大致确定。在该情况下,也可以是基于规定的动作程序而由机器人系统1自动地进行臂32的移动。
54.图6示出第二实施方式所涉及的机器人系统1a的结构。在机器人控制装置4a中,针对图2所示的机器人控制装置4追加了障碍物信息生成用动作程序存储部47。
55.障碍物信息生成用动作程序存储部47预先保存有用于自动地进行使用三维传感器34对测定对象物进行测定时的臂32的移动的障碍物信息生成用动作程序。障碍物信息生成用动作程序包含针对机器人3的动作命令,用于使臂32在假定为预先知道的估计障碍物与臂32不会发生干扰的范围内移动。因而,机器人控制装置4a的机器人动作程序生成部46在障碍物信息生成模式下使用三维传感器34对测定对象物进行测定时,如图7所示那样基于障碍物信息生成用动作程序来控制臂驱动部45以自动地使臂32移动。
56.在具备该机器人控制装置4a的机器人系统1中,使用三维传感器34对测定对象物进行测定时的具体的动作依据图4所示的流程图来执行。即,在图4的步骤s41中,机器人动作程序生成部46从障碍物信息生成用动作程序存储部47读出障碍物信息生成用动作程序,来代替作业者op手动地使臂32移动。机器人动作程序生成部46基于读出的障碍物信息生成用动作程序,经由控制部44控制臂驱动部45,来自动地使臂32移动,从而进行三维传感器34对测定对象物的测定。由此来获取由三维传感器34对存在于机器人3的作业范围内的障碍物进行测定所得到的三维数据。之后,执行与图4所示的步骤s42至步骤s44同样的处理。
57.在该机器人系统1a中,也与第一实施方式所涉及的机器人系统1同样地,能够针对测定对象物简单地生成没有数据遗漏的三维点群。由于不需要作业者op手动地使臂32移动,因此能够得到能够更迅速且简单地获取障碍物信息的效果。
58.期望基于三维传感器34的测量范围生成障碍物信息生成用动作程序。即,如图8所示,障碍物信息生成用动作程序以使臂32移动前的三维传感器34的测量范围x1与臂32移动
后的三维传感器34的测量范围x2接近的方式、或者以使测量范围x1与测量范围x2或部分重叠的方式来使机器人3动作。图8示出将加工室100的外壁面103作为测定对象物并由三维传感器34进行测定的情况。由此,即使在为了对测定对象物进行测定而自动地使臂32移动的情况下,也能够由三维传感器34针对测定对象物进行无遗漏的测定。
59.也可以由存储部43兼具障碍物信息生成用动作程序存储部47的功能。障碍物信息生成用动作程序也可以在由三维传感器34进行测定对象物的测定时,从例如外部的服务器等存储装置被读入到机器人控制装置4a。机器人控制装置4a也可以构成为:具有切换开关(未图示),该切换开关针对由三维传感器34进行测定对象物的测定时的臂32的移动切换是由作业者op手动地进行、还是基于障碍物信息生成用动作程序自动地进行,且能够由作业者op选择任一种。
60.在上面的各实施方式中,三维点群生成部41、障碍物信息生成部42以及机器人动作程序生成部46构成机器人控制装置4、4a的功能的一部分,但不限定于此。三维点群生成部41、障碍物信息生成部42以及机器人动作程序生成部46中的至少一个也可以与机器人控制装置4、4a分开设置。臂驱动部45也可以与机器人控制装置4、4a分开设置。障碍物信息生成用动作程序存储部47也可以与机器人控制装置4a分开设置。
61.附图标记说明
62.1、1a:机器人系统;3:机器人;32:臂;34:三维传感器;41:三维点群生成部;43:障碍物信息生成部;46:机器人动作程序生成部;w:工件。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1