用于医药容器的机械的操作装置和操作系统的制作方法
本发明涉及一种用于医药包装器具的机械的操作装置,所述医药包装器具例如是诸如注射器、小瓶或药筒的医药容器,包括:可在至少一个接合装置处相对于彼此移动的两个或更多个部段;用于使两个或更多个部段相对于彼此移动的至少一个驱动装置;和用于操作包装器具的操作工具,其中部段包括起始部段和末端部段,该起始部段安固或可安固在用于操作装置的保持装置处,操作工具被保持在该末端部段处或者操作工具由末端部段包括。此外,本发明涉及一种用于医药包装器具的操作系统,所述医药包装器具例如是诸如注射器、小瓶或药筒的医药容器,包括至少一个上述类型的操作装置和保持装置,操作装置被保持在该保持装置处。
背景技术:
1、操作装置和操作系统尤其应用在用于加工医药包装器具的设备中。医药包装器具尤其包括医药容器,例如注射器、小瓶或药筒。容器也可以被称为“器皿”。小瓶也可以被称为“长颈瓶”或“梨状瓶”。在此尤其地,用于单个容器或多个容器的载具也可以被视为包装器具。例如已知被称为巢的用于接纳矩阵状布置的容器的载具。例如,所谓的托盘可以被视为其他类型的包装器具,在该托盘中容器以并排平放定位的方式布置。在该设备中,医药容器通常填充有液态或固态药物并且随后被封闭。药物尤其是医学有效的物质(药剂)。例如,可以通过操作装置转移包装器具。例如,容器从共同的载具(巢或托盘)被转交至运输系统。替选地或补充地,可以经由操作装置为容器填充物料。例如,可以经由操作装置转移包装器具、例如巢或托盘。
2、在当前的示例中可以直接或间接进行“操作”。这尤其可以理解为,包装器具可以与操作工具接触或者不与操作工具接触。
技术实现思路
1、本发明的目的是提供一种操作装置和一种操作系统,其具有提高的运行可靠性。
2、根据本发明,该目的在开头提到的类型的操作装置中通过如下方式得以实现,即操作装置包括至少一个管路,该管路穿过两个或更多个部段中的至少两个部段和至少一个接合装置被引导至操作工具。
3、在根据本发明的操作装置中,至少一个管路至少局部地穿过两个或更多个部段和至少一个接合装置被引导至操作工具。通过至少一个管路可以影响利用操作工具意图操作包装器具的效果。例如,可以针对待完成的任务来操纵操作工具。至少一个管路的贯通部例如可以在与医药相适应的环境中并且尤其是在操作装置的气氛中被证明是有利的。在操作医药包装器具时,操作装置例如至少部分地布置在保护气氛中。“保护气氛”在此尤其可以包括用于净化目的的气氛。保护气氛尤其可以包括h2o2的气流,其在外侧施加至操作装置。通过将至少一个管路至少部分地定位在部段之内,保护该管路免受保护气氛的影响,由此例如可以避免管路的损坏。此外,该部段之内的至少一个管路被保护免于与操作系统或设备的其他组件碰撞和/或防止用户的无意的介入。总之,通过根据本发明的操作装置的设计方案可以提高运行可靠性。
4、可以规定,操作工具构成末端部段。
5、有利的是,至少一个管路从起始部段至末端部段被引导穿过两个或更多个部段。尤其地,至少一个管路可以穿过整个操作装置被引导至工具。
6、操作装置的特征尤其在于实施为与医药相适应,尤其是在两个彼此接合连接的部段之间的至少一个接合装置的区域中与医药相适应地密封。
7、“与医药相适应”在此尤其可以是操作装置的实施方案,其满足对保护气氛的耐受性、可能的有毒的待加工物料的耐受性、可清洁性、在净化腔中的应用和/或至少一种不同类型的特性的要求,该特性能实现医药包装器具的符合规定的且符合许可的加工。在此,操作装置优选地至少在操作系统的可被施加保护气氛的区域中实施为与医药相适应的。该区域在下文中也被称为“第二分区”。
8、例如可以通过以下方式实现与医药相适应的实施方案,即操作装置的组件至少在可被施加保护气氛的一侧优选地由不锈钢制成。例如采用成分为1.4435、1.4404或1.4301的不锈钢。
9、操作装置在当前的情况下尤其通过设有至少一个驱动装置而被视为“机械的”,两个部段通过该驱动装置彼此接合连接。
10、在本发明的优选实施方式中,至少一个接合装置是枢转装置,其中部段通过驱动装置可相对于彼此围绕枢转轴线枢转。在当前的情况下,枢转轴线例如取向成横向于并且尤其是垂直于由保持装置限定的平面、例如支撑元件的平面。例如,枢转轴线是竖直取向的。
11、“枢转”在当前的情况下尤其也可以指“转动”。
12、操作装置在优选的实施方式中有利地包括多于两个部段,其中两个部段分别通过相应的驱动装置以可在接合装置处移动的方式彼此连接。
13、可以规定,两个或更多个接合装置被设计为枢转装置,其中枢转装置的两个或更多个相对应的枢转轴线以相对于彼此平行的方式取向。替选地或补充地,两个枢转轴线例如可以以相对于彼此横向并且尤其是垂直的方式取向。
14、在本发明的优选实施方式中,操作装置例如包括三个部段,其中起始部段可相对于中间部段枢转,该中间部段本身可相对于末端部段枢转。
15、尤其是本发明的最后提到的有利实施方式中,操作装置例如是scara机器人或者包括或构成scara机器人。接合臂机器人、特别是水平式接合臂机器人在此尤其被视为scara机器人。
16、在本发明的优选实施方式中,操作工具是拾取工具,其包括用于拾取医药包装器具的至少一个拾取元件。例如,可以借助操作装置将包装器具从第一位置转移至第二位置(拾取和放置)。例如可以考虑转移容器、巢或托盘。替选地例如可以将容器从其他包装器具、尤其是托盘或巢中取出,或者放到其他包装器具中。拾取机构优选地可以包括多个拾取元件,以便能够彼此共同和/或同时地操作多个包装器具。
17、在本发明的优选实施方式中,操作工具是填充工具,该填充工具包括用于将物料填入医药容器中的至少一个装填元件。该至少一个装填元件例如是可引入容器的开口中的针状件,其中物料穿过针状件被装填到容器中。优选地,填充机构包括多个装填元件,以便能够同时填充多个容器。
18、应理解的是,拾取元件和/或装填元件有利地被设计为相同的。
19、至少一个管路有利地可以包括、是或构成以下管路中的至少一个管路:
20、-用于供电和/或控制操作工具的驱动装置的电气管路。例如,通过管路为驱动装置提供控制信号和/或为驱动装置施加电能。
21、-供应管路,可穿过该供应管路供应物料以填入容器中。例如,该物料被供应至上述装填元件,其中供应管路例如连接到装填元件。
22、-用于为包装器具施加负压的流体管路。例如,流体管路布置在拾取元件处,使得可以借助由流体管路提供的负压将包装器具保持在拾取元件处。反之,可以结束对流体管路施加负压和/或对流体管路吹气,以使包装器具从拾取元件处松开。
23、在流体管路的不同类型的实施方案中,例如可以至少部分地对容器的内部空间抽真空。
24、-用于将流体从操作工具排出的流体管路。以此方式例如可以从操作工具排出气体,特别是涉及无菌的、与医药相适应的气氛。
25、在当前的情况下,“流体”尤其可以是气体或液体。这在此也可以理解为气体混合物或液体混合物。
26、在应用拾取工具时,至少一个流体管路尤其可以是气动管路,其为了保持包装器具可在拾取元件处施加负压。在应用装填工具时,至少一个供应管路尤其可以被构造用于供应液态物料。
27、在应用拾取工具时尤其规定了,拾取工具具有与包装器具的轮廓相适配的轮廓。例如,拾取工具具有下述凹部,容器可以至少部分地被引入该凹部中,以便抵靠到拾取工具的区段处。在这种情况下,容器例如通过负压尤其以气动的方式被保持在拾取元件处。例如,拾取元件贴靠在容器的外壳处。
28、为了操作巢或托盘例如可以规定,操作工具具有抽吸体,该抽吸体具有下述边缘,其可以抵靠到巢或托盘处的边缘。可以规定,拾取工具点状地贴靠在包装器具处或者线形地或面状地贴靠在包装器具处。
29、至少一个管路可以具有不同的性征。在作为流体管路或供应管路的设计方案中,至少一个管路例如是软管管路。软管管路例如可以由塑料材料、例如硅树脂材料制成。在作为电气管路的设计方案中,至少一个管路尤其是或包括电缆。
30、至少一个管路至少在延伸穿过部段的区段处优选地被设计为可变形的。
31、两个或更多个管路例如可以至少局部共同在包封部中延伸。
32、可以规定,至少一个管路延伸穿过操作装置的两个或更多个部段,其例如在操作工具中分岔成多个单个的管路。例如可以考虑用于施加负压的流体管路,其在操作工具中分岔成多个区段,其中每个区段布置在拾取元件处。
33、在设置装填工具的装填元件时有利的可以是,用于供应物料的供应管路单独地被引导穿过操作装置。
34、可以规定,至少一个管路在末端部段处完全在操作工具之内延伸。
35、替选地可以规定,至少一个管路从末端部段伸出并且局部地在操作工具之外延伸。
36、有益的是,至少一个部段是空心轴或者包括空心轴,至少一个管路被引导穿过该空心轴。例如起始部段是或包括空心轴,该空心轴在优选的实施方式中可以以可移动的方式安固在保持装置处。例如空心轴可以相对于保持装置转动和/或线性地平动。空心轴可以限定或包括转动轴线,与此相关的部段可以围绕该转动轴线转动。
37、有利的可以是,至少一个部段包括或构成具有接纳腔的壳体,至少一个管路朝向末端部段的方向被引导穿过该接纳腔,并且在该接纳腔中布置有至少一个驱动装置,两个或更多个部段通过该驱动装置可相对于彼此移动。该至少一个其他的管路例如是用于供电和/或控制驱动装置的电气管路。
38、在最后提到的有利的实施方式中,操作装置优选地包括至少一个其他的管路,其与至少一个驱动装置作用连接。其他的管路优选地穿过起始部段以及必要时穿过至少一个其他的部段被引导至驱动装置。同样可以在其他的管路中实现已经结合至少一个管路至操作工具的贯通部所阐释的优点。
39、操作装置有利地可以包括驱动装置,至少一个部段可通过该驱动装置平移运动。优选地,起始部段在此可平移运动,其中驱动装置布置在保持装置处。
40、驱动装置例如被设置用于提升和降低起始部段。在优选的实施方式中,驱动装置例如包括主轴驱动器。
41、如已经提到的那样,本发明还涉及一种用于医药包装器具、例如医药容器的操作系统。
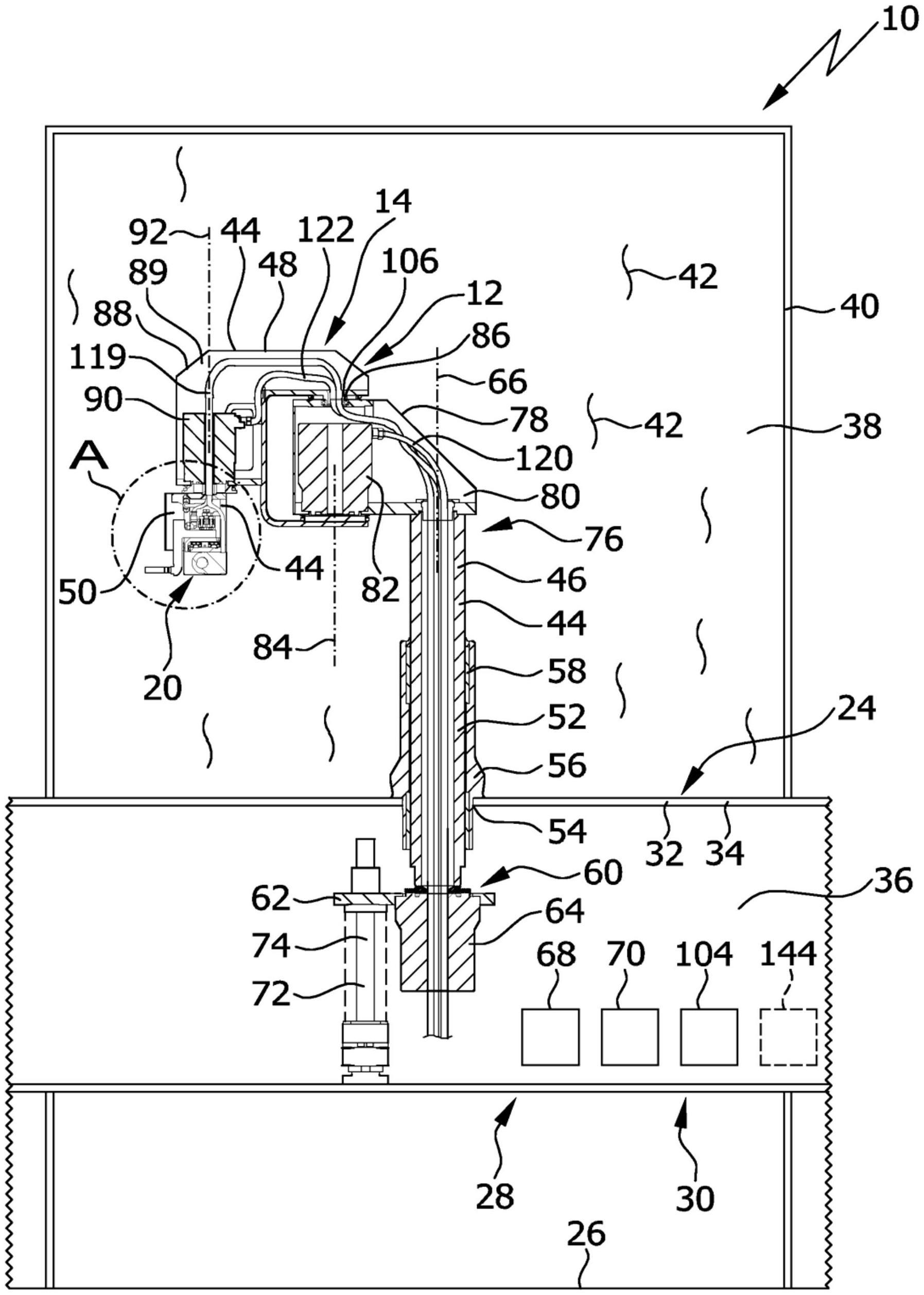
42、根据本发明的、实现开头提到的目的的操纵系统包括保持装置和至少一个上述类型的操作装置,操作装置被保持在保持装置处,其中保持装置包括或形成分隔元件并且限定第一分区和第二分区,该第一分区和第二分区借助分隔元件彼此分隔开,其中操作工具布置在第二分区中,并且至少一个管路穿过分隔元件中的至少一个贯穿开口从第一分区被引导到第二分区中。
43、同样可以在操作系统中实现结合对根据本发明的操作装置的阐述所提到的优点。分隔元件将第一分区与第二分区分隔开,其中第二分区尤其被施加有保护气氛。操作装置优选地至少在第二分区中被设计为与医药相适应的。至少一个管路穿过贯穿开口被引导到第一分区中。这些分区优选地以与医药相适应的方式彼此分离。
44、优选地,起始部段接合穿过至少一个贯穿开口并且分别局部地布置在第一分区和第二分区中。起始部段借助保持元件优选地以可移动的方式安固在分隔元件处。保持元件例如是或者包括在分隔元件处的引导部,以引导起始部段相对于分隔元件的转动移动和/或平移运动。至少一个轴承元件优选地可以在保持元件和起始部段之间起作用。起始部段优选地以位置固定的方式固定在第一分区中。
45、保持元件可以是操作装置的组成部分或保持装置的组成部分。
46、被证明有利的是,保持装置形成用于操作装置的基座,其中分隔元件是或构成支撑元件。搭建元件例如至少部分地是板形的并且例如可以是桌板或类似物。基座例如可以由机架形成,操作装置安固在该机架处。
47、例如,第一分区布置在分隔元件之下,而第二分区布置在分隔元件之上。
48、例如“之下”和“之上”的位置和定向描述在此与操作系统的按规定的使用有关。保持装置尤其定位在实验室或车间的地板上。
49、在第一分区中例如布置有用于使操作装置相对于保持装置转动和/或平移运动的至少一个驱动装置。
50、在第一分区中例如布置有用于穿过至少一个管路在操作工具处提供过压和/或负压的至少一个压力产生装置和/或阀装置。
51、在第一分区中例如布置有用于物料的至少一个计量分配装置,物料可穿过至少一个管路被装填到容器中。
52、在第一分区中例如布置有用于提供供电和/或控制操作装置的至少一个驱动装置的至少一个电气装置。
53、操作系统优选地包括覆盖装置,其遮盖和/或侧向地覆盖在第二分区处的操作装置并且在第二分区中提供保护气氛。覆盖装置例如可以是所谓的隔绝体,利用该隔绝体尤其可以针对与医药相适应的环境在第二分区中提供保护气体、尤其是h2o2的气流。
54、在优选的实施方式中,操作系统是拾取系统,其中操作工具是拾取工具。
55、在优选的实施方式中,操作系统可以是填充系统,其中操作工具是填充工具。
- 还没有人留言评论。精彩留言会获得点赞!