工业机器人安全性处理方法及系统与流程
本公开主要涉及处理工业机器人的安全性。特别地,提供了在工作空间内处理工业机器人安全性的方法,以及在工作空间内处理工业机器人安全性的系统。
背景技术:
1、机器人系统可以包括在工作空间内操作的一个或若干个工业机器人。在一些机器人系统中,工作空间被物理围栏包围,以保护人免受一个或多个工业机器人的影响。
2、作为物理围栏的替代,一些机器人系统包括监视系统。监视系统可以使用各种监查功能来监查工作空间内的工业机器人,以确保高安全水平。在工业机器人违反了监视系统中设定的安全配置的情况下,监视系统可以自动停止工业机器人以避免事故。监视系统还可以报告违规。这种违规的一个示例是工业机器人以比监视系统中限定的最大速度更快的速度移动。
3、当外部监视系统已经介入以停止工业机器人时,使工业机器人上升并再次运行的过程可能很麻烦。例如,可能必须重启工业机器人。从而负面地影响工作空间内的过程质量和循环时间。因此,期望避免触发这种干预。
4、se1500299a1公开了一种工业机器人安全系统和用于避免两个机械手的移动部分之间或机械手的移动部分与靠近机械手的对象之间的碰撞的方法。机器人系统包括机械手和机器人控制器,机器人控制器用于用于控制机械手的移动部分的移动和动作。机器人控制器包括防碰撞系统和轨迹规划系统。机器人系统还包括与机器人控制器的防碰撞系统并行工作的安全控制器。上述方法包括交换各机械手的移动部分的规划轨迹信息的不同步骤,以防止移动部分之间或移动部分与对象之间的碰撞。
技术实现思路
1、在现有技术的解决方案中,机器人控制器不知道安全配置。因此,需要依赖于机器人程序员创建不违反安全配置的机器人程序。这会花费大量时间并且还难以验证。在安全配置改变的情况下,机器人程序员需要手动地更新机器人程序以符合新的安全配置。
2、本公开的一个目的在于提供一种在工作空间内有效处理工业机器人安全性的方法。
3、本公开的另一目的在于提供一种在工作空间内处理工业机器人安全性的方法,该方法能够减少工作空间内的停机时间。
4、本公开的又一目的在于提供一种在工作空间内处理工业机器人安全性的方法,该方法使得工业机器人能够更有效地满足由监视系统提供的安全配置的改变。
5、本公开的又一目的在于提供一种在工作空间内处理工业机器人安全性的方法,该方法为机器人程序员提供了高度易用性。
6、本公开的又一目的在于提供一种在工作空间内处理工业机器人安全性的方法,该方法组合地解决了上述几个或全部目的。
7、本公开的又一目的在于提供一种在工作空间内处理工业机器人安全性的系统,该系统解决了上述一个、几个或全部目的。
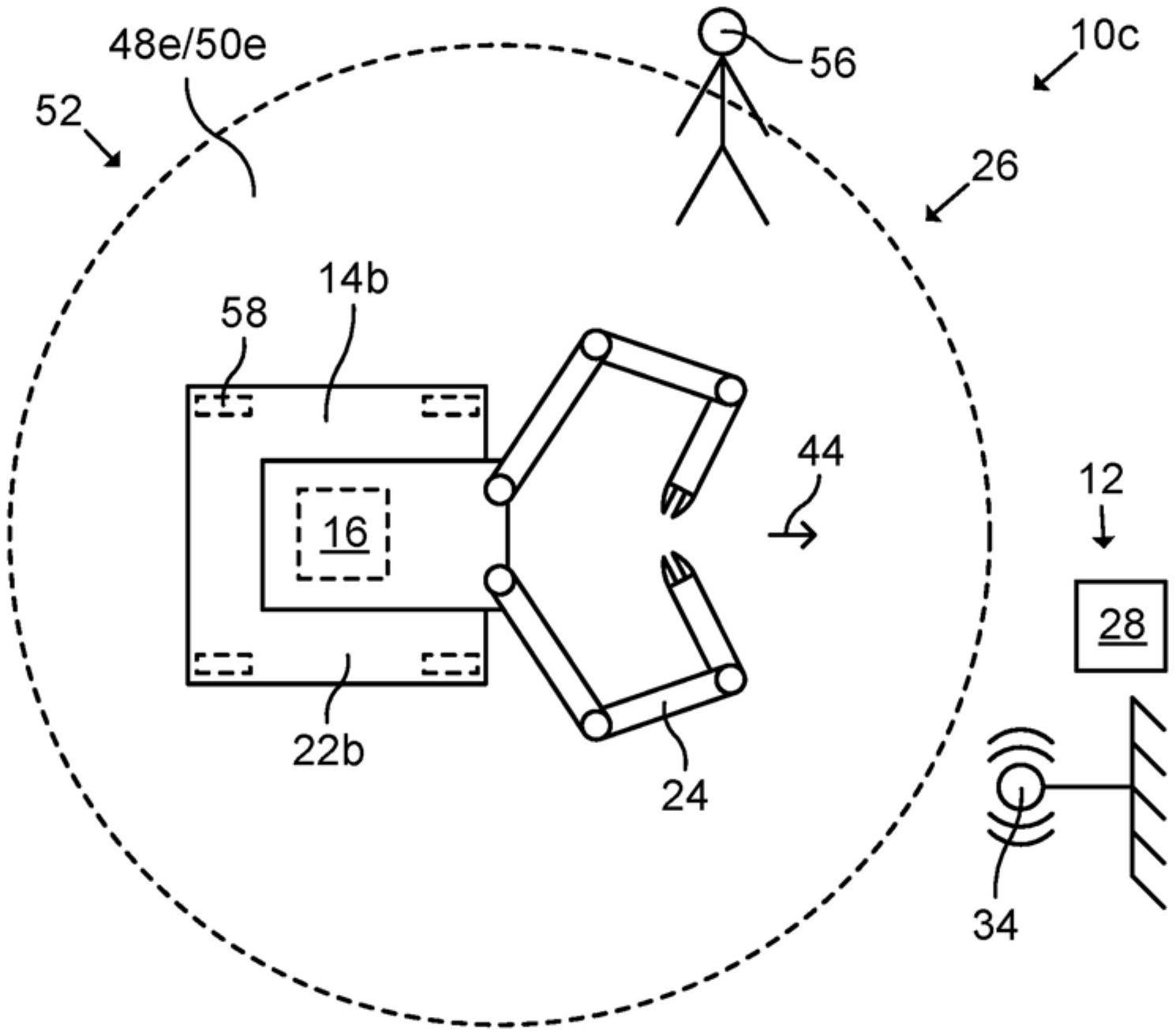
8、根据第一方面,提供了一种在工作空间内处理工业机器人安全性的方法,该方法包括通过监视系统提供几何区域,其中相对于工业机器人和/或工作空间限定几何区域,并且其中几何区域与工业机器人满足的至少一个条件相关联;将几何区域从监视系统传送至工业机器人的机器人控制系统;通过机器人控制系统,基于几何区域和至少一个条件来确定工业机器人的移动;通过工业机器人执行移动;以及通过监视系统监视相对于几何区域和至少一个条件的移动的执行。
9、监视系统提供对工作空间的安全监查。监视系统可以是经认证的安全控制系统,被配置为对工业机器人的移动(例如工业机器人的若干或所有可移动链路的移动)执行经认证的安全检查。监视系统可以提供监查功能,如果工业机器人违反安全配置,则该监查功能可以介入以停止工业机器人。
10、本方法是基于与工作空间内的一个或多个工业机器人共享由监视系统确定的安全配置的构思。安全配置包括一个或多个几何区域以及可选的其它信息。几何区域可以是静态几何区域。几何区域是机器人控制系统确定移动的基础。然而,将几何区域从监视系统传送至机器人控制系统不改变监视系统的关于安全配置监视工业机器人的移动执行的主要功能。
11、通过将几何区域从监视系统传送至机器人控制系统,工业机器人的路径编程变得更有效。例如,可以更容易地防止路径或轨迹违反与几何区域相关联的条件。这样,可以避免监视系统介入以停止工业机器人。因而可以避免或减少工业机器人的停机时间。此外,通过将几何区域从监视系统传送至机器人控制系统,进而使机器人控制系统处理几何区域和至少一个相关联的条件,可以改变几何区域和/或与几何区域相关联的条件,而不必手动地更新机器人控制系统中的机器人程序。
12、基于几何区域和至少一个条件来确定工业机器人的移动可以由机器人控制系统自动执行。机器人控制系统可以例如是机器人控制器。
13、在机器人控制系统中实现的规划器可以使用由监视系统传送的几何区域。规划器可以是路径规划器或轨迹规划器。这样,机器人控制系统能够避免因监视系统触发安全反应而导致的停止。此外,在设置和改变应用软件和机器人程序时,机器人程序员不必明确地详细考虑安全配置。因此,该方法使得安全配置能够与编程和集成分离。
14、如果减小限速几何区域的尺寸,则该方法能够快速且简单地修改机器人程序,以利用没有约束的区域。这样能够有效地提高工业机器人的生产率。
15、该方法还使得能够改变要由机器人控制系统有效处理的工作空间内已经实施的安全配置,诸如引入附加条件几何区域。由于机器人控制系统总是基于监视系统所传送的最新更新的几何区域和相关联的条件来确定工业机器人的移动,所以工业机器人能够主动适应更新的安全配置,从而降低工业机器人违反安全配置的风险。同时,在给定安全配置约束的情况下,工业机器人的性能可以最大化。这样提高了工业机器人的生产率。
16、几何区域可以“不安全地”从监视系统传送至机器人控制系统。也就是说,安全配置从监视系统到机器人控制系统的传送不必是安全级的。
17、该方法可以包括提供多个几何区域,其中每个几何区域与要由工业机器人满足的至少一个条件相关联。每个几何区域可以例如是工作空间内的二维或三维区。每个几何区域可以提供工作空间内的虚拟屏障。
18、条件可以是各种类型的条件。当条件被触发时,可以对工业机器人施加约束。根据一个示例,工业机器人在几何区域内是速度受限的。根据另一示例,当除工业机器人之外的对象出现在几何区域中时,工业机器人是速度受限的,无论工业机器人是否在几何区域内。根据又一示例,仅当工业机器人在几何区域内且对象出现在几何区域内时,工业机器人才是速度限制的。在该变型中,工业机器人可以在几何区域之外全速操作或以更快的速度操作。根据又一示例,条件禁止工业机器人进入几何区域。因此,几何区域可以是禁区。
19、工业机器人可以包括能够沿三个或更多个轴线(例如六个或七个轴线)编程的机械手。工业机器人可以是移动机器人、可以被固定至地面、或者可以沿轨道移动。
20、工业机器人的移动可以是工业机器人的一个或多个部分的移动。该部分可以是机械手的工具或tcp(工具中心点)或工业机器人(例如移动机器人)的基座。
21、当工业机器人的一部分位于几何区域内时,可以触发或激活与几何区域相关联的至少一个条件。该部分可以例如是机械手的工具或tcp。
22、该方法还可以包括通过监视系统提供至少一个条件;以及将至少一个条件从监视系统传送至机器人控制系统。因此,从监视系统传送至机器人控制系统的安全配置还可以包括与每个几何区域相关联的至少一个条件。每对几何区域和与该几何区域相关联的至少一个条件是安全约束。多个此类安全约束可以由监视系统提供并传送至机器人控制系统。
23、作为可能的替代方案,每个几何区域的至少一个条件可以预先定义,因而可以无需从监视系统传送至机器人控制系统。这种预先定义条件的示例是防止工业机器人进入几何区域,以及在触发该至少一个条件时完全停用工业区域。
24、至少一个条件可以由事件触发或激活。事件可以是各种类型的事件。至少一个条件可以由几何区域内存在工业机器人或者对象来激活。因此,每个条件均可以具有主动或被动的状态。该方法还可以包括通过机器人控制系统,基于至少一个条件的状态来确定工业机器人的移动。
25、至少一个条件可以包括对工业机器人的操作参数的限制。操作参数的示例包括速度、加速度、力、扭矩、温度和有效载荷。
26、该方法还可以包括在工业机器人不满足至少一个条件的情况下,通过监视系统采取对策。尽管几何区域由监视系统传送至机器人控制系统,但监视系统仍将相对于安全配置监视移动的执行,并且在工业机器人违反安全配置的情况下采取对策。对策的示例包括停止工业机器人、限制工业机器人的操作参数以及发出警报。
27、该方法还可以包括在执行移动之前,执行所确定的相对于几何区域和至少一个条件的移动的离线仿真。通过离线仿真,可以分析机器人程序以查看机器人程序如何受到安全配置的影响。如果必须降低速度或者如果工业机器人必须在几何区域中停止以便满足与几何区域相关联的至少一个条件,则工业机器人的生产率可能受到负面影响。因此,机器人程序员可以利用模拟,在安全配置方面改进机器人程序。此外,通过使用安全配置作为所确定的移动的离线仿真的基础,可以避免耗费时间模拟将违反安全配置的移动。
28、确定移动可以包括确定工业机器人的路径。为此,机器人控制系统可以包括自动路径规划器,自动路径规划器可以基于几何区域和至少一个条件自动地确定移动的路径。路径和轨迹的不同之处在于,路径是移动的几何形状,而轨迹包含沿路径的特定行为。例如,第一轨迹可以是沿路径以第一速度的移动,并且不同于第一轨迹,第二轨迹可以是沿相同路径以不同于第一速度的第二速度的移动。因此,在该变型中,移动的确定不限于固定的移动几何形状。
29、根据第二方面,提供了一种在工作空间内处理工业机器人安全性的系统,该系统包括:机器人控制系统,机器人控制系统被配置为控制工业机器人;以及监视控制系统。监视控制系统被配置为提供几何区域,其中相对于工业机器人和/或工作空间限定几何区域,并且其中几何区域与工业机器人满足的至少一个条件相关联;并且将几何区域传送至机器人控制系统。机器人控制系统被配置为基于几何区域和至少一个条件来确定工业机器人的移动;并且命令工业机器人执行移动。监视控制系统还被配置为控制监视相对于几何区域和至少一个条件的移动的执行。
30、监视控制系统可以被配置为提供至少一个条件;以及将至少一个条件传送至机器人控制系统。
31、当工业机器人或对象进入几何区域时,该至少一个条件可以变为有效。
32、至少一个条件可以包括对工业机器人的操作参数的限制。
33、监视控制系统可以被配置为在工业机器人不满足至少一个条件的情况下命令采取对策。
34、确定移动可以包括确定工业机器人的路径。
35、该系统还可以包括工业机器人。
36、该系统还可以包括监视系统,监视系统包括监视控制系统和用于监视工作空间的监视设备。
- 还没有人留言评论。精彩留言会获得点赞!