一种张拉整体结构及机器人的制作方法
1.本发明涉及机器人技术领域,特别是涉及一种张拉整体结构及机器人。
背景技术:
2.现有很多管道系统空间狭小,环境恶劣,难以甚至无法进行人工检查和维修。现有用于管道检查、维修的管道内爬行机器人大多基于传统的刚体传动机构设计,相对来说柔顺性与适应性较差,在垂直上升、克服急转弯或其他不规则情况时,对驱动系统功率的要求也更高。张拉整体结构是一种在建筑与结构工程领域应用较为广泛的结构,是由一组不连续的刚性受压构件与一组连续的柔性受拉构件组成的自支承、自应力的空间网格结构,独特的结构形式使得张拉整体结构同时保留了刚性构件的承载能力与柔性构件的变形能力,兼具刚体结构与软体结构的优点,并在近年来逐渐获得了机器人领域研究人员的青睐。
技术实现要素:
3.本发明的目的是提供一种张拉整体结构及机器人,以解决上述现有技术存在的问题,柔顺性和适应性好,张拉整体结构能够实现轴向拉伸/径向收缩与轴向收缩/径向拉伸;机器人能够实现在管道内爬行运动。
4.为实现上述目的,本发明提供了如下方案:
5.本发明提供了一种张拉整体结构,包括驱动结构、第一弹性元件、第二弹性元件、第三弹性元件、第四弹性元件、第五弹性元件、第六弹性元件、第七弹性元件、第八弹性元件、第九弹性元件、第十弹性元件、第十一弹性元件、第十二弹性元件、第十三弹性元件、第十四弹性元件、第十五弹性元件、第一连接压杆、第二连接压杆、第三连接压杆、第四连接压杆和第五连接压杆;
6.所述第一弹性元件的一端、所述第二弹性元件的一端、所述第三弹性元件的一端、所述第四弹性元件的一端和所述第五弹性元件的一端分别与所述驱动结构的一端连接;
7.所述第六弹性元件的一端、所述第七弹性元件的一端、所述第八弹性元件的一端、所述第九弹性元件的一端和所述第十弹性元件的一端分别与所述驱动结构的另一端连接;
8.所述第一连接压杆的一端与所述第一弹性元件的另一端连接,所述第一连接压杆的另一端与所述第七弹性元件的另一端连接;所述第二连接压杆的一端与所述第二弹性元件的另一端连接,所述第二连接压杆的另一端与所述第八弹性元件的另一端连接;所述第三连接压杆的一端与所述第三弹性元件的另一端连接,所述第三连接压杆的另一端与所述第九弹性元件的另一端连接;所述第四连接压杆的一端与所述第四弹性元件的另一端连接,所述第四连接压杆的另一端与所述第十弹性元件的另一端连接;所述第五连接压杆的一端与所述第五弹性元件的另一端连接,所述第五连接压杆的另一端与所述第六弹性元件的另一端连接;
9.所述第一连接压杆的另一端与所述第二连接压杆的一端通过所述第十一弹性元件连接,所述第二连接压杆的另一端与所述第三连接压杆的一端通过所述第十二弹性元件
连接,所述第三连接压杆的另一端与所述第四连接压杆的一端通过所述第十三弹性元件连接,所述第四连接压杆的另一端与所述第五连接压杆的一端通过所述第十四弹性元件连接,所述第五连接压杆的另一端与所述第一连接压杆的一端通过所述第十五弹性元件连接。
10.优选地,所述第一弹性元件、所述第二弹性元件、所述第三弹性元件、所述第四弹性元件和所述第五弹性元件沿所述驱动结构的周向均匀设置;所述第六弹性元件、所述第七弹性元件、所述第八弹性元件、所述第九弹性元件和所述第十弹性元件结构沿所述驱动结构的周向均匀设置。
11.优选地,所述第一弹性元件、所述第六弹性元件、所述第二弹性元件、所述第七弹性元件、所述第三弹性元件、所述第八弹性元件、所述第四弹性元件、所述第九弹性元件、所述第五弹性元件和所述第十弹性元件结构沿所述驱动结构的周向依次设置。
12.优选地,所述第一弹性元件、所述第二弹性元件、所述第三弹性元件、所述第四弹性元件、所述第五弹性元件、所述第六弹性元件、所述第七弹性元件、所述第八弹性元件、所述第九弹性元件和所述第十弹性元件结构相同。
13.优选地,所述第十一弹性元件、所述第十二弹性元件、所述第十三弹性元件、所述第十四弹性元件和所述第十五弹性元件结构相同。
14.优选地,所述第一连接压杆、所述第二连接压杆、所述第三连接压杆、所述第四连接压杆和所述第五连接压杆的结构相同。
15.优选地,所述驱动结构为电动推杆、气缸或液压缸。
16.优选地,所述第一连接压杆、所述第二连接压杆、所述第三连接压杆、所述第四连接压杆和所述第五连接压杆均采用塑料制成。
17.优选地,所述第一弹性元件、所述第二弹性元件、所述第三弹性元件、所述第四弹性元件、所述第五弹性元件、所述第六弹性元件、所述第七弹性元件、所述第八弹性元件、所述第九弹性元件、所述第十弹性元件、所述第十一弹性元件、所述第十二弹性元件、所述第十三弹性元件、所述第十四弹性元件和所述第十五弹性元件均为弹簧或弹性绳索。
18.本发明还提供了一种机器人,包括至少三个所述张拉整体结构,相邻的所述张拉整体结构的所述驱动结构铰接。
19.本发明相对于现有技术取得了以下技术效果:
20.本发明的张拉整体结构能够实现整体外形尺寸的轴向拉伸/径向收缩与轴向收缩/径向拉伸;在此基础上将三个或以上张拉整体结构串联即得到一种适用于管道内爬行的机器人,通过合理地设置各个张拉整体结构的作动顺序,可以实现机器人在管道内的爬行运动。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
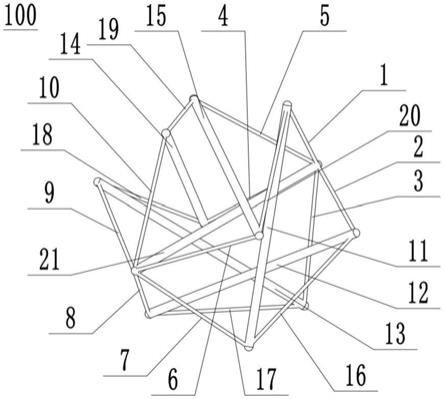
22.图1为本发明的张拉整体结构轴测图(收缩状态);
23.图2为本发明的张拉整体结构主视图(收缩状态);
24.图3为本发明的张拉整体结构侧视图(收缩状态);
25.图4为本发明的张拉整体结构轴测图(拉伸状态);
26.图5为本发明的张拉整体结构侧视图(拉伸状态);
27.图6为本发明的机器人侧视图(收缩状态);
28.图7为本发明的机器人运动过程示意图;
29.其中:100-张拉整体结构,200-机器人,1-第一弹性元件,2-第二弹性元件,3-第三弹性元件,4-第四弹性元件,5-第五弹性元件,6-第六弹性元件,7-第七弹性元件,8-第八弹性元件,9-第九弹性元件,10-第十弹性元件,11-第一连接压杆,12-第二连接压杆,13-第三连接压杆,14-第四连接压杆,15-第五连接压杆,16-第十一弹性元件,17-第十二弹性元件,18-第十三弹性元件,19-第十四弹性元件,20-第十五弹性元件,21-驱动结构。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.本发明的目的是提供一种张拉整体结构及机器人,以解决上述现有技术存在的问题,柔顺性和适应性好,张拉整体结构能够实现轴向拉伸/径向收缩与轴向收缩/径向拉伸;机器人能够实现在管道内爬行运动。
32.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
33.实施例一
34.如图1-图5所示:本实施例提供了一种张拉整体结构100,包括驱动结构21、第一弹性元件1、第二弹性元件2、第三弹性元件3、第四弹性元件4、第五弹性元件5、第六弹性元件6、第七弹性元件7、第八弹性元件8、第九弹性元件9、第十弹性元件10、第十一弹性元件16、第十二弹性元件17、第十三弹性元件18、第十四弹性元件19、第十五弹性元件20、第一连接压杆11、第二连接压杆12、第三连接压杆13、第四连接压杆14和第五连接压杆15;
35.第一弹性元件1的一端、第二弹性元件2的一端、第三弹性元件3的一端、第四弹性元件4的一端和第五弹性元件5的一端分别与驱动结构21的一端连接;
36.第六弹性元件6的一端、第七弹性元件7的一端、第八弹性元件8的一端、第九弹性元件9的一端和第十弹性元件10的一端分别与驱动结构21的另一端连接;
37.第一连接压杆11的一端与第一弹性元件1的另一端连接,第一连接压杆11的另一端与第七弹性元件7的另一端连接;第二连接压杆12的一端与第二弹性元件2的另一端连接,第二连接压杆12的另一端与第八弹性元件8的另一端连接;第三连接压杆13的一端与第三弹性元件3的另一端连接,第三连接压杆13的另一端与第九弹性元件9的另一端连接;第四连接压杆14的一端与第四弹性元件4的另一端连接,第四连接压杆14的另一端与第十弹性元件10的另一端连接;第五连接压杆15的一端与第五弹性元件5的另一端连接,第五连接压杆15的另一端与第六弹性元件6的另一端连接;
38.第一连接压杆11的另一端与第二连接压杆12的一端通过第十一弹性元件16连接,第二连接压杆12的另一端与第三连接压杆13的一端通过第十二弹性元件17连接,第三连接压杆13的另一端与第四连接压杆14的一端通过第十三弹性元件18连接,第四连接压杆14的另一端与第五连接压杆15的一端通过第十四弹性元件19连接,第五连接压杆15的另一端与第一连接压杆11的一端通过第十五弹性元件20连接。
39.本实施例中,第一弹性元件1、第二弹性元件2、第三弹性元件3、第四弹性元件4和第五弹性元件5沿驱动结构21的周向均匀设置;第六弹性元件6、第七弹性元件7、第八弹性元件8、第九弹性元件9和第十弹性元件10结构沿驱动结构21的周向均匀设置。
40.本实施例中,第一弹性元件1、第六弹性元件6、第二弹性元件2、第七弹性元件7、第三弹性元件3、第八弹性元件8、第四弹性元件4、第九弹性元件9、第五弹性元件5和第十弹性元件10结构沿驱动结构21的周向依次设置。
41.本实施例中,第一弹性元件1、第二弹性元件2、第三弹性元件3、第四弹性元件4、第五弹性元件5、第六弹性元件6、第七弹性元件7、第八弹性元件8、第九弹性元件9和第十弹性元件10结构相同,即第一弹性元件1、第二弹性元件2、第三弹性元件3、第四弹性元件4、第五弹性元件5、第六弹性元件6、第七弹性元件7、第八弹性元件8、第九弹性元件9和第十弹性元件10的长度和弹性系数相同。
42.本实施例中,第十一弹性元件16、第十二弹性元件17、第十三弹性元件18、第十四弹性元件19和第十五弹性元件20结构相同,即第十一弹性元件16、第十二弹性元件17、第十三弹性元件18、第十四弹性元件19和第十五弹性元件20的长度和弹性系数相同。
43.本实施例中,第一连接压杆11、第二连接压杆12、第三连接压杆13、第四连接压杆14和第五连接压杆15的结构相同,具体地,第一连接压杆11、第二连接压杆12、第三连接压杆13、第四连接压杆14和第五连接压杆15的尺寸相同。本实施例中,第一连接压杆11、第二连接压杆12、第三连接压杆13、第四连接压杆14和第五连接压杆15均采用塑料制成,具体地可以选择树脂、尼龙等,材质轻。
44.本实施例中,驱动结构21为电动推杆、气缸或液压缸等多种形式的驱动装置。
45.本实施例中,第一弹性元件1、第二弹性元件2、第三弹性元件3、第四弹性元件4、第五弹性元件5、第六弹性元件6、第七弹性元件7、第八弹性元件8、第九弹性元件9、第十弹性元件10、第十一弹性元件16、第十二弹性元件17、第十三弹性元件18、第十四弹性元件19和第十五弹性元件20均为拉伸弹簧或弹性绳索等轻质构件。
46.本实施例的张拉整体结构100质量较轻,结构相对简单,组成零部件数量少,通过一定数量的连接压杆(第一连接压杆11、第二连接压杆12、第三连接压杆13、第四连接压杆14和第五连接压杆15)和拉伸弹簧(第一弹性元件1、第二弹性元件2、第三弹性元件3、第四弹性元件4、第五弹性元件5、第六弹性元件6、第七弹性元件7、第八弹性元件8、第九弹性元件9、第十弹性元件10、第十一弹性元件16、第十二弹性元件17、第十三弹性元件18、第十四弹性元件19和第十五弹性元件20)直接连接,不需要传统的运动传动机构,可以减轻重量。
47.本实施例的张拉整体结构100能够实现整体外形尺寸的轴向拉伸/径向收缩与轴向收缩/径向拉伸,各拉伸弹簧承受拉力,各连接压杆承受压力,驱动结构21的长度可以调节。
48.本实施例的有益效果如下:1、张拉整体结构100由轻质的拉伸弹簧与连接压杆组
成,同时也保留了刚性受压构件的承载能力,使结构整体上强度质量比高;2、张拉整体结构100能够将外部载荷分布到整个网络结构,有助于提高机器人200的负载能力;3、张拉整体结构100占用空间小,内部空间可用于搭载传感器等仪器设备;4、通过调整各拉伸弹簧的预紧力可以调节结构的整体刚度;5、连接压杆之间通过拉伸弹簧连接,而没有直接刚性接触,柔顺性好。
49.实施例二
50.如图6所示:本实施例提供了一种机器人200,包括至少三个串联设置的实施例一的张拉整体结构100,相邻的张拉整体结构100的驱动结构21可通过球铰等结构实现铰接,每两个相邻张拉整体结构100之间允许3个转动自由度运动。
51.如图7所示:图中机器人200由三个张拉整体结构100串联组成,从右至左依次为第一张拉整体结构100、第二张拉整体结构100、第三张拉整体结构100,运动状态从上至下依次为状态一、状态二、状态三、状态四、状态五,整个运动过程完成机器人200整体的自左向右位移运动。状态一时,三个张拉整体结构100均处于收缩状态,机器人200与管道内壁保持紧密接触;状态二时,第三张拉整体结构100为收缩状态,与管道内壁保持紧密接触,第一张拉整体结构100和第二张拉整体结构100变为拉伸状态,此时,机器人200整体长度相对于状态一时变长;状态三时,第一张拉整体结构100变为收缩状态,与管道内壁保持紧密接触,第二张拉整体结构100和第三张拉整体结构100保持不变,分别为拉伸状态和收缩状态,此时机器人200整体长度相对于状态二时变短,但是仍比状态一长;状态四时,第二张拉整体结构100变为收缩状态,第三张拉整体结构100变为拉伸状态,第一张拉整体结构100保持不变,仍为收缩状态,此时机器人200整体长度与状态三时一样长;状态五时,第一张拉整体结构100和第二张拉整体结构100不变,仍为收缩状态,与管道内壁保持紧密接触,第三张拉整体结构100变为收缩状态,此时机器人200整体位置相对于状态一右移了一段距离,实现了向右运动。状态一、状态二、状态三、状态四、状态五循环进行,实现机器人200的连续前进运动。
52.由于机器人200相邻张拉整体结构100之间有3个转动自由度(绕空间三个正交轴的转动,即俯仰、滚转、偏航),相邻两个张拉整体结构100之间允许转动,机器人200除了在直线管道内爬行,还能够在一定范围内的弯管中实现转弯。
53.本实施例的机器人200的优点:可靠性和容错性好,由多个张拉整体结构100串联组成,其中一个张拉整体结构100损坏,依靠其它张拉整体结构100仍能够正常工作。
54.本实施例针对现有管道内爬行机器人200存在的问题,设计一种基于张拉整体结构100的管道内爬行机器人200,具有质量轻、柔顺性好、负载能力高等优点,在机器人200等领域具有广阔的应用前景。
55.本说明书中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1