一种小型多功能服务机器人
1.本发明涉及服务设备技术领域,具体涉及一种小型多功能服务机器人。
背景技术:
2.新冠病毒疫情发生以来,为了避免疫情传播,同时也为了提高自身防护能力,戴口罩、测体温、消毒以成为人们日常生活中必不可或缺的一部分;为了便于人们的日常活动,各种类型的服务设备也随之诞生。
3.目前市面上大部分设备功能单一,例如发放口罩、废弃口罩回收、测温、人手消毒功能中的一种,且仅有少部分固定的口罩发放设备,但不具备口罩回收功能。
4.服务设备只有放置在场所的必经处,才能保证服务效益,适用范围小。在面对大型集会或者广场活动的情况下,人们无法及时更换口罩,且旧口罩没有集中的地方存放,易造成口罩的二次污染,同时也容易引起病毒、细菌的传播。例如专利号为cn202010233494.3的发明专利,其公开了一种全自动医用口罩发放存储箱,虽然该专利的储存箱拥有发放口罩、人体消毒、测温的功能;但仍存在如下缺陷:
5.1、现有设备功能单一,在回收废弃口罩过程中,未能对废弃口罩进一步消毒杀菌,容易引起二次污染,同时也容易引发病毒与细菌的传播。
6.2、现有设备服务效益低,只有放在多数人经过的地方才能确保服务设备的服务效益,使用场地受到局限。
7.因此,本发明提出了一种小型多功能服务机器人,此服务机器人集成了口罩回收消毒、口罩发放、人手消毒等功能。
技术实现要素:
8.为了克服现有技术的不足,本发明提供了一种小型多功能服务机器人,解决了现有设备在回收废弃口罩过程中,容易引发二次污染,病毒与细菌的传播,适用范围收到场地限制等问题。
9.本发明解决其技术问题所采用的技术方案是:一种小型多功能服务机器人,包括壳体,所述壳体顶面设有投放口和消毒口,前侧设有口罩出口,后侧设有开关门;所述壳体内设有旧口罩回收消毒装置和口罩发放装置;
10.所述口罩发放装置包括竖直设置的竖直固定框和水平设置的水平固定框,所述竖直固定框穿过所述水平固定框且与之固连;
11.所述水平固定框左侧边框处固设有前后移动底座,前后移动底座上设有水平设置且能够转动的第一螺杆,所述前后移动底座上设有第一滑块,所述第一螺杆穿过所述第一滑块且与之螺纹连接,所述第一滑块能够在所述前后移动底座上滑动;
12.所述第一滑块上侧固设有左右移动底座,左右移动底座上设有水平设置且能够转动的第二螺杆,所述左右移动底座上设有第二滑块,所述第二螺杆穿过所述第二滑块且与之螺纹连接,所述第二滑块能够在所述左右移动底座上滑动,所述第一螺杆长度方向与所
述第二螺杆的长度方向垂直;
13.所述第二滑块后侧固设有上下移动底座,上下移动底座上设有竖直设置且能够转动的第三螺杆,所述上下移动底座上设有第三滑块,所述第三螺杆穿过所述第三滑块且与之螺纹连接,所述第三滑块能够在所述上下移动底座上滑动;所述第三滑块与一吸盘通过连杆固连,该吸盘开口向下,所述吸盘与微型负压泵连接;
14.所述第三滑块下侧设有若干口罩盒,所述口罩盒前侧设有弧形导向板,所述口罩出口下侧边高度与导向板靠近于口罩出口一端的高度相同。
15.优选的,所述吸盘上设有压力传感器。
16.优选的,所述第一滑块、第二滑块、第三滑块均为矩形,所述第一螺杆、第二螺杆、第三螺杆分别通过第一电机、第二电机、第三电机驱动转动。
17.优选的,所述口罩发放装置后侧且位于所述水平固定框上设有支撑台,所述微型负压泵位于该支撑台上,所述微型负压泵吸入口与所述吸盘连接。
18.优选的,所述竖直固定框右侧设有消毒瓶,所述支撑台上设有静音泵,所述静音泵与所述消毒口连通。
19.优选的,所述竖直固定框下端与一底板固连,所述竖直固定框上设有支撑板,该支撑板位于所述底板上侧,所述底板与所述支撑板之间还设有若干支撑杆;
20.所述底板上设有两个对称设置的主动轮,该主动轮通过设置在底板上侧的主动电机驱动;所述底板下侧设有两个对称设置的从动轮。
21.优选的,所述旧口罩回收消毒装置包括设置在支撑台上的回收箱,所述回收箱内设有紫外激光器,所述回收箱与所述开关门连通。
22.一种小型多功能服务机器人的控制系统,包括主控制模块、消毒模块、回收消毒模块、口罩发放模块和路径规划模块;
23.所述主控模块用于接收信息并传输指令给消毒模块、回收消毒模块、口罩发放模块和路径规划模块;
24.所述消毒模块包括红外传感器单元和真空泵单元,所述消毒模块用于接收主控制模块指令并控制真空泵单元启闭;
25.所述回收消毒模块用于接收主控制模块指令并传输给紫外线单元,所述紫外线单元用于对废旧口罩消毒;
26.所述口罩发放模块用于发放口罩,所述路径规划模块用于规划服务机器人的移动路线。
27.优选的,所述口罩发放模块包括气泵吸取单元、口罩检测单元、人体感应单元和移动单元;所述人体感应单元用于感应使用者距离,将传输信息至主控制模块。
28.优选的,所述路径规划模块包括gps定位单元、自动回充单元、超声波传感器单元和防碰撞单元。
29.本发明的有益效果为:
30.1、壳体上设置投放口、口罩出口、消毒口,实现了机器人的旧口罩回收、新口罩发放、人员消毒等功能一体化;尤其是紫外激光器的设置,能够对旧口罩进行消毒杀菌,避免口罩二次污染以及细菌病毒的传播。
31.2、口罩发放装置结构设置,通过水平设置的第一螺杆和第二螺杆以及竖直设置的
第三螺杆,实现了第一滑块前后移动,第二滑块左右移动,第三滑块的上下移动,进一步达到吸盘的全方位移动,便于吸取不同口罩盒内的口罩;相对的,机器人也能够装载更多口罩共他人使用。此外,通过吸盘吸取口罩,确保每次吸取一个口罩,避免口罩浪费。
32.3、吸盘与微型负压泵连接的管路上设有压力传感器,能够精确掌控吸取口罩时的压力情况,避免空吸或口罩掉落等情况出现。
附图说明
33.附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
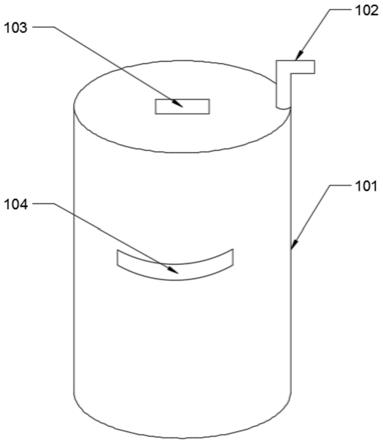
34.图1是本实施例中服务机器人的主视结构示意图;
35.图2是本实施例中服务机器人的内部主视结构示意图;
36.图3是本实施例中服务机器人另一角度的内部主视结构示意图;
37.图4是本实施例中服务机器人内部后视结构示意图;
38.图5是本实施例中服务机器人另一角度内部后视结构示意图;
39.图6是本实施例中服务机器人后视结构示意图;
40.图7是本实施例中旧口罩回收消毒装置的结构示意图;
41.图8是本实施例中服务机器人控制系统的连接结构示意图。
42.附图标记:
43.101:壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
102:消毒口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
103:投放口
44.104:口罩出口
ꢀꢀꢀꢀꢀꢀꢀ
105:开关门
45.201:竖直固定框
ꢀꢀꢀꢀꢀ
202:静音泵
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
203:消毒瓶
46.204:支撑板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
205:底板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
206:主动轮
47.207:主动电机
ꢀꢀꢀꢀꢀꢀꢀ
208:支撑杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
209:口罩盒
48.210:导向板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
211:水平固定框
ꢀꢀꢀꢀꢀꢀꢀ
212:第一螺杆
49.213:第一滑块
ꢀꢀꢀꢀꢀꢀꢀ
214:第二电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
215:第二螺杆
50.216:第二滑块
ꢀꢀꢀꢀꢀꢀꢀ
217:第三电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
218:前后移动底座
51.219:左右移动底座
52.301:从动轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302:上下移动底座
53.401:微型负压泵
ꢀꢀꢀꢀꢀ
402:吸盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
403:第三滑块
54.404:第三螺杆
ꢀꢀꢀꢀꢀꢀꢀ
501:支撑台
55.701:引导仓
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
702:出风口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
703:紫外激光器
56.704:反射镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
705:散热凸起
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
706:收纳仓
具体实施方式
57.下面结合附图对本发明的优选实施例进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
58.在本发明中,术语“安装”、“连接”、“固定”等术语均应广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
59.在本发明中,在未作相反说明的情况下,实用的方位词如“上、下、左、右”通常是指参考附图所示的上、下、左、右;“内、外”是指相对于各部件本身的轮廓的内、外。
60.实施例1
61.参见图1至图7所示,一种小型多功能服务机器人,包括壳体101和控制模块,所述控制模块用于控制服务机器人;
62.参见图1和6所示,所述壳体101顶面设有投放口103,用于收集废旧口罩;壳体101前侧设有口罩出口104,用于发放新口罩;壳体101后侧设有开关门105,取出所收集的废旧口罩;壳体101顶面还设有消毒口102,便于人们消毒;壳体 101上设置投放口103、口罩出口104、消毒口102,实现了机器人的旧口罩回收、新口罩发放、人员消毒等功能一体化,相比于现有服务机器人,本实施例中的机器人功能更加完善,多功能一体化。
63.参见图2-5所示,所述壳体101内设有旧口罩回收消毒装置和口罩发放装置;所述口罩发放装置包括竖直设置的竖直固定框201和水平设置的水平固定框 211,所述竖直固定框201穿过所述水平固定框211且与之固连,水平固定框211 与竖直固定框201垂直;
64.本实施例中,口罩发放装置包括三种移动结构;
65.前后移动结构:所述水平固定框211左侧边框处固设有前后移动底座218,前后移动底座218上设有水平设置且能够转动的第一螺杆212,所述前后移动底座218上设有第一滑块213,所述第一螺杆212穿过所述第一滑块213且与之螺纹连接,所述第一滑块213能够在所述前后移动底座218上滑动;第一螺杆212通过第一电机驱动转动,由于第一螺杆212与第一滑块213螺纹配合连接,且第一滑块213为矩形;因此,当第一螺杆212转动时,第一滑块213在螺纹的带动下,在前后移动底座218上前后移动;
66.左右移动结构:所述第一滑块213上侧固设有左右移动底座219,左右移动底座219上设有水平设置且能够转动的第二螺杆215,所述左右移动底座219上设有第二滑块216,所述第二螺杆215穿过所述第二滑块216且与之螺纹连接,所述第二滑块216能够在所述左右移动底座219上滑动,所述第一螺杆212长度方向与所述第二螺杆215的长度方向垂直;第一滑块213与左右移动底座219左端固连;本实施例中的第二螺杆215通过第二电机214驱动转动,第二螺杆215与第二滑块 216螺纹配合连接,且第二滑块216为矩形;因此,当第二螺杆215转动时,在螺纹的带动下,第二滑块216在左右移动底座219上左右移动;
67.上下移动结构:参见图2-4所示,所述第二滑块216后侧固设有上下移动底座302,上下移动底座302上设有竖直设置且能够转动的第三螺杆404,所述上下移动底座302上设有第三滑块403,所述第三螺杆404穿过所述第三滑块403且与之螺纹连接,所述第三滑块403能够在所述上下移动底座302上滑动;本实施例中第三螺杆404通过第三电机217驱动转动,第三螺杆404与第三滑块403螺纹配合连接,且第三滑块403为矩形;因此,当第三螺杆404转动时,在螺纹带动下,第三滑块403在上下移动底座302上上下移动;所述第三滑块403与一吸盘402通过连杆固连(参见图4所示),该吸盘402开口向下,所述吸盘402与微型负压泵 401通过管路连接;通过水平设置的第一螺杆212和第二螺杆215以及竖直设置的第三螺杆404,实现了第一滑块213前后移动,第二滑块216左右移动,第三滑块 403的上下移动,进而实现了吸盘402能够前后左右上下全方位移动。
68.所述第三滑块403下侧设有若干口罩盒209,便于装新口罩,所述口罩盒209 前侧设有弧形导向板210,所述口罩出口104下侧边高度与导向板210靠近于口罩出口104的一端
高度相同,便于新口罩能够滑出口罩出口104。
69.进一步的,所述吸盘402上设有压力传感器,便于精确掌控吸盘402吸取口罩时的压力情况,避免为吸到口罩或者口罩掉落等现成出现。
70.进一步的,参见图2-5所示,所述口罩发放装置后侧且位于所述水平固定框上设有支撑台501,所述微型负压泵401位于该支撑台501上,所述微型负压泵401 吸入口与所述吸盘402连接。
71.进一步的,参见图2-5所示,所述竖直固定框201右侧设有消毒瓶203,所述支撑台501上设有静音泵202,所述静音泵202与所述消毒口203连通。本实施例中,消毒口203处设有消毒传感器,当消毒传感器检测到使用者手靠近且停留时,消毒传感器传输信息给控制模块,随后控制模块启动静音泵202,消毒喷雾从消毒口102喷出,进行消毒。
72.进一步的,参见图2-5所示,所述竖直固定框201下端与一底板205固连,所述竖直固定框201上设有支撑板204,该支撑板204位于所述底板205上侧,所述底板205与所述支撑板204之间还设有若干支撑杆208,提高服务机器人的稳定性;
73.所述底板205上设有两个对称设置的主动轮206,该主动轮206通过设置在底板205上侧的主动电机207驱动;所述底板205下侧设有两个对称设置的从动轮 301;通过控制系统控制主动电机207启动,并通过事先设定好的路线行进。
74.进一步的,参见图2-7所示,所述旧口罩回收消毒装置包括设置在支撑台501 上的回收箱,所述回收箱内设有紫外激光器703,所述回收箱与所述开关门105 连通。所述回收箱包括引导仓701,所述引导仓701与斜向下设置的消毒管路连通,所述消毒管路远离所述引导仓701的一端与收纳仓706顶部连通,所述收纳仓706与所述开关门105连通;
75.所述引导仓701底部设有出风口702,该出风口702与所述微型负压泵401出气口连通,所述出风口702出风方向向左;
76.所述消毒管路内部上下两侧均设有两个对称设置的反射镜704,两个反射镜 704相对外侧设有若干均匀排布的散热凸起705;所述消毒管路内部下侧壁上设有紫外激光器703,该紫外激光器703位于下侧反射镜704右侧,所述紫外激光器 703射出激光方向与水平线夹角15
°
。当废旧口罩进入引导仓701内时,由于引导仓701靠近于反射镜704的侧壁从左至右向下倾斜设置,废旧口罩直接滑落至出风口702处,此时的微型负压泵401正处于工作状态(此时吸盘402处于吸取新口罩阶段),微型负压泵401出口排风,进而使出风口702出风;紫外激光器703 射出紫外线,由于紫外激光器703射出紫外线的方向与水平线呈一定角度,可通过两个平行对称设置的反射镜704进行多次折射紫外线;废弃口罩在出风口702 的作用下,进入两个反射镜704之间,在多次折射的紫外线作用下,对废弃口罩以及出风口吹出的风进行消菌杀毒;若干散热凸起705的作用下,避免反射镜704 过热。由于消毒管路倾斜设置,且反射镜704表面光滑,避免废弃口罩堆积在消毒管路内部的现象发生。
77.本实施例中的服务机器人工作时分为口罩发放阶段、消毒阶段、废旧口罩回收消毒阶段和移动阶段;参见图1-7所示,具体的:
78.口罩发放阶段:本实施例壳体101口罩出口104处设有人体感应传感器,当人体感应传感器检测到距离小于5cm物体时,机器人停止移动,控制模块开始记录并累加时间,当时间保持5s后,控制模块控制第一电机、第二电机214和第三电机217驱动吸盘402进入口罩盒209内准备吸取新口罩(口罩盒209内设有第一红外传感器,当口罩盒209内的第一红外传
感器检测到无口罩后,吸盘402自动进入下一个口罩盒209内);当吸盘402下压至新口罩表面后,触发压力传感器,控制模块启动微型负压泵401,在吸力的作用下,吸盘402完成新口罩的吸取;随后控制吸盘402移动至导向板210处,关闭微型负压泵401,新口罩掉落至导向板210上,使用者从口罩出口104处取出新口罩。
79.消毒阶段:当消毒传感器检测到人体靠近时,控制模块控制机器人停止移动;手停留在消毒传感器时间超过3s后,启动静音泵202,从消毒瓶203中抽取消毒液并从消毒口102喷出,完成双手消毒。
80.废旧口罩回收消毒阶段:废旧口罩进入引导仓701并自动滑落至出风口702 处,启动微型负压泵401(微型负压泵出气口与出风口702连通),出风口702 开始排风,在风力的持续作用下,废旧口罩进入消毒管路内;此时紫外激光器 703启动并射出紫外线,紫外线在两个反射镜704的作用下,在两个反射镜704 之间多次折射,废旧口罩从消毒管路内移动的过程中,对废旧口罩多角度消菌杀毒,同时也对出风口702排出的风进行消毒;随后经过杀毒的废旧口罩掉落至收纳仓706内,便于对废旧口罩集中处理;回收箱内结构的设置,避免废旧口罩二次污染环境,有效防止了疾病与细菌的传播。
81.移动阶段:机器人内部设有gps定位系统,根据不同应用场所设置移动路线,确保更多的人能够得到机器人的服务。
82.实施例2
83.参见图8所示,本实施例提供一种小型多功能服务机器人的控制系统,包括主控制模块、消毒模块、回收消毒模块、口罩发放模块和路径规划模块;
84.所述主控模块用于接收信息并传输指令给消毒模块、回收消毒模块、口罩发放模块和路径规划模块;
85.所述消毒模块包括红外传感器单元和真空泵单元,所述消毒模块用于接收主控制模块指令并控制真空泵单元启闭;
86.所述回收消毒模块用于接收主控制模块指令并传输给紫外线单元,所述紫外线单元用于对废旧口罩消毒;
87.所述口罩发放模块用于发放口罩,所述路径规划模块用于规划服务机器人的移动路线。
88.进一步的,所述口罩发放模块包括气泵吸取单元、口罩检测单元、人体感应单元和移动单元;
89.所述人体感应单元用于感应使用者距离,将传输信息至主控制模块。
90.进一步的,所述路径规划模块包括gps定位单元、自动回充单元、超声波传感器单元和防碰撞单元。gps定位单元根据会场或使用场所环境,事先制定好运行轨道,出中途需要消毒或口罩发放情况,在指定地点会有1-5分钟停留;自动回充单元检测到机器人电池容量不足时,发送信息给主控模块,通过主控模块发出指令,机器人返回充电;超声波传感器当检测到2米范围内有障碍物时,传输信息给主控模块,主控模块发出指定,控制机器人进行避让;防碰撞单元用于防止近距离发生紧急情况或机器人发生碰撞时,机器人立即停止移动。
91.以上所述的仅为本发明的优选实施例,所应理解的是,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想,并不用于限定本发明的保护范围,凡在本发明的
思想和原则之内所做的任何修改、等同替换等等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1