一种喷涂机器人动态补喷控制系统、方法以及断点回复控制系统、方法
1.本发明涉及船舶建造辅助设备,具体是涉及一种喷涂机器人动态补喷控制系统、方法以及断点回复控制系统、方法。
背景技术:
2.目前大型船舶分段的喷涂大多数采用人工搭建脚手架的方式进行喷涂,采用人工喷涂方法暴露出诸多问题,比如:作业效率低、喷涂漆膜厚度不均匀、操作工人劳动强度大以及危害操作工人的身心健康等问题。故人工喷涂已经逐渐被各式各样喷涂机器人所取代。
3.针对大型船舶分段的喷涂,喷涂机器人末端喷枪所需要的轨迹主要由两种方式产生:人工示教编程与离线编程。而这两种方法现在都面临着一个问题,在喷涂过程中,当喷枪遇到堵塞时,需要进行人工清堵。在喷涂过程中,喷枪在轨迹里堵塞的位置是任意的,操作工人将喷枪移动到清堵的位置也是任意的,所以在待操作工人清堵结束后不仅需要将喷枪按照原路径返回到断点位置。而且同时面临着一个问题,当喷枪开始淤堵时到完全堵塞直至到达触发压力传感器需要一定的时间,但在这过程中喷枪沿着轨迹依旧再运动,由于喷枪淤堵的原因,喷枪喷出油漆的喷炬已经与没有淤堵时的喷炬完全不同,形成的漆膜厚度也随时间不断变化,从而使得喷涂的效果质量也大大的下降。
技术实现要素:
4.发明目的:针对以上缺点,本发明提供一种改善喷涂的效果质量的喷涂机器人动态补喷控制系统、方法以及断点回复控制系统、方法。
5.技术方案:为解决上述问题,本发明采用一种喷涂机器人动态补喷控制系统,包括喷涂机器人和喷涂目标,喷涂机器人包括进行喷涂的喷枪,喷枪管道中设置压力传感器,其特征在于,还包括数据采集模块、计算模块、控制模块;
6.所述数据采集模块用于采集喷涂机器人喷枪发生淤堵过程时,喷枪管道实时的压力数据;
7.所述计算模块用于根据压力数据得到喷枪喷嘴实时的喷涂截面积;根据实时的喷涂截面积计算得到喷枪发生淤堵过程中,喷涂目标上的漆膜厚度随时间的变化关系;并计算喷枪发生淤堵过程中喷涂机器人的移动路程;
8.所述控制模块用于控制喷枪堵塞的喷涂机器人停止喷涂,控制清堵后的喷涂机器人移动至喷枪发生淤堵的初始位置;并根据喷涂目标上的漆膜厚度,控制喷涂机器人进行补偿喷涂。
9.进一步的,所述计算模块对喷枪喷嘴实时的喷涂截面积进行归一化处理。
10.本发明还采用一种喷涂机器人动态补喷控制方法,包括以下步骤:
11.(1)采集喷涂机器人喷枪发生淤堵过程时,喷枪管道实时的压力数据,根据压力数
据暂停喷涂,同时得到喷枪喷嘴实时的喷涂截面积;
12.(2)根据实时的喷涂截面积计算得到喷枪发生淤堵过程中喷涂目标上的漆膜厚度随时间的变化关系;
13.(3)计算喷枪发生淤堵过程中喷涂机器人的移动路程;
14.(4)控制清堵后的喷涂机器人移动至喷枪发生淤堵的初始位置;
15.(5)根据喷涂目标上的漆膜厚度,控制喷涂机器人进行补偿喷涂
16.进一步的,对所述步骤(1)中喷枪喷嘴实时的喷涂截面积进行归一化处理:
[0017][0018]
其中,为归一化后的喷涂截面积;xi为喷枪喷嘴实时的喷涂截面积,x
min
为喷枪喷嘴最小的喷涂截面积;x
max
为喷枪喷嘴最大的喷涂截面积。
[0019]
进一步的,所述步骤(2)中喷涂目标上的漆膜厚度的计算公式为:
[0020][0021]
其中,qf喷涂目标上的漆膜厚度,q
l
为喷涂在平面上的漆膜厚度,α为喷涂目标表面与对应平面的夹角。
[0022]
进一步的,通过控制喷涂机器人液压泵的流量从而控制喷枪的沉膜厚度,液压泵的流量q为:
[0023][0024]
其中,h0为喷涂目标的理想膜厚,s为喷枪喷嘴的截面积。
[0025]
进一步的,所述步骤(3)中喷涂机器人移动路程l的计算公式为:
[0026]
l=vt0[0027]
其中,v为喷涂机器人的移动速度,t0为喷涂机器人喷枪淤堵的时间。
[0028]
进一步的,所述步骤(4)中的初始位置坐标y为:
[0029]
y=y
0-l
[0030]
其中,y0为喷涂机器人喷涂的断点位置坐标。
[0031]
本发明还采用一种喷涂机器人动态补喷控制系统的断点回复控制系统,包括位置记忆模块、计数模块、寻路模块和返回控制模块,所述位置记忆模块用于喷涂机器人喷枪发生堵塞关闭后实时记录喷涂机器人的位置坐标,所述计数模块用于对位置记忆模块记录位置坐标的次数进行计数,所述寻路模块用于喷涂机器人根据位置记忆模块记录的位置坐标依次返回,且此时计数模块计数递减,所述返回控制模块用于给寻路模块发送返回信号。
[0032]
本发明还采用一种喷涂机器人动态补喷控制系统的断点回复控制方法,包括以下步骤:
[0033]
(1)喷涂机器人喷枪发生堵塞后关闭,移动喷涂机器人至喷枪清堵位置,实时记录喷涂机器人的位置坐标,并对记录位置坐标的次数进行计数;
[0034]
(2)对喷枪进行清堵,清堵结束后发送返回信号;
[0035]
(3)喷涂机器人根据记录的位置坐标依次返回,并将计数依次递减直至清零停止
到达断点位置,然后进行补偿喷涂。
[0036]
有益效果:本发明相对于现有技术,其显著优点是当喷枪遇到堵塞时,可以自动暂停喷涂的程序并将喷枪关闭,避免了压力过大导致喷涂管道损坏与喷涂漏喷现象的发生,改善了整体的喷涂效果。根据喷枪管道压力数据得到喷涂目标喷涂厚度,从而进行动态补喷,使得从开始淤堵的位置到堵塞的位置的喷涂质量大大的改善,从而达到期望的膜厚要求。
[0037]
在对喷枪进行清堵,操作工人手动移动喷涂机器人时,自动依次记录喷涂机器人的位置坐标。当操作工人喷枪清堵结束后,操作工人触发外部的返回信号,喷涂机器人可以依次自动返回记录的位置坐标。避免了在喷涂机器人在移动过程中发生碰撞现象的发生,使得断点回复的过程更加的安全与方便,操作工人只需要触发一个外部信号,便可以自动返回到断点位置,这样大大提高了工作的效率。通过是自动检测是否达到断点位置,到达的位置坐标精确。
附图说明
[0038]
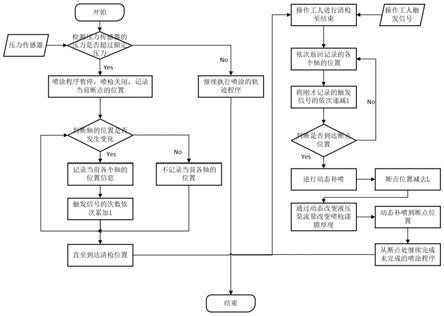
图1本发明喷涂机器人喷枪断点回复与续喷方法的流程图;
[0039]
图2为本发明大型船舶分段喷涂机器人工作情况示意图;
[0040]
图3本发明中压力传感器测量数据随时间的变化曲线图;
[0041]
图4本发明中喷枪喷嘴的截面积随着时间的变化曲线;
[0042]
图5本发明中喷枪喷嘴未堵塞时的喷涂的漆膜厚度曲线图;
[0043]
图6本发明中从开始淤堵到完全堵塞时膜厚随时间的变化曲线图;
[0044]
图7本发明中动态改变液压泵输出流量后喷枪膜厚随时间变化曲线图;
[0045]
图8本发明的各硬件连接组态接线图;
[0046]
图9本发明各模块连接示意图。
具体实施方式
[0047]
实施例1
[0048]
如图2、图8和图9所示,本实施例中的一种喷涂机器人动态补喷控制系统,包括喷涂机器人和喷涂目标,喷涂机器人包括进行喷涂的喷枪,喷枪管道中设置压力传感器,还包括数据采集模块、计算模块、控制模块;本实施例中喷涂机器人的喷涂系统采用cp505/a控制器、机器人控制器、驱动器以及伺服电机等,采用ethercat总线协议进行通讯,完成喷涂机器人系统的组态,从而为喷涂机器人喷枪断点回复与动态补喷的方法的实现提供了基础。
[0049]
喷涂机器人喷涂系统的组态步骤为:
[0050]
s1:机器人控制器中加装ethercat通讯板块,通过机器人对应的软件激活ethercat通讯板块的密钥,修改机器人控制器底层文件,达到机器人控制器可以进行ethercat总线协议通讯;
[0051]
s2:配置符合ethercat总线协议通讯下驱动器以及机器人控制器的xml描述文件,以便在进行组态时可以读取到驱动器以及机器人控制器的相关信息,从而便于组态;
[0052]
s3:将cp(微机)的以太网调整到与cp505/a控制器同一网段;
[0053]
s4:用cp505/a控制器的软件进行组态,将s2中生成的xml文件添加到库文件中并进行安装;
[0054]
s5:添加所需要的驱动器的数量,使之与外部真实驱动器的数量相等。从而可以让虚拟的驱动器与外部真实的驱动器一一对应,从而完成系统的组态。
[0055]
s6:喷涂机器人的d-h矩阵、各个关节的限位、附加轴的行程及限位、速度等参数的配置;
[0056]
s7:将驱动轴一一分配给真实的机器人轴以及外附加轴。
[0057]
通过以上步骤完成了喷涂机器人喷涂系统的组态,使得喷枪可以完成点到点、直线、圆弧等一系列动作,为喷涂机器人喷枪的断点回复与动态补喷奠定了良好的基础,可以对需要被喷涂的复杂曲面进行轨迹的编程,从而执行程序完成待喷涂表面的喷涂。
[0058]
在喷涂机器人喷涂系统的基础上设置数据采集模块用于采集喷涂机器人喷枪发生淤堵过程时,喷枪管道实时的压力数据;设置计算模块用于根据压力数据得到喷枪喷嘴实时的喷涂截面积,并对喷枪喷嘴实时的喷涂截面积进行归一化处理;根据实时的喷涂截面积计算得到喷枪发生淤堵过程中,喷涂目标上的漆膜厚度随时间的变化关系;并计算喷枪发生堵塞过程中喷涂机器人的移动路程;设置控制模块用于控制喷涂机器人停止喷涂,控制喷涂机器人移动至喷枪发生淤堵的初始位置;并根据喷涂目标上的漆膜厚度,控制喷涂机器人进行补偿喷涂。使用ethercat总线通讯协议进行通讯,使得在进行组态时变得更加容易,进行数据的交换更加方便。
[0059]
实施例2
[0060]
如图1所示,本实施例中的一种喷涂机器人动态补喷控制方法,采用上述实施例中的喷涂系统组态及控制系统,控制方法包括以下步骤:
[0061]
(1)当喷涂机器人的喷枪从开始淤堵到完全堵塞时,由于液压泵输出功率恒定,喷枪喷嘴的截面积s随着时间减小,管道里的压力p随着时间不断增大,安装在喷枪管道内的压力传感器压力会慢慢上升直至到达临界压力,采集喷涂机器人喷枪发生淤堵过程时,喷枪管道实时的压力数据,压力传感器的压力变化如图2所示,到达临界压力时触发压力传感器发出信号给plc,根据压力数据暂停当前喷涂的轨迹程序并关闭喷枪的液压泵,同时得到喷枪喷嘴实时的喷涂截面积;当喷枪遇到堵塞时,可以自动暂停喷涂的程序并将喷枪关闭,避免了压力过大导致喷涂管道损坏与喷涂漏喷现象的发生,改善了整体的喷涂效果。
[0062]
可以得到喷枪喷嘴的截面积随着时间的变化曲线如图3所示。并将喷枪喷嘴实时的喷涂截面积进行归一化处理:
[0063][0064]
其中,为归一化后的喷涂截面积;xi为喷枪喷嘴实时的喷涂截面积,x
min
为喷枪喷嘴最小的喷涂截面积;x
max
为喷枪喷嘴最大的喷涂截面积。
[0065]
(2)根据实时的喷涂截面积计算得到喷枪发生淤堵过程中喷涂目标上的漆膜厚度随时间的变化关系;喷枪未堵塞时的膜厚曲线如图4所示,从喷枪开始淤堵到堵塞时的膜厚随时间的变化曲线如图5所示;喷涂目标上的漆膜厚度的计算公式为:
[0066]
[0067]
其中,qf喷涂目标上的漆膜厚度,q
l
为喷涂在平面上的漆膜厚度,α为喷涂目标表面与对应平面的夹角。
[0068]
(3)计算喷枪发生淤堵过程中喷涂机器人的移动路程;喷涂机器人移动路程l的计算公式为:
[0069]
l=vt0[0070]
其中,v为喷涂机器人的移动速度,t0为喷涂机器人喷枪堵塞的时间。
[0071]
(4)将断点处的坐标值减去移动路程l,从而得到喷枪开始淤堵时的位置,控制喷涂机器人移动至喷枪发生堵塞的初始位置;初始位置坐标y为:
[0072]
y=y
0-l
[0073]
其中,y0为喷涂机器人喷涂的断点位置坐标。
[0074]
(5)根据喷涂目标上的漆膜厚度,控制喷涂机器人进行补偿喷涂直至运动到断点处,通过动态的控制液压泵的流量从而动态的改变喷枪的沉膜厚度,从而完成从喷枪开始淤堵到完全堵塞这段距离的漆膜厚度补偿喷涂;进行动态补偿的漆膜厚度随时间的变化曲线如图6所示,最终达到补喷的厚度能够满足期望的要求;
[0075]
液压泵的流量q为:
[0076][0077]
其中,h0为喷涂目标的理想膜厚,s为喷枪喷嘴的截面积。
[0078]
(6)当执行到断点的位置时,喷涂机器人继续沿着断点位置执行喷涂轨迹程序,并且液压泵的流量保持之前的流量继续喷涂。通过动态补喷使得从开始淤堵的位置到堵塞的位置的喷涂质量大大的改善,从而达到期望的膜厚要求,这是人工在进行补喷作业中几乎不可能达到的精度,通过动态补喷的处理,可以达到要求。
[0079]
实施例3
[0080]
本实施例中的一种喷涂机器人动态补喷控制系统的断点回复控制系统,在上述实施例1的基础上还包括位置记忆模块、计数模块、寻路模块和返回控制模块,位置记忆模块用于喷涂机器人喷枪发生堵塞关闭后实时记录喷涂机器人的位置坐标,计数模块用于对位置记忆模块记录位置坐标的次数进行计数,寻路模块用于喷涂机器人根据位置记忆模块记录的位置坐标依次返回,且此时计数模块计数递减,返回控制模块用于给寻路模块发送返回信号。
[0081]
实施例4
[0082]
如图1所示,本实施例中一种喷涂机器人动态补喷控制系统的断点回复控制方法,包括以下步骤:
[0083]
(1)喷枪管道内到达临界压力后暂停当前喷涂的轨迹程序并关闭喷枪的液压泵,记录此时断点的位置坐标;
[0084]
(2)操作工人手动移动喷涂机器人至对喷枪进行清堵的位置,实时记录喷涂机器人的位置坐标,并对记录位置坐标的次数进行计数;
[0085]
(2)对喷枪进行清堵,当清堵完成后,操作工人触发返回信号,本实施例中采用按钮触发;
[0086]
(3)接收到返回信号后,喷涂机器人根据记录的位置坐标依次返回,并将计数依次
递减直至清零停止到达断点位置,然后进行上述实施例2中的动态补偿喷涂。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1