一种多行程选择的伸缩机械手的制作方法
1.本发明属于机械手相关领域,更具体地说,涉及一种多行程选择的伸缩机械手。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
3.现在的机械手一般应用于加工制造业中,而在加工制造业中有许多大体积的产品,或是在大型设备中使用机械手,因此对于机械手的行程长度、范围等都要求较高,而现有的机械手为了控制成本、重量和能耗等指标,难以提高机械手的运动行程,因此在部分加工生产厂景中难以满足使用需求。
技术实现要素:
4.本发明要解决的技术问题在于提供一种多行程选择的伸缩机械手,它设置了气缸连接组件与加长伸缩组件,气缸连接组件为通过一个气泵同时控制多个气缸,从而能够节约驱动的能耗,也便于动力的控制,加长伸缩组件能够二次伸缩,并在未伸缩时收纳于伸缩臂内,节约了空间,二次伸缩后大幅度的扩大了夹持装置的可夹持范围,更具实用性。
5.本发明的一种多行程选择的伸缩机械手,包括翻转块、移动块、伸缩臂、伸长块、夹持装置、气缸连接组件和加长伸缩组件;移动块设于翻转块顶端,移动块与翻转块伸缩连接,伸缩臂设于移动块顶端,伸缩臂与移动块转动连接,伸长块设于伸缩臂右端,伸缩臂与伸长块伸缩连接,伸长块的后端转动设有夹持装置,夹持装置用于进行夹持与放松动作;气缸连接组件包括动力端、连接部件与限位部件,连接部件与动力端通过管道连接,连接部件分别与伸长块与翻转块固定连接,进而通过动力端控制伸长块与伸缩臂、翻转块与移动块的伸缩,限位部件固定设于移动块顶端,伸缩臂在移动块上转动运动时,管道会同步运动,限位部件内设有弹性元件,通过弹性元件限位管道的运动;加长伸缩组件设于伸缩臂内,加长伸缩组件包括初次伸缩部件与二次伸缩部件,初次伸缩部件与伸缩臂滑动连接,二次伸缩部件通过磁性可拆卸设于初次伸缩部件内,二次伸缩部件与初次伸缩部件滑动连接,初次伸缩部件与二次伸缩部件依次伸缩滑动。
6.作为本发明的进一步改进,连接部件包括垂直气缸和水平气缸,垂直气缸的固定端固定设于移动块左端,翻转块的左端面固定设有固定块,垂直气缸的伸长端与固定块固定连接,水平气缸的固定端固定设于伸缩臂顶端,伸长块顶端固定设有水平连接块,水平气缸的伸长端与水平连接块固定连接。
7.作为本发明的进一步改进,动力端包括气泵,气泵固定设于移动块左端面,气泵位于垂直气缸上侧,气泵顶端的出气端设有电磁阀,电磁阀顶端固定设有固定气管与运动气管,固定气管与垂直气缸连通,运动气管与水平气缸连通,电磁阀用于控制固定气管和运动
气管的连通状态。
8.作为本发明的进一步改进,限位部件包括固定座,固定座固定设于移动块左端面,固定座位于气泵上侧,固定座顶端铰接有扭簧杆,扭簧杆与固定座的铰接处设有连接扭簧,运动气管位于扭簧杆左侧,连接扭簧用于推动扭簧杆向运动气管一侧翻转,扭簧杆顶端转动设有导向轮,导向轮与运动气管接触。
9.作为本发明的进一步改进,初次伸缩部件包括初次伸缩杆,伸缩臂右端面开设有初次伸缩腔,初次伸缩杆与初次伸缩腔滑动连接,初次伸缩杆右端与伸长块固定连接,初次伸缩杆左端面设有倾斜面,倾斜面设有上下两侧。
10.作为本发明的进一步改进,二次伸缩部件包括连接块,初次伸缩杆左端面开设有二次伸缩腔,连接块与二次伸缩腔滑动连接,二次伸缩腔内固定设有磁吸副,磁吸副设有磁性部分与磁吸部分,磁吸副的磁吸部分与初次伸缩腔右壁固定连接,磁吸副的磁性部分与连接块右端面固定连接,磁吸副的磁性部分与磁吸部分在相互靠近时自动吸附,连接块左端固定设有限位块,限位块与初次伸缩腔内壁滑动连接。
11.作为本发明的进一步改进,初次伸缩腔的上下壁分别滑动设有弹块,两侧弹块相互远离的一端固定设有弹簧,弹簧用于推动相应的弹块向相互靠近的一侧滑动,初次伸缩杆位于两侧弹块之间时,两侧弹块被限位于初次伸缩腔的上下壁内,初次伸缩杆滑动至远离伸缩臂的一端时,两侧弹块伸出至初次伸缩腔内并将限位块限位。
12.作为本发明的进一步改进,翻转块下侧设有底座、转动座和支撑板,转动座转动设于底座顶端,底座内固定设有第一电机,第一电机的输出轴与转动座固定连接,支撑板固定设于转动座顶端,支撑板后端固定设有第二电机,第二电机的输出轴与翻转块固定连接,第二电机用于带动翻转块绕着第二电机转动,移动块右侧设有有电动推杆,电动推杆的固定端与移动块右端面铰接,电动推杆的伸缩端与伸缩臂铰接,伸长块后端固定设有第三电机,第三电机的输出轴与夹持装置固定连接,第三电机用于带动夹持装置绕着第三电机转动,第一电机、第二电机、电动推杆、气泵、电磁阀、第三电机和夹持装置均通过外界电力与控制系统进行控制。
13.相比于现有技术,本发明的优点在于:(1)本方案设置了气缸连接组件与加长伸缩组件,气缸连接组件为通过一个气泵同时控制多个气缸,从而能够节约驱动的能耗,也便于动力的控制,加长伸缩组件能够二次伸缩,并在未伸缩时收纳于伸缩臂内,节约了空间,二次伸缩后大幅度的扩大了夹持装置的可夹持范围,更具实用性。
14.(2)本方案设置了垂直气缸与水平气缸,能够分别控制两个方向的伸缩,也同时能够在两个方向上同时进行伸缩。
15.(3)本方案设置了导向轮,导向轮与运动气管接触,并且通过扭簧的力带动导向轮将运动气管压紧,进而便于运动气管的稳定运作。
16.(4)本方案通过磁吸副与弹块对加长伸缩组件进行限位,进而使二次伸缩时,限位块位于初次伸缩腔内进行辅助导滑,进而提高了二次伸缩的稳定性。
附图说明
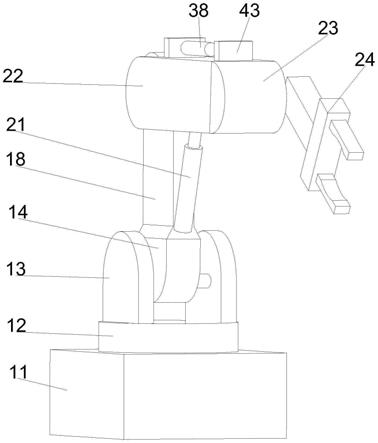
17.图1为本发明的整体结构示意图;
图2为本发明的立体结构示意图图3为图1的a的结构放大示意图;图4为图1的b的结构放大示意图;图5为图3的c的结构放大示意图;图6为图4的d 的结构放大示意图。
18.图中标号说明:11、底座;12、转动座;13、支撑板;14、翻转块;15、第一电机;16、第二电机;17、固定块;18、移动块;19、垂直气缸;20、导向柱;21、电动推杆;22、伸缩臂;23、伸长块;24、夹持装置;25、第三电机;26、初次伸缩腔;27、连接块;28、初次伸缩杆;29、限位块;30、磁吸副;31、弹块;32、弹簧;33、气泵;34、固定气管;35、电磁阀;37、运动气管;38、水平气缸;39、扭簧杆;40、导向轮;41、连接扭簧;42、固定座;43、水平连接块;44、二次伸缩腔。
具体实施方式
19.具体实施例一:请参阅图1-6的一种多行程选择的伸缩机械手,包括翻转块14、移动块18、伸缩臂22、伸长块23、夹持装置24、气缸连接组件和加长伸缩组件;移动块18设于翻转块14顶端,移动块18与翻转块14伸缩连接,伸缩臂22设于移动块18顶端,伸缩臂22与移动块18转动连接,伸长块23设于伸缩臂22右端,伸缩臂22与伸长块23伸缩连接,伸长块23的后端转动设有夹持装置24,夹持装置24用于进行夹持与放松动作;气缸连接组件包括动力端、连接部件与限位部件,连接部件与动力端通过管道连接,连接部件分别与伸长块23与翻转块14固定连接,进而通过动力端控制伸长块23与伸缩臂22、翻转块14与移动块18的伸缩,限位部件固定设于移动块18顶端,伸缩臂22在移动块18上转动运动时,管道会同步运动,限位部件内设有弹性元件,通过弹性元件限位管道的运动;加长伸缩组件设于伸缩臂22内,加长伸缩组件包括初次伸缩部件与二次伸缩部件,初次伸缩部件与伸缩臂22滑动连接,二次伸缩部件通过磁性可拆卸设于初次伸缩部件内,二次伸缩部件与初次伸缩部件滑动连接,初次伸缩部件与二次伸缩部件依次伸缩滑动。
20.连接部件包括垂直气缸19和水平气缸38,垂直气缸19的固定端固定设于移动块18左端,翻转块14的左端面固定设有固定块17,垂直气缸19的伸长端与固定块17固定连接,水平气缸38的固定端固定设于伸缩臂22顶端,伸长块23顶端固定设有水平连接块43,水平气缸38的伸长端与水平连接块43固定连接。
21.动力端包括气泵33,气泵33固定设于移动块18左端面,气泵33位于垂直气缸19上侧,气泵33顶端的出气端设有电磁阀35,电磁阀35顶端固定设有固定气管34与运动气管37,固定气管34与垂直气缸19连通,运动气管37与水平气缸38连通,电磁阀35用于控制固定气管34和运动气管37的连通状态。
22.限位部件包括固定座42,固定座42固定设于移动块18左端面,固定座42位于气泵33上侧,固定座42顶端铰接有扭簧杆39,扭簧杆39与固定座42的铰接处设有连接扭簧41,运动气管37位于扭簧杆39左侧,连接扭簧41用于推动扭簧杆39向运动气管37一侧翻转,扭簧杆39顶端转动设有导向轮40,导向轮40与运动气管37接触。
23.翻转块14下侧设有底座11、转动座12和支撑板13,转动座12转动设于底座11顶端,
底座11内固定设有第一电机15,第一电机15的输出轴与转动座12固定连接,支撑板13固定设于转动座12顶端,支撑板13后端固定设有第二电机16,第二电机16的输出轴与翻转块14固定连接,第二电机16用于带动翻转块14绕着第二电机16转动,移动块18右侧设有有电动推杆21,电动推杆21的固定端与移动块18右端面铰接,电动推杆21的伸缩端与伸缩臂22铰接,伸长块23后端固定设有第三电机25,第三电机25的输出轴与夹持装置24固定连接,第三电机25用于带动夹持装置24绕着第三电机25转动,第一电机15、第二电机16、电动推杆21、气泵33、电磁阀35、第三电机25和夹持装置24均通过外界电力与控制系统进行控制。
24.通过外界电力与控制系统控制第一电机15的输出轴转动从而能够带动转动座12在底座11顶端转动,通过外界电力与控制系统控制第二电机16的输出轴转动从而能够带动翻转块14绕着第二电机16翻转摆动,当需要伸长移动块18的高度时,通过外界电力与控制系统启动气泵33,并通过电磁阀35控制固定气管34处于连通状态,从而将气体充入垂直气缸19内使垂直气缸19伸长,此时通过导向柱20与移动块18的滑动连接,从而推动移动块18向上移动,从而伸长移动块18的高度,当需要伸长伸长块23时,通过外界电力与控制系统控制电磁阀35与运动气管37连通,从而带动水平气缸38伸长,通过水平气缸38的伸长从而推动水平连接块43移动,此时通过初次伸缩杆28与初次伸缩腔26内壁的滑动连接,从而带动伸长块23伸长,从而扩大夹持装置24的夹紧范围,同时通过外界电力与控制系统控制第三电机25转动,从而能够带动夹持装置24转动,同时通过外界电力与控制系统能够单独控制电动推杆21的伸缩,从而通过移动块18与伸缩臂22的转动连接,带动伸缩臂22绕着与移动块18的连接点翻转摆动,当伸缩臂22翻转摆动时,运动气管37处于自由状态,此时通过连接扭簧41的扭簧力推动扭簧杆39向运动气管37一侧翻转,从而推动导向轮40将运动气管37张紧,进而防止运动气管37随意摆动而影响气泵33与水平气缸38之间的连通,电磁阀35能够同时连通固定气管34与运动气管37,从而同时驱动伸长块23与移动块18伸长。
25.具体实施例二:在具体实施例一的基础上,一种多行程选择的伸缩机械手,初次伸缩部件包括初次伸缩杆28,伸缩臂22右端面开设有初次伸缩腔26,初次伸缩杆28与初次伸缩腔26滑动连接,初次伸缩杆28右端与伸长块23固定连接,初次伸缩杆28左端面设有倾斜面,倾斜面设有上下两侧。
26.二次伸缩部件包括连接块27,初次伸缩杆28左端面开设有二次伸缩腔44,连接块27与二次伸缩腔44滑动连接,二次伸缩腔44内固定设有磁吸副30,磁吸副30设有磁性部分与磁吸部分,磁吸副30的磁吸部分与初次伸缩腔26右壁固定连接,磁吸副30的磁性部分与连接块27右端面固定连接,磁吸副30的磁性部分与磁吸部分在相互靠近时自动吸附,连接块27左端固定设有限位块29,限位块29与初次伸缩腔26内壁滑动连接。
27.初次伸缩腔26的上下壁分别滑动设有弹块31,两侧弹块31相互远离的一端固定设有弹簧32,弹簧32用于推动相应的弹块31向相互靠近的一侧滑动,初次伸缩杆28位于两侧弹块31之间时,两侧弹块31被限位于初次伸缩腔26的上下壁内,初次伸缩杆28滑动至远离伸缩臂22的一端时,两侧弹块31伸出至初次伸缩腔26内并将限位块29限位。
28.当需要进一步伸长伸长块23时,通过气泵33持续进气,从而通过运动气管37的连接带动水平气缸38持续伸长,水平气缸38的伸长带动水平连接块43移动,从而带动伸长块23伸长,通过伸长块23的持续伸长从而带动初次伸缩杆28持续向初次伸缩腔26外滑动,此时由于磁吸副30处于吸附状态,从而带动限位块29跟随初次伸缩杆28滑动,此时当初次伸
缩杆28的两侧倾斜面移动至两侧弹块31之间时,初次伸缩杆28无法继续限位弹块31,通过两侧弹簧32的推力从而推动两侧弹块31向下移动至初次伸缩腔26内,此时两侧弹块31将限位块29限位,同时通过初次伸缩杆28的持续移动,从而使磁吸副30克服磁吸力而分离,从而带动连接块27在二次伸缩腔44内滑动,此时位于初次伸缩腔26内的连接块27与限位块29为初次伸缩杆28的滑动提供支撑力与导向。当需要收回初次伸缩杆28从而进行复位时,通过气泵33抽吸水平气缸38内的气体,从而带动水平气缸38收缩,从而带动初次伸缩杆28移动复位至初次伸缩腔26内,此时初次伸缩杆28左端面的两侧倾斜面与两侧弹块31导滑,从而推动上下两侧弹块31分别克服两侧弹簧32的推力而向上复位,此时磁吸副30靠近后相互吸附,从而推动限位块29移动复位至初次伸缩腔26的内侧。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1