一种模块化可移动机器人
1.本发明属于机械加工领域,特别是一种模块化可移动机器人。
背景技术:
2.对于空间站航天器舱体、能源、船舶等领域大型零件的高效加工一直是制造业发展的重点,由于需求的提升,所需零件的尺寸也在不断增大,已经超出现有机床的工作空间,并且固定安装的机床无法满足室外、野外环境的加工需求。可移动式加工机器人可以解决这一问题。目前大多可移动式机器人都是移动模块和机身组合在一起,限制了大型构件内部型腔的加工。如cn207014345u所公布的一种移动工业机器人,串联机械臂安装在agv小车上实现加工模块的可移动,但是串联结构刚度差、运动精度不高,无法满足更加精密加工的需求。如cn108621114a所公布的一种面向大型结构件加工的移动式机器人,串联模块和五自由度并联机构组成的机械臂安装在agv小车上,可实现加工机器人的大范围移动,完成大型结构件复杂曲面的数控加工。由于该机构的移动和固定依靠agv小车,所以无法进行大型构件内部表面加工。如cn101890643a所公布的一种超大构件可移动加工机床,所述机构是在并联机构静平台上延伸出两条轮式可移动腿,可以实现机身移动,但是工件某一方向上的尺寸会受到机身大小的约束,并且只能加工工件外表面。如cn110509067a所公布的一种大型复杂构件原位吸附式加工多机器人,所述的机构由一个三自由度吸附装置和五自由度并联机构两个并联模块组成,可以实现大型构件顶部安装面加工,所述的机构复杂,无法在大型构件内部进行工作,并且只能吸附在光滑面上工作,在一些特殊工况环境下无法应用。
技术实现要素:
3.本发明的目的在于提供一种模块化可移动机器人,部件可以进行车铣钻磨加工,还可以进行一些特种加工(如激光切割、3d打印等);面对大型构件,其内部和外部表面均可原位加工。
4.实现本发明目的的技术解决方案为:
5.一种模块化可移动机器人,由操作平台模块、支撑连接件模块、末端执行器模块、与操作平台模块连接的三套以上的复合驱动支链模块组成;其特征在于,
6.无专用的静平台,由支撑连接件模块连接固定件构成静平台;
7.所述复合驱动支链模块包括支撑座(1)、被动转轴(2)、角度传感器(11)、第一驱动组件、第二驱动组件、球铰链组件;
8.所述第一驱动组件包括第一推动杆(6a)、第一连接组件(7)、第一驱动单元(3a)、与第一驱动单元(3a)相连的第一套筒(5a);所述第一推动杆(6a)的一端通过移动副与第一套筒(5a)连接,所述第一推动杆(6a)的另一端与第一连接组件(7)固连;
9.所述第二驱动组件包括第二推动杆(6b)、第二连接组件(8)、第二驱动单元(3b)、与第二驱动单元(3b)相连的第二套筒(5b);所述第二推动杆(6b)的一端通过移动副与第一
套筒(5b)连接,所述第二推动杆(6b)的另一端与第二连接组件(8)固连;
10.被动转轴(2)通过转动副安装在支撑座(1)上,角度传感器(11)设置在支撑座(1)上,用于测量被动转轴(2)的转角变化,再结合第一驱动单元(3a)和第二驱动单元(3b)的位置反馈信息求解末端执行器模块和静平台之间的位姿关系;
11.所述第一驱动组件的第一驱动单元(3a)和所述第二驱动组件的第二驱动单元(3b)分别通过第一转轴(4a)和第二转轴(4b)与被动转轴(2)相连接,第一转轴(4a)的轴线和第二转轴(4b)的轴线相互平行,第一转轴(4a)和第二转轴(4b)的轴线与被动转轴(2)的轴线垂直并相交;
12.第一连接组件(7)与第二连接组件(8)之间通过转动副相连,连接第一连接组件(7)和第二连接组件(8)的转动副轴线与转轴(4a)的轴线平行;
13.所述第一连接组件(7)末端通过球铰组件与支撑连接件模块连接;
14.所述复合驱动支链模块与操作平台模块之间为可拆卸结构,用于实现复合驱动支链模块与操作平台模块的多模态重构;所述末端执行器模块与操作平台模块通过螺纹连接;
15.工作时,将静平台作为基准,控制末端执行器模块的六维运动,通过控制复合驱动支链模块中第一推动杆(6a)和第二推动杆(6b)的伸缩量,以调整安装在操作平台模块上末端执行器模块的位置和姿态,实现原位加工。
16.本发明与现有技术相比,其显著优点是:
17.(1)以操作平台为基准可以反求静平台位姿,这是目前并联机器人所不具备的特性,这样就不用专用的静平台,可以灵活地搭建到任何位置,具有很好的可移动性,因此其工作空间不受任何的限制,极大地扩充了其加工能力。
18.(2)并联的复合驱动支链与操作平台模块可拆卸组装,去除了传统意义上的机身,使得该机器人可以任意调整加工位置,灵活性更高,大型工件和小型工件均可加工,不仅可以在大型工件外表面进行加工,大型工件内部的加工需求也可以满足,同时,复合驱动支链模块的可拆性使得在加工过程中可以变换支链位置,重新寻找操作平台的最佳受力点,提高运动稳定性;
19.(3)操作平台与末端执行机构可拆卸组装,可以满足多种加工工序需求,不仅可以满足车、铣、钻、磨加工,还可以实现一些特种加工需求,如激光切割、3d打印等;
20.(4)支撑连接件的多样性使得该机器人应对外部环境变化的能力提高,将其换成锥钉插入地下,换成吸盘可以吸附在圆柱面上,换成磁铁块可以吸在铁块上。
附图说明
21.图1(a-e)为本发明实施例1的结构示意图。
22.图2为本发明实施例2的结构示意图。
23.图3为本发明实施例2的局部剖视图。
24.图4为本发明实施例3的结构示意图。
25.图5为本发明实施例3工作状态1的位置布置示意图。
26.图6为本发明实施例3工作状态2的位置布置示意图。
27.图7为本发明实施例4的结构示意图。
28.图8为本发明实施例5的结构示意图。
具体实施方式
29.下面结合附图及具体实施例对本发明做进一步的介绍。
30.实施例1
31.如图1(a)、(b)、(c)、(d)、(e)所示,本实施例中一种便携式可移动机器人,包括操作平台模块和连接在操作平台模块上的三个以上的复合驱动支链模块;所述复合运动支链包括轴支撑座1、被动转轴2、两个驱动组件(第一驱动组件和第二驱动组件)、轴承支座9、虎克铰10和角度传感器11;所述被动转轴2与轴支撑座1通过转动副连接;所述第一驱动组件包括第一推动杆6a、第一连接组件7、第一电机3a、与第一电机3a相连的第一套筒5a和;所述第一推动杆6a的一端与第一套筒5a通过移动副连接,所述第一推动杆6a的另一端与第一连接组件7固连;所述第一电机3a用于驱动第一推动杆6b沿第一套筒5b伸缩。所述第二驱动组件包括第二推动杆6b、第二连接组件8、第二电机3b、与第二电机3b相连的第二套筒5b和;所述第二推动杆6b的一端与第二套筒5b通过移动副连接,所述第一推动杆6b的另一端与第二连接组件8固连;第二电机3b用于驱动第二推动杆6b沿第二套筒5b伸缩。
32.第一连接组件7与第二连接组件8之间通过转动副相连,连接第一连接组件7和第二连接组件8的转动副轴线与转轴4a的轴线平行;
33.所述第一驱动组件的第一驱动单元3a和所述第二驱动组件的第二驱动单元3b分别通过第一转轴4a和第二转轴4b与被动转轴2相连接,第一转轴4a的轴线和第二转轴4b的轴线相互平行,第一转轴4a和第二转轴4b的轴线与被动转轴2的轴线垂直并相交;
34.所述轴承支座9与第一铰链组件通过螺栓固定在一起;所述虎克铰10与轴承支座9通过转动副连接;所述角度传感器11通过螺母固定在轴承支座1上,用于测量被动转轴2的转角变化,结合电机的旋转角度,即可获得末端的虎克铰的位置。
35.所述复合驱动支链模块由操作平台侧端的定位销13进行定位,通过螺栓固定在i类操作平台12或者ⅱ类操作平台14上,完成连接后的结构分别如图1(a)、(e)所示;所述复合驱动支链另一端的虎克铰可固定在平面上构成静平台;i类操作平台12为切角的等边三角形平台,可固定三个复合驱动支链模块,ⅱ类操作平台14为矩形平台,可固定四个复合驱动支链模块。
36.由复合驱动支链模块中角度传感器的角度信息、第二推动杆6b和第一推动杆6a的位置信息可以根据末端执行器反求静平台的位姿,工作时再将静平台作为基准,控制末端执行器的六维运动。
37.通过控制复合驱动支链模块中第一推动杆和第二推动杆的伸缩量,可以调整安装在操作平台模块上末端执行器的位置和姿态(三个平移运动和三个转动运动),实现原位加工。
38.实施例2
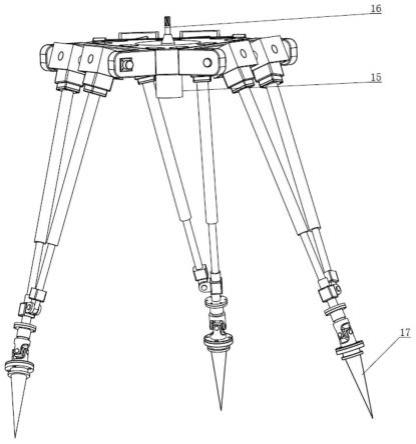
39.如图2所示,本实施例是在实例1的基础上添加了末端执行器模块和支撑连接件模块;所述末端执行器模块包括电机15、铣刀16;所述电机15通过螺栓固定在操作平台12上;所述铣刀16与电机15连接;所述支撑连接件模块为锥钉17,其通过螺栓固定在虎克铰10上。锥钉17可以插进地下构成并联机器人的静平台,其局部剖视图如图3所示。
40.实施例3
41.如图4所示,本实施例是在实例2的基础上,将末端执行器模块的铣刀16换成钻头19;所述支撑连接件模块为吸盘18,通过螺栓固定在虎克铰上。吸盘可以吸附在光滑面上,与之构成静平台,不仅可以在大型工件外表面工作,还可以进入其内部进行加工,如图5、图6所示的工作状态。
42.实施例4
43.如图7所示,本实施例是在实例2的基础上,将末端执行器模块的铣刀16换成手爪21;所述支撑连接件模块为磁铁块20,通过螺栓固定在虎克铰上。手爪可以夹取工件,进行工件进给运动,朝固定好的刀具(如车刀)移动,磁铁块可以吸附在具有磁性的大型工件加工面上,与之构成静平台。
44.实施例5
45.如图8所示,本实施例是在展示在加工过程成中可以调整机构位置,找到更合适的受力位置,从而提高其稳定性。实线为原本的加工位置,虚线为调整一条支链后的加工位置。
46.所述末端执行器还可以为砂轮、3d打印喷头或一些特种加工的刀具等;
47.上述第一电机3a、第二电机3b也可采用带有减速器的电机、气压系统或液压系统。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1