机器人机械臂随动控制录制系统的制作方法
1.本发明属于机电制造领域,涉及了一种机器人机械臂随动控制录制系统。
背景技术:
2.在现有的机器人机械臂中,以工业生产机械臂,微型表演机器人,挖掘机机械臂最为典型,其中工业生产机械臂,微型表演机器人均以程序员写好的程序运行,程序员编程复杂。挖掘机机械臂则靠操作员不断的控制挖掘机机械臂的液压缸正反动作,来实现挖掘机的动作,每个液压缸的正反动作,以及动作时间都需要操作员精确把握,操作过程必须经验丰富,否则难以完成动作。
3.本发明直接使用角度模拟量发送器,在控制端发送一个模拟量,在工作端还原模拟量,使工作设备轻松完成动作,不再需要手动精准的控制每个动作设备的正反动作,以及动作时间,更加高效的完成工作,电子信号类型的模拟量可以直接存储进电脑,不用进行坐标类型的编程,存储的模拟量信号还可以由ai 调用,比较我们现有的编程方法根据更加快捷。
技术实现要素:
4.为了克服上述现有技术的不足,本发明提供了一种机器人机械臂随动控制录制系统。本发明所采用的技术方案是:在两个支架中间的活动位置,装有角度模拟量发送器,连接有线、无线遥控设备或4g、 5g移动通信设备,向ai电脑系统或对应的随动机械关节发送角度模拟量,使对应的随动机械关节做出相同动作的一种系统。在以旋转为目的的机械臂上,则是以固定端的旋转半径线视为支架,以活动端的旋转半径线视为另一支架(半径线指的是:在机械臂旋转做圆周运动时,以该圆周长上取一个点至圆心的线为半径线,固定端的旋转半径线则是以活动端的半径线为参照物,作反向动作,以此取出半径线),在两个支架的中心活动处装有角度模拟量发送器。其中ai电脑系统的作用是进行录制存储以及调用,存储以及调用方法由模拟量信号和ai算法决定。在实际应用过程中,该系统可以由多个组成一个总系统,每个系统对应一个人体关节,由人体穿戴固定后用人体关节的动作,控制对应随动机械关节动作。也可以脱离人体关节,改为在旁拖动使用。在旁拖动使用时,直接拖动需要动作的几个角度模拟量发送器,对应的随动机械关节就可以做出相同动作了。在机器人机械臂随动控制录制系统的远程控制设备上装有远程摄像音频设备,用于反馈设备的实时状态。
5.在以旋转为目的的机械臂上,我们转动活动一端的控制支架,使其与固定端的旋转半径线产生角度,于是角度模拟量发送器,就会向对应随动机械关节发送角度模拟量,使对应随动机械关节做出相同动作。
6.角度模拟量发送器可以选用:舵机测试仪对应随动机械关节为舵机,信号为pwm。或编码器对应的随动机械关节为步进电机,信号为脉冲。或液压输出设备对应的随动机械关节为液压动作设备,信号为液压体积量。或电位器对应的随动机械关节为磁力转换机械
能装置,信号为电压。角度模拟量发送器也可以选用其它具有模拟量特征的设备,发出的模拟量可以通过另一设备进行还原,就可以实现本系统的功能。
7.随动机械关节可以直接作用于机器人关节上,也可以使用随动机械关节的动作一端支架触碰触动开关,控制液压或大型电机做正反转动作,并来实现以小带大的方案,从而减轻成本。
8.当角度模拟量发送器选用编码器时对应的随动机械关节为步进电机,编码器向步进电机发送电脉冲,每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。以此来实现步进电机与编码器的同步动作。
9.当角度模拟量发送器选用电位器时对应的随动机械关节为磁力转换机械能装置,磁力转换机械能装置最经典的实物例子就是指针式电压表,当电位器给磁力转换机械能装置一个模拟量电压时,磁力转换机械能装置就会按照电位器给的电压模拟量,还原出电位器给的角度,以此来实现电位器与磁力转换机械能装置的同步动作,在本例中如果磁力转换机械能装置力量不够大,或者造价昂贵时,可以选择使用随动机械关节的动作一端支架触碰触动开关,控制液压或大型电机做正反转动作,并来实现以小带大的方案,从而减轻成本。
10.在使用液压设备时,机械臂最为简洁,我们使用液压输出设备(例如液压油缸,油泵)利用支架动作,使液压输出设备通过液压油管挤出或吸入一定量的液压油,液压油会随着支架动作幅度的变化而变化我们把它称为液压体积量,液压体积量会使对应的液压动作设备(例如液压油缸)做出与液压输出设备相同的动作,因为人体的力量比较小,我们一般采用随动机械关节的动作一端支架(液压动作设备)触碰触动开关,控制液压或普通大功率电机做正反转动作,来实现以小带大的方案,从而减轻成本。这类有线设备比较适用类似机甲、挖掘机这类设备,来简化操作的复杂程度。
11.以上例举了角度模拟量发送器与随动机械关节,完成同步动作的重要依据,来说明使用在两个支架中间的活动位置,装有角度模拟量发送器,通过有线、无线遥控设备或4g、5g移动通信设备,向ai电脑系统或对应随动机械关节发送角度模拟量,使对应随动机械关节做出相同动作的一种系统,是确实可行的。
12.本技术中名词解释:
13.角度模拟量发送器:角度模拟量发送器是一种当两个支架产生角度时,就会产生一个量,这个量会随着角度的变化而变化,这也是角度模拟量发送器的最大特征。
14.随动机械关节:随动机械关节是还原模拟角度模拟量的一种设备,主要用于还原角度模拟量发送器发送过来的角度模拟量,当收到这个量时,会随着量的变化而变化。
15.与现有技术相比,本发明的有益效果是:直接使用角度模拟量控制器,在控制端发送一个模拟量,在工作端还原模拟量,使工作设备轻松完成动作,不再需要手动精准的控制每个动作设备的正反动作,以及动作时间,更加高效的完成工作,电子信号类型的模拟量可以直接存储进电脑,不用进行坐标类型的编程,存储的模拟量信号还可以由ai调用,比较我们现有的编程方法根据更加快捷。下面我们举例说明一下,比如普通的表演机器人有26个自由度,就是相当于有26个关节,如果使用现有技术控制每个关节的正反动作,以及动作时间,显然普通人是无法完成的,如果使用本发明,只需要将每个角度模拟量控制器装在人体
对应位置,对应随动机械关节就可以完成相应动作,26个自由度对应人体26个关节,就可以完成极为复杂的动作,而且对操作者的要求非常低,确切的说只要会动就可以。
16.现有技术在对机器人编程时,也是需要程序员对26个自由度中的每个自由度进行编程的,非常繁琐,使用本发明可以直接录入模拟量信号,26个可以同时进行,普通人就可以进行录制操作。
17.在实际使用中该控制录制系统简化了,我们完全用手去控制机械臂各个关节的动作幅度,使用人体各关节去控制机器人的各个关节,使机器人的动作与人体动作一致,把原先复杂专业的操作流程变得简单明了。同理,除液压、液压体积量信号外,其他模拟量信号均可在电脑中存储,存储的信号可以由人工智能调出使用。使用机器人按存储的模拟量信号恢复成一整套动作,在军事、生活、生产中发挥巨大的作用。
18.机器人机械臂控制录制系统的应用场景:该系统可以应用到挖掘机、机甲、远程控制机器人、车间工作生产的机械臂等各种应用场景。挖掘机使用了该系统后,只需要在驾驶室内操作缩小比例的挖掘机机械臂操纵杆,就可以操挖掘机机械臂工作,而且操作方法非常简单,只需使驾驶室内的缩小比例的操纵杆动作,外面外部的机械臂,就可以完成相同动作。使原先复杂专业的操作,变得轻松简单,使挖掘的工作成本下降,在挖掘机使用该技术时,我们一般采用在两个支架中间的活动位置,装有角度模拟量发送器,通过线路向对应的随动机械关节发送角度模拟量,使对应随动机械关节的动作一端支架触碰触动开关,控制液压或普通大功率电机做正反转动作,这一技术来实现方案。同理这一技术在调整构造后也可以应用于机甲这军事装备上。
19.机甲本身是一个外来词,网络上普遍认为,单兵机甲,即为大型机械外骨骼,作为重武器的重型机甲由于材料和脆弱的关节限制,性价比上完全不如坦克,飞机,无人机等设备。虽然不可能在普通战场上出现,但出现在高海拔的藏区,以及残酷的巷战地区应该是非常实用的。
20.该系统应用到车间工作生产的机械臂时,我们采用在两个支架中间的活动位置,装有角度模拟量发送器,通过线路向ai电脑系统发送进行录制存储,录制完成的信号可以由ai电脑系统进行调用,向对应随动机械关节发送角度模拟量,使对应随动机械关节,做出相同动作的这一技术,在车间生产线上,生产相同产品时一般动作步骤基本都是一样的,我们只需要操作控制一端,将操作控制一端各个角度模拟量发送器的角度模拟量,发送至ai电脑系统进行录制存储,ai电脑系统就可以重复输出同一动作步骤了,这样的编程方法非常简单高效,关键是编程成本非常低。这种重复的机械动作可以非常有力的解决我们工人的劳动强度。
21.该系统应用到远程控制机器人时,我们采用在两个支架中间的活动位置,装有角度模拟量发送器,通过5g移动通信设备,向对应的随动机械关节发送角度模拟量,使对应的随动机械关节的动作一端支架触碰触动开关,控制液压或普通大功率电机做正反转动作,做出相同动作的这一技术来实现,远程控制机器人可以制造成微型、轻型、中型、大型、重型
[0022] 该系统还可以应用到社会福利方面,比如假肢,普通假肢是不可以按人体的意愿进行动作的,使用该系统后,可以利用手指的动作来控制腿假肢的动作,
[0023]
综上所述机器人机械臂随动控制录制系统在生产生活中,可以替代我们完成高空作业、深井作业、剧毒环境作业等各种高风险环境作业,还可以利用人工智能记录各种生产
动作,去完成枯燥繁琐的生产任务。是一款非常理想的军事、生产、生活设备。
附图说明
[0024]
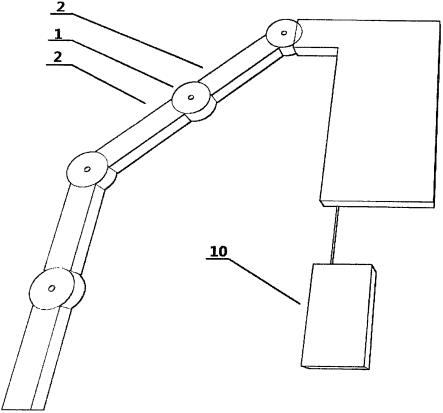
图1是机器人机械臂随动控制录制系统图
[0025]
图2是机器人机械臂随动控制录制系统发射端图
[0026]
图3是机器人机械臂随动控制录制系统接收端图
[0027]
1.(1)角度模拟量发送器
[0028]
2.(2)支架
[0029]
3.(3)机械臂
[0030]
4.(4)普通大功率电机
[0031]
5.(5)随动机械关节
[0032]
6.(6)随动机械关节的动作一端
[0033]
7.(7)触动开关
[0034]
8.(8)5g移动通信设备接收端
[0035]
9.(9)ai电脑系统
[0036]
10.(10)5g移动通信设备模拟量发射端
具体实施方案
[0037]
使用两个支架(2),在中间的活动位置,装上角度模拟量发送器(1),角度模拟量发送器(1)可以选用:舵机测试仪对应随动机械关节(5)为舵机,信号为pwm。或编码器对应的随动机械关节(5)为步进电机,信号为脉冲。或液压输出设备对应的随动机械关节(5)为液压动作设备,信号为液压体积量。或电位器对应的随动机械关节(5)为磁力转换机械能装置,信号为电压。通过有线、无线遥控设备,4g、 5g移动通信设备,向ai电脑系统(9)或对应随动机械关节(5)发送角度模拟量,使对应随动机械关节 (5)做出相同动作的一种系统。在以旋转为目的的机械臂上,是以固定端的旋转半径线视为支架(2),以活动端的旋转半径线视为另一支架(2)。在两个支架(2)的中心活动处装有角度模拟量发送器(1)时,我们转动活动一端的控制支架,使其与固定端的旋转半径线产生角度,于是角度模拟量发送器,就会向对应随动机械关节(5)发送角度模拟量,使对应随动机械关节(5)做出相同动作角度。其中ai电脑系统 (9)的作用是进行录制存储以及调用,在实际应用过程中,该系统可以由多个组成一个总系统,每个系统对应一个人体关节,由人体穿戴固定后用人体关节的动作,控制对应随动机械关节(5)动作。也可以脱离人体关节,改为在旁拖动使用。
[0038]
为了实现远程控制,我们选用现在非常成熟的5g远程视频影音设备,安装在机器人机械臂随动控制录制系统的远程控制设备上,用于反馈设备的实时状态。更有利于我们进行实时操作。
[0039]
本发明中我们选用舵机测试仪配合舵机,来进行具体实施方案说明,我们在两个支架(2)中间加装一个舵机测试仪为一组,此时的舵机测试仪就是角度模拟量发送器(1),随动机械关节为舵机,附图中使用若干组组成一个总系统,将若干组的pwm信号分成两路,一路由5g移动通信设备模拟量发射端(10),通过5g移动通信设备接收端(8)进入电脑,由电脑记录各个舵机测试仪的波宽和时长等信息,另一路由 5g移动通信设备模拟量发射端
(10),通过5g移动通信设备接收端(8)直接控制由随动机械关节(5)和普通大功率电机(4)组成的机器人,使随动机械关节(5)带动随动机械关节的动作一端支架(6)触碰触动开关(7),控制普通大功率电机做正反转动作,从而实现以小舵机带动大电机,进行随动操作。触动开关(7)一般有2个,我们可以把它理解为正反转开关,当触碰到正转开关时普通大功率电机(4)正转,当触碰到反转开关时普通大功率电机(4)反转,当随动机械关节的动作一端支架(6)停在中位时,不触碰任伺开关,普通大功率电机(4)不动作。以此来实现该系统的同步动作。
[0040]
在实际应用中,角度模拟量发送器(1)可以选用:舵机测试仪对应随动机械关节(5)为舵机,信号为pwm。或编码器对应的随动机械关节(5)为步进电机,信号为脉冲。或液压输出设备对应的随动机械关节(5)为液压动作设备,信号为液压体积量。或电位器对应的随动机械关节(5)为磁力转换机械能装置,信号为电压。角度模拟量发送器(1)也可以选用其它具有模拟量特征的设备,发出的模拟量可以通过另一设备进行还原,就可以实现本系统的功能。
[0041]
所有上述说明用来解释说明本发明,而不是对本发明进行限制。在本发明的精神和权利要求的保护范围内,对本发明作出任何修改和改变,都落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1