图书馆智能巡检机器人
1.本技术涉及图书馆技术领域,具体而言,涉及图书馆智能巡检机器人。
背景技术:
2.相关技术中,巡检机器人能够进行自定位、路径规划、智能感知、人脸识别、视频监控等行为,可以协助完成馆内的监控巡逻保安工作,实现动态巡检、无死角监控、异常预警,有效避免人工巡检的各种弊端。
3.一般,图书馆智能巡检机器人通过高清摄像头和红外成像探测器进行周围环境的巡检,但是,高清摄像头和红外成像探测器缺少相应的保护结构处于裸露状态,智能巡检机器人在夜晚或者充电无工作时,容易沾染灰尘,同时外物意外撞击也容易造成损坏。
技术实现要素:
4.本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提出图书馆智能巡检机器人,所述图书馆智能巡检机器人具有保护其上高清摄像头和所述红外成像探测器的效果。
5.根据本技术实施例的图书馆智能巡检机器人,包括:巡检机器人组件、防护组件和防撞组件。
6.所述巡检机器人组件包括机器人本体和巡检设备本体,所述巡检设备本体由高清摄像头和红外成像探测器组成,所述防护组件包括防护件和第一驱动件,所述防护件包括防护盖和连接板,所述连接板固定连接于所述防护盖一端的侧壁,所述连接板铰接于所述巡检设备本体顶端,所述防护盖能够罩住所述高清摄像头和所述红外成像探测器,所述第一驱动件包括第一伸缩驱动杆、第一耳板、第二耳板和铰接部,所述第一耳板固定连接于所述巡检设备本体顶端,所述第二耳板固定连接于所述连接板外壁,所述第一伸缩驱动杆均通过所述铰接部铰接于所述第一耳板和所述第二耳板,所述防撞组件设置为多组,多组所述防撞组件设置于所述机器人本体的周边。
7.根据本技术的一些实施例,所述防护盖内壁设置有密封垫,所述密封垫能够罩住所述高清摄像头和所述红外成像探测器,所述密封垫设置为清洁海绵。
8.根据本技术的一些实施例,所述铰接部包括铰接螺杆和限位螺母,所述限位螺母螺纹套接于所述铰接螺杆端部,所述第一伸缩驱动杆两端均通过所述铰接螺杆铰接于所述第一耳板和所述第二耳板。
9.根据本技术的一些实施例,所述铰接螺杆一端的外壁和所述限位螺母外壁均设置有防滑条。
10.根据本技术的一些实施例,所述巡检设备本体顶端设置有限位件,所述限位件能够支撑住所述连接板外壁。
11.根据本技术的一些实施例,所述限位件包括限位件包括限位杆和缓冲垫,所述缓冲垫固定连接于所述限位杆顶端。
12.根据本技术的一些实施例,所述限位杆上端设置有安装槽,所述缓冲垫下端设置有安装条,所述安装条固定插接于所述安装槽。
13.根据本技术的一些实施例,所述安装槽侧壁螺纹连接有连接螺栓,所述连接螺栓穿过所述安装条。
14.根据本技术的一些实施例,所述缓冲垫设置为聚氨酯垫。
15.根据本技术的一些实施例,所述巡检设备本体侧壁固定连接有定位块,所述定位块能够挡住所述防护盖。
16.根据本技术的一些实施例,所述防撞组件包括缓冲件、防撞件、排气件和滑动件,所述缓冲件包括缓冲外壳、挡圈、缓冲杆和第一压缩弹簧,所述挡圈固定连接于所述缓冲外壳内壁,所述挡圈将所述缓冲外壳内部分为缓冲腔和气腔,所述缓冲腔和所述气腔连通,所述气腔侧壁开设有安装孔,所述缓冲外壳一端连接于所述巡检设备本体周边,所述缓冲杆滑动连接于所述缓冲腔,所述缓冲杆一端延伸出所述缓冲外壳,所述第一压缩弹簧两端分别压紧于所述挡圈和所述缓冲杆,所述防撞件包括防撞板、固定板、连接杆和滑动套筒,所述固定板固定连接于所述防撞板两端,所述连接杆固定连接于所述固定板内壁,所述滑动套筒固定连接于所述连接杆端部,所述缓冲杆延伸出所述缓冲外壳一端的端部固定连接于所述防撞板内壁,所述排气件包括排气套筒、定位环、活塞板、定位杆、固定支架和第二压缩弹簧,所述排气套筒固定插接于所述安装孔,所述定位环固定连接于所述排气套筒内部,所述定位环上设置有透气孔,所述定位杆固定连接于所述活塞板一侧,所述固定支架固定连接于所述排气套筒端部的内壁,所述定位杆滑动贯穿于所述固定支架,所述第二压缩弹簧套接于所述定位杆,所述第二压缩弹簧将所述活塞板压紧于所述定位环,所述活塞板能够封住所述透气孔,所述活塞板上开设有通气孔,所述通气孔和所述透气孔连通,所述滑动件包括第一安装板、第二安装板和滑杆,所述第一安装板和所述第二安装板固定连接于所述滑杆两端,所述第一安装板和所述第二安装板固定连接于所述缓冲外壳外壁,所述滑动套筒滑动套接于所述滑杆。
17.根据本技术的一些实施例,所述缓冲杆包括杆体和两个滑板,两个所述滑板固定连接于所述杆体一端,两个所述滑板滑动连接于所述缓冲腔。
18.根据本技术的一些实施例,所述活塞板远离所述定位杆一侧设置有密封环,所述活塞板将所述密封环压紧于所述透气孔周边。
19.根据本技术的一些实施例,所述巡检设备本体周边固定连接有第一基座,所述缓冲外壳远离所述缓冲杆一端固定连接有第三耳板,所述第三耳板铰接于所述第一基座,所述缓冲外壳靠近所述第三耳板一端的外壁固定连接有第四耳板,所述巡检设备本体上侧固定连接有安装架,所述安装架包括两个立板和两个铰接套筒,两个所述立板固定连接于所述巡检设备本体上侧,两个所述铰接套筒固定连接于两个所述立板上端的侧壁,两个所述铰接套筒之间设置有第二驱动件,所述第二驱动件包括第二伸缩驱动杆、铰接杆和第二基座,所述铰接杆固定连接于所述第二伸缩驱动杆外壁,所述铰接杆铰接于所述铰接套筒,所述第二基座固定连接于所述第二伸缩驱动杆输出端,所述第二基座铰接于所述第四耳板,所述防撞板外壁的下侧设置有滚动部,所述滚动部包括第三基座和滚轮,所述滚轮转动连接于所述第三基座。
20.根据本技术的一些实施例,所述立板侧壁和所述巡检设备本体上侧之间设置有加
加强板;370-第二驱动件;371-第二伸缩驱动杆;372-铰接杆;373-第二基座。
具体实施方式
26.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
27.为使本技术实施方式的目的、技术方案和优点更加清楚,下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。
28.下面参考附图描述根据本技术实施例的图书馆智能巡检机器人。
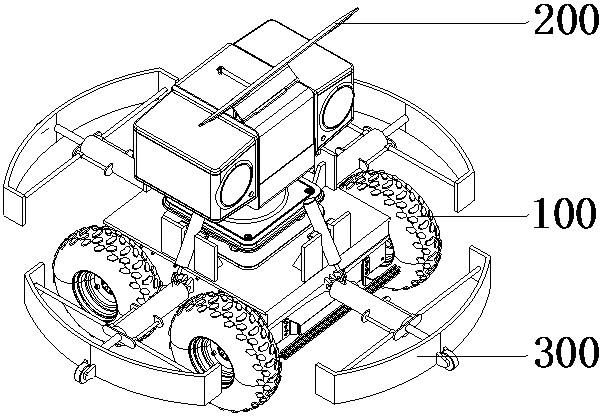
29.如图1-图14示,根据本技术实施例的图书馆智能巡检机器人,包括:巡检机器人组件100、防护组件200和防撞组件300,巡检机器人组件100用于图书馆内巡检,防护组件200用于防护巡检机器人组件100上的高清摄像头和红外成像探测器,防撞组件300用于减少巡检机器人组件100和书架之间的撞击。
30.如图2示,巡检机器人组件100包括机器人本体110和巡检设备本体120,巡检设备本体120由高清摄像头和红外成像探测器组成。高清摄像头、红外成像探测器和机器人本体110之间的具体设置方式为本技术领域人员已知,在此不详细叙。
31.如图3示,防护组件200包括防护件210和第一驱动件220,防护件210包括防护盖211和连接板212。连接板212固定连接于防护盖211一端的侧壁,其中,连接板212和防护盖211为一体式结构。连接板212铰接于巡检设备本体120顶端,防护盖211能够罩住高清摄像头和红外成像探测器。防护盖211内壁设置有密封垫213,密封垫213能够罩住高清摄像头和红外成像探测器,密封垫213设置为清洁海绵。通过清洁海绵保护高清摄像头和红外成像探测器减少灰尘落于其上。巡检设备本体120侧壁固定连接有定位块240,定位块240能够挡住防护盖211。通过定位块240限制防护盖211摆下的角度,使防护盖211保护高清摄像头和红外成像探测器的同时减少防护盖211压损高清摄像头和红外成像探测器的情况。
32.如图4示,第一驱动件220包括第一伸缩驱动杆221、第一耳板222、第二耳板223和铰接部224。第一耳板222固定连接于巡检设备本体120顶端,第二耳板223固定连接于连接板212外壁。第一伸缩驱动杆221均通过铰接部224铰接于第一耳板222和第二耳板223。当需要保护巡检设备本体120上的高清摄像头和红外成像探测器时,启动第一伸缩驱动杆221,第一伸缩驱动杆221推动第一耳板222,第一耳板222带动连接板212绕铰接处摆动,连接板212带动防护盖211摆下罩住高清摄像头和红外成像探测器。通过防护盖211保护高清摄像头和红外成像探测器,减少智能巡检机器人在夜晚或者充电无工作时,高清摄像头和红外成像探测器容易沾染灰尘,同时也减少外物意外撞击造成高清摄像头和红外成像探测器损坏的情况。
33.如图5示,铰接部224包括铰接螺杆2241和限位螺母2242,限位螺母2242螺纹套接于铰接螺杆2241端部,第一伸缩驱动杆221两端均通过铰接螺杆2241铰接于第一耳板222和第二耳板223。将限位螺母2242从铰接螺杆2241上旋下,可将铰接螺杆2241从第一耳板222、第二耳板223以及第一伸缩驱动杆221上抽出,解除第一伸缩驱动杆221两端的铰接,便于更换和维修第一伸缩驱动杆221。铰接螺杆2241一端的外壁和限位螺母2242外壁均设置有防
滑条2243。通过防滑条2243便于旋转铰接螺杆2241和限位螺母2242。
34.如图6示,巡检设备本体120顶端设置有限位件230,限位件230能够支撑住连接板212外壁。通过限位件230支撑连接板212,限制第二耳板223位置,减少第二耳板223贴合于巡检设备本体120顶端,进而减少第一伸缩驱动杆221无法推动连接板212的情况。限位件230包括限位件230包括限位杆231和缓冲垫232,缓冲垫232固定连接于限位杆231顶端。通过缓冲垫232减少限位杆231和连接板212之间的磨损。限位杆231上端设置有安装槽233,缓冲垫232下端设置有安装条234,安装条234固定插接于安装槽233。减少缓冲垫232和限位杆231之间的滑动。安装槽233侧壁螺纹连接有连接螺栓235,连接螺栓235穿过安装条234。通过连接螺栓235便于固定安装条234,拆卸时,解除连接螺栓235,再将安装条234抽出安装槽233,进而取下缓冲垫232。缓冲垫232设置为聚氨酯垫。聚氨酯垫具有良好的耐化学性、回弹性和力学性能,也具有更小的压缩变型性。
35.如图7示,防撞组件300设置为多组,多组防撞组件300设置于机器人本体110的周边。在本实施例中,防撞组件300设置为四组且分别设置于机器人本体110两侧及前后两端。
36.如图8示,相关技术中图书馆智能巡检机器人周边的防撞组件300多通过弹簧进行缓冲,但是弹簧被压缩后,依然会快速回复,造成图书馆智能巡检机器人快速被弹回,产生较大的冲击力,也容易造成图书馆智能巡检机器人撞上其余的物品产生损坏或者图书馆智能巡检机器人失去平衡而倾斜,造成部分轮胎离地的情况。
37.为此,发明人经过长期的实践研究,解决了该技术问题。具体地,防撞组件300包括缓冲件310、防撞件320、排气件330和滑动件340,缓冲件310包括缓冲外壳311、挡圈312、缓冲杆316和第一压缩弹簧317。挡圈312固定连接于缓冲外壳311内壁,其中,挡圈312通过焊接或者一体式固定于缓冲外壳311内壁。挡圈312将缓冲外壳311内部分为缓冲腔313和气腔314,缓冲腔313和气腔314连通。气腔314侧壁开设有安装孔315,缓冲外壳311一端连接于巡检设备本体120周边。缓冲杆316滑动连接于缓冲腔313,缓冲杆316一端延伸出缓冲外壳311,第一压缩弹簧317两端分别压紧于挡圈312和缓冲杆316。缓冲杆316包括杆体3161和两个滑板3162,两个滑板3162固定连接于杆体3161一端,两个滑板3162滑动连接于缓冲腔313。通过两个滑板3162滑动连接于缓冲腔313,保持杆体3161滑动的稳定性。
38.如图9示,防撞件320包括防撞板321、固定板322、连接杆323和滑动套筒324,固定板322固定连接于防撞板321两端,具体的,固定板322和防撞板321为一体式结构。连接杆323固定连接于固定板322内壁,具体的,连接杆323通过焊接固定连接于固定板322内壁。滑动套筒324固定连接于连接杆323端部,在本实施例中,滑动套筒324通过焊接固定连接于连接杆323端部。缓冲杆316延伸出缓冲外壳311一端的端部固定连接于防撞板321内壁,需要时说明的是,缓冲杆316通过螺栓或者焊接固定于防撞板321内壁。
39.如图10示,排气件330包括排气套筒331、定位环332、活塞板333、定位杆334、固定支架335和第二压缩弹簧336。排气套筒331固定插接于安装孔315,定位环332固定连接于排气套筒331内部,定位环332上设置有透气孔,定位杆334固定连接于活塞板333一侧,其中,定位杆334通过螺纹固定连接于活塞板333一侧。固定支架335固定连接于排气套筒331端部的内壁,具体的,固定支架335和排气套筒331为一体式结构。定位杆334滑动贯穿于固定支架335,第二压缩弹簧336套接于定位杆334,第二压缩弹簧336将活塞板333压紧于定位环332。活塞板333能够封住透气孔,活塞板333上开设有通气孔337,通气孔337和透气孔连通。
当防撞板321撞击到书架或者墙壁时,撞击力推动防撞板321及缓冲杆316沿缓冲外壳311滑动,气腔314内的气压增大。气腔314内的气压推动活塞板333离开定位环332,气腔314内的气体通过活塞板333和排气套筒331之间的间隙以及通气孔337快速排出。当防撞板321在第一压缩弹簧317弹力下回复原位时,气腔314内的气压减小,活塞板333在第二压缩弹簧336的弹力作用下回复原位,外界气体通过通气孔337缓慢进入气腔314内平衡气压,进而减缓第一压缩弹簧317回复原位的速度。第一压缩弹簧317带动缓冲杆316和防撞板321缓慢回复。减少图书馆智能巡检机器人被弹簧快速被弹回,产生较大的冲击力,造成图书馆智能巡检机器人撞上其余的物品产生损坏或者图书馆智能巡检机器人失去平衡而倾斜,造成部分轮胎离地的情况。活塞板333远离定位杆334一侧设置有密封环338,活塞板333将密封环338压紧于透气孔周边,通过密封环338提高活塞板333和透气孔之间的密封性。
40.如图11示,滑动件340包括第一安装板341、第二安装板342和滑杆343,第一安装板341和第二安装板342固定连接于滑杆343两端,第一安装板341和第二安装板342固定连接于缓冲外壳311外壁,滑动套筒324滑动套接于滑杆343。防撞板321及缓冲杆316沿缓冲外壳311滑动时,滑动套筒324同步的沿滑杆343滑动,通过滑杆343限制防撞板321及缓冲杆316的转动,保持防撞板321处于水平平衡的状态,减少防撞板321旋转拖地的情况,同时,滑杆343以及缓冲杆316的支撑均通过缓冲外壳311连接,形成单一支撑点保持滑动套筒324和缓冲杆316滑动的同时限制防撞板321的旋转。
41.如图12示,相关技术中图书馆智能巡检机器人带有防撞组件300,在自身的撞击或者人员碰撞,造成图书馆智能巡检机器人失去平衡倾斜,造成部分轮胎离地,防撞组件和其余轮胎支撑图书馆智能巡检机器人,倾斜的图书馆智能巡检机器人不便于回复原有的全部轮胎支撑图书馆智能巡检机器人的情况。
42.为解决上问题,本发明的具体设置方式为:巡检设备本体120周边固定连接有第一基座350,缓冲外壳311远离缓冲杆316一端固定连接有第三耳板318,具体的,第三耳板318和缓冲外壳311通过焊接或者一体式固定连接。第三耳板318铰接于第一基座350,缓冲外壳311靠近第三耳板318一端的外壁固定连接有第四耳板319,巡检设备本体120上侧固定连接有安装架360。安装架360包括两个立板361和两个铰接套筒362,两个立板361固定连接于巡检设备本体120上侧,优选的,两个立板361通过螺栓固定连接于巡检设备本体120上侧。两个铰接套筒362固定连接于两个立板361上端的侧壁。立板361侧壁和巡检设备本体120上侧之间设置有加强板363,通过加强板363提高立板361的强度。
43.如图13示,两个铰接套筒362之间设置有第二驱动件370,第二驱动件370包括第二伸缩驱动杆371、铰接杆372和第二基座373。铰接杆372固定连接于第二伸缩驱动杆371外壁,铰接杆372铰接于铰接套筒362,第二基座373固定连接于第二伸缩驱动杆371输出端,第二基座373铰接于第四耳板319。
44.如图14示,防撞板321外壁的下侧设置有滚动部325,滚动部325包括第三基座3251和滚轮3252,滚轮3252转动连接于第三基座3251。当图书馆智能巡检机器人失去平衡倾斜,造成部分轮胎离地时,启动第二伸缩驱动杆371,第二伸缩驱动杆371推动缓冲外壳311摆动,缓冲外壳311带动防撞板321向地面摆动,防撞板321带动滚轮3252落地,通过滚轮3252支撑机器人本体110。通过防撞板321、缓冲杆316和缓冲外壳311支撑起机器人本体110,使机器人本体110回复平衡状态,同时缓冲杆316可起到缓冲作用,减少机器人本体110被卡住
无法升高较大位置时,第二伸缩驱动杆371推动力过大,造成机器人本体110损坏的情况。通过防撞组件300上防撞板321、缓冲杆316和缓冲外壳311形成支腿,调节机器人本体110自身的平衡状态,使从机器人本体110因外力造成的失去平衡而倾斜的状态恢复平衡状态继续工作。
45.具体的,该图书馆智能巡检机器人的工作原理:当需要保护巡检设备本体120上的高清摄像头和红外成像探测器时,启动第一伸缩驱动杆221,第一伸缩驱动杆221推动第一耳板222,第一耳板222带动连接板212绕铰接处摆动,连接板212带动防护盖211摆下罩住高清摄像头和红外成像探测器。通过防护盖211保护高清摄像头和红外成像探测器,减少智能巡检机器人在夜晚或者充电无工作时,高清摄像头和红外成像探测器容易沾染灰尘,同时也减少外物意外撞击造成高清摄像头和红外成像探测器损坏的情况。
46.当防撞板321撞击到书架或者墙壁时,撞击力推动防撞板321及缓冲杆316沿缓冲外壳311滑动,气腔314内的气压增大。气腔314内的气压推动活塞板333离开定位环332,气腔314内的气体通过活塞板333和排气套筒331之间的间隙以及通气孔337快速排出。当防撞板321在第一压缩弹簧317弹力下回复原位时,气腔314内的气压减小,活塞板333在第二压缩弹簧336的弹力作用下回复原位,外界气体通过通气孔337缓慢进入气腔314内平衡气压,进而减缓第一压缩弹簧317回复原位的速度。第一压缩弹簧317带动缓冲杆316和防撞板321缓慢回复。减少图书馆智能巡检机器人被弹簧快速被弹回,产生较大的冲击力,造成图书馆智能巡检机器人撞上其余的物品产生损坏或者图书馆智能巡检机器人失去平衡而倾斜,造成部分轮胎离地的情况。
47.防撞板321及缓冲杆316沿缓冲外壳311滑动时,滑动套筒324同步的沿滑杆343滑动,通过滑杆343限制防撞板321及缓冲杆316的转动,保持防撞板321处于水平平衡的状态,减少防撞板321旋转拖地的情况,同时,滑杆343以及缓冲杆316的支撑均通过缓冲外壳311连接,形成单一支撑点保持滑动套筒324和缓冲杆316滑动的同时限制防撞板321的旋转。
48.当图书馆智能巡检机器人失去平衡倾斜,造成部分轮胎离地时,启动第二伸缩驱动杆371,第二伸缩驱动杆371推动缓冲外壳311摆动,缓冲外壳311带动防撞板321向地面摆动,防撞板321带动滚轮3252落地,通过滚轮3252支撑机器人本体110。通过防撞板321、缓冲杆316和缓冲外壳311支撑起机器人本体110,使机器人本体110回复平衡状态,同时缓冲杆316可起到缓冲作用,减少机器人本体110被卡住无法升高较大位置时,第二伸缩驱动杆371推动力过大,造成机器人本体110损坏的情况。通过防撞组件300上防撞板321、缓冲杆316和缓冲外壳311形成支腿,调节机器人本体110自身的平衡状态,使从机器人本体110因外力造成的失去平衡而倾斜的状态恢复平衡状态继续工作。
49.需要说明的是,高清摄像头、红外成像探测器、第一伸缩驱动杆221和第二伸缩驱动杆371具体的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘。
50.高清摄像头、红外成像探测器、第一伸缩驱动杆221和第二伸缩驱动杆371的供电及其原理对本领域技术人员来说是清楚的,在此不予详细说明。
51.以上仅为本技术的实施例而已,并不用于限制本技术的保护范围,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。应注意到:相似的标号和字母在
下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1