用于手持式工具机的附件的制作方法
1.本发明涉及一种用于手持式工具机的附件,利用该附件可以将借助匣储存的连接器件,例如螺钉供应给手持式工具机。本发明尤其涉及一种用于手持式工具机的附件,利用该附件可以将储存在匣中的螺钉很大程度上自动化地预输送给手持式工具机并且将其提供用于实施拧紧。
背景技术:
2.在现有技术中已知手持式工具机或用于手持式工具机的附件,该附件将储存在匣中或带中的连接器件预输送并且供应给在手持式工具机中使用,以便因此在很大程度上减轻使用者挑拣和供应连接器件的任务并且能够实现一种连续的拧紧。
3.在此,通常使用的是蓄电池起子机或用于蓄电池起子机的附件,该附件接收固定地保持在条状匣中的螺钉并且通过输送机构在每次旋拧过程中使条状匣逐螺钉地推进,其中,条状匣通常包括塑料带,其通常按计划地被损坏。
4.已知的用类似连接器件,例如铆钉、螺钉或钉子工作的手持工具或者用于该工具的附件通常同样也使用条状匣。
5.然而,这种解决方案尤其具有以下缺点:
[0006]-由于条状匣的按计划的损坏,它们不能再重复使用,并且使用者必须定期购买新的匣;
[0007]-条状匣可能在操作期间缠绕和/或绞住(vertwisten),使得不再确保连接器件的顺利进给;
[0008]-保持在条状匣中的连接器件的锋利的尖端、刃或毛刺未被防护,并且在操作匣或手持式工具机时可能是不舒服的或者甚至伤害使用者;
[0009]-因为市场上存在用于条状匣的不同的专用解决方案,所以通常在零售中不总是储存有或可获得所有变型,这也适用于连接器件的变型,例如在不同的螺钉长度或螺钉直径方面;
[0010]-如果一旦连接器件的进给例如被倾斜延伸的匣带阻挡,则经常将条状匣拉到在输送机构中并且向前卡住,这就需要中断工作过程,以便将匣从输送机构中卸下;
[0011]-从有意义的资源利用方面来看不完全令人满意的是:条状匣不能被重复使用。
技术实现要素:
[0012]
本发明的任务在于,提供一种相对于现有技术改进的用于手持式工具机的附件,该附件至少部分地消除上述缺点,或者至少给出一种相对于现有技术的替代方案。另一任务在于,提供一种用于储存连接器件,优选螺钉的匣,该匣在用于手持式工具机的这种附件中使用。
[0013]
这些任务借助根据本发明的用于手持式工具机的附件来解决。下面还给出本发明的有利构型。
[0014]
根据本发明,一种用于手持式工具机、尤其用于干墙起子机的附件包括以下特征:
[0015]
壳体,该壳体具有第一壳体端部和在轴向方向上相对于第一壳体端部可运动的第二壳体端部;
[0016]
布置在第一壳体端部上的接口,用于接收手持式工具机的被驱动的构件,其中,所述接口尤其设置为用于接收可沿着轴向方向布置的工具批头;
[0017]
布置在第二壳体端部上的匣保持器,用于接收具有固定器件的匣;其中,
[0018]
匣保持器通过运动机构与壳体耦合,使得第二壳体端部朝第一壳体端部的方向的相对运动引起匣保持器从一个工作位置推进到下一个工作位置中,其中,所述推进包括匣保持器相对于壳体的基本上垂直于轴向方向的相对运动。
[0019]
根据本发明的附件能够通过将匣保持器从一个工作位置推进到下一个工作位置中而实现在设计匣时的大的自由度,由此克服了上面所讨论的限制和缺点。
[0020]
尤其,本发明能够使用刚性的、闭合的以及可重复使用的匣,该匣可以装备有任意连接器件。
[0021]
在一个实施例中,第二壳体端部通过沿着轴向方向取向的引导件相对于第一壳体端部支承。
[0022]
在一个实施方式中,引导件构造为,使得第二壳体端部相对于第一壳体端部在垂直于轴向方向的方向上的相对运动被阻止。
[0023]
在一个实施方式中,引导件包括布置在第二壳体端部中的缝隙以及对应地布置在壳体中的保险销,其中,该保险销将第二壳体端部保险在壳体上。
[0024]
在一个实施方式中,运动机构包括锁定机构,其中,锁定机构将匣保持器在其经过相对于壳体的限定的运动幅度之后固定在工作位置中。
[0025]
在一个实施方式中,锁定机构包括布置在壳体侧并且能够绕着旋转中心枢转的卡锁钩,该卡锁钩弹簧弹性地抵着布置在匣保持器侧的齿条预紧。
[0026]
在一个实施方式中,运动机构包括至少一个布置在壳体或匣保持器上的销和至少一个布置在匣保持器或壳体上的对应的销引导件,其中,至少一个销引导件具有至少两个区段,其中,至少一个销引导件的第一区段具有平行于轴向方向的方向分量,而第二区段具有垂直于轴向方向的方向分量。
[0027]
在一个实施方式中,销和至少一个销引导件相对彼此布置成,使得销在第二壳体端部朝第一壳体端部的方向相对运动期间首先被引入到至少一个销引导件的第一区段中并且进一步推进到第二区段中,由此引起匣保持器从一个工作位置推进到下一个工作位置中。
[0028]
在一个实施方式中,匣保持器或壳体具有多个销引导件,其中,这些销引导件垂直于轴向方向彼此错开地并且与匣保持器的工作位置对应地间隔开地布置。
[0029]
在一个实施方式中,接口设置为用于将手持式工具机的被驱动构件的沿着轴向方向作用的旋转传递到工具批头上。
[0030]
在一个实施方式中,第二壳体端部朝第一壳体端部的方向的相对运动克服预紧实现。
[0031]
在一个实施方式中,预紧通过弹簧元件、尤其是沿着轴向方向布置的螺旋弹簧实现。
[0032]
在一个实施方式中,匣保持器具有用于将匣固定在匣保持器中的匣锁定元件。
[0033]
在一个实施方式中,所述匣保持器具有至少一个匣引导装置,用于沿着垂直于轴向方向的方向接收匣。
[0034]
在一个实施方式中,匣锁定元件构造为移动元件,该移动元件能够沿轴向方向在锁定状态与解锁状态之间运动,在所述锁定状态下,匣保持在匣保持器中,在所述解锁状态下,匣能够被引入到匣引导装置中并且能够从匣引导装置中取出。
[0035]
在一个实施方式中,第二壳体端部具有用于工具批头的批头引导件,其中,批头引导件在实施第二壳体端部朝第一壳体端部的方向的相对运动时引导工具批头。
[0036]
根据本发明的一个方面还公开一种在根据本发明的用于手持式工具机的附件中的匣保持器中使用的匣,该匣包括至少两个在推入方向上相叠地布置的、用于分别接收一个连接器件的夹钳对,其中,该夹钳对弹簧弹性地抵着对应的连接器件预紧并且保持连接器件在垂直于推入方向的方向上定向。
[0037]
在一个优选的实施方式中,用于手持式工具机的附件扩展了手持式工具机的用于连续或者准连续的旋拧过程的工作方式。
[0038]
本发明的其它特征、应用可能性和优点从以下对本发明的实施例的描述中得出,该实施例在附图中示出。在此应注意,在附图中描述或示出的特征本身或以任意组合的方式是本发明的主题,而与其在权利要求中的总结或其引用关系无关以及与其在说明书中或在附图中的表述或者表达无关,并且不应视为以任何形式限制本发明。
附图说明
[0039]
下面根据优选的实施例对本发明进行详细阐述。附图是示意性的并且示出:
[0040]
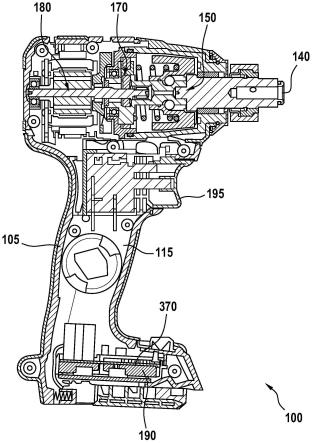
图1电动手持式工具机的示意图;
[0041]
图2根据本发明的附件的一个实施方式的视图,其具有附接的手持式工具机;
[0042]
图3根据本发明的附件的一个实施方式的分解图;
[0043]
图4在根据本发明的附件的一个实施方式中的运动机构的工作方式的不同视图;
[0044]
图5图4的运动机构的工作方式的其它视图;
[0045]
图6具有根据本发明的匣的一个实施方式的根据本发明的附件的一个实施方式的视图;
[0046]
图7根据本发明的匣的一个实施方式的视图;和
[0047]
图8图7的匣的其它细节视图。
具体实施方式
[0048]
图1示出根据本发明的手持式工具机100,其具有带有把手115的壳体105。根据所示的实施方式,手持式工具机100为了不依赖电网地供电而能够与蓄电池组190机械连接和电连接。在图1中,手持式工具机100示例性地构造为蓄电池旋转冲击起子机。然而应指出,本发明不限于蓄电池旋转冲击起子机,而是原则上可以在需要识别工作进程的手持式工具机100,例如冲击钻机中应用本发明。
[0049]
在壳体105中布置有由蓄电池组190供电的电动机180和传动装置170。电动机180通过传动装置170与输入主轴连接。此外,在壳体105内在蓄电池组190的区域中布置有控制
单元370,该控制单元为了控制和/或调节电动机180以及传动装置170例如借助所调设的马达转速n、所选择的角动量、所期望的传动装置挡位x等对其产生影响。
[0050]
电动机180例如可通过手动开关195操纵,即接通和断开,并且可以是任意的马达类型,例如电子换向马达或直流马达。基本上,电动机180能够以电子方式控制或调节,使得不但能够实现逆向运行而且能够实现在所期望的马达转速n和所期望的角动量方面的预给定。合适的电动机的工作方式和结构由现有技术充分已知,因此在这里为了说明书简洁起见不再进行详细说明。
[0051]
通过输入主轴和输出主轴,工具接收部140可旋转地支承在壳体105中。工具接收部140用于接收工具并且可以直接成型到输出主轴上或附件式地与该输出主轴连接。
[0052]
控制单元370与电源连接并且构造为,使得该控制单元能够借助不同的电流信号以电子方式可控制或调节地操控电动机180。不同电流信号引起用于电动机180的不同角动量,其中,电流信号通过控制线路被传导至电动机180。电源例如可以构造为电池或如在所示的实施例中那样构造为蓄电池组190或构造为电网接头。
[0053]
此外,可以设置未详细示出的操作元件,以便调设电动机180的不同运行模式和/或旋转方向。
[0054]
图2示出根据本发明的用于手持式工具机100的附件200。在本实施方式中,手持式工具机100构造为蓄电池驱动的干墙起子机。
[0055]
附件200包括壳体210,该壳体具有第一壳体端部220和第二壳体端部230,该第二壳体端部可以相对于第一壳体端部220在轴向方向x上运动。
[0056]
在本发明的在此所描述的实施方式中,轴向方向x是这样的方向:由手持式工具机100、在图2中即由干墙起子机所产生的转矩沿着该方向作用。在本实施方式中,轴向方向x也可以称为附件200的纵轴线。
[0057]
此外,附件200包括布置在第一壳体端部220上的接口160,用于接收手持式工具机100的被驱动的构件140,例如用于接收手持式工具机100的从动装置或手持式工具机100的工具接收部140。
[0058]
一般而言,接口160设置为用于将手持式工具机100的被驱动构件的沿着轴向方向x作用的旋转传递到工具批头240上。
[0059]
在此,接口可以设置为用于沿着轴向方向x接收布置在手持式工具机100上、例如布置在手持式工具机100的工具接收部140中的长工具批头240并且允许该工具批头伸入到壳体210的内部中。
[0060]
在本发明的实施方式中,接口160设置为用于接收可沿着轴向方向x布置的工具批头240,其中,接口160在该接口160的面向手持式工具机100的工具机侧的一侧164上设置为用于与手持式工具机的被驱动构件140力锁合和/或形状锁合地连接,并且在接口160的附件侧的一侧166上设置为用于接收工具批头240。
[0061]
在图3的分解视图中例如示出这样的情况,其中,工具批头240在接口160的附件侧的一侧166上,即在接口160的背离手持式工具机100的一侧上被接口160的合适的接收部162接收,其中,接收部162例如可以是标准六角接口。
[0062]
在本发明的实施方式中,接收部可以构造为使得固定在手持式工具机上的长工具批头例如从接口160的附件侧的一侧166穿过接收部162插入并且然后在接口的工具机侧的
一侧164上被手持式工具机100、例如被手持式工具机100的工具接收部140接收。
[0063]
在第二壳体端部230上布置有匣保持器260,用于接收具有固定器件的匣400。
[0064]
用于在手持式工具机100的附件200中的匣保持器260中使用的匣400是本发明的另一方面并且在后面结合图6和图7进一步详细描述。
[0065]
匣保持器260通过运动机构500与壳体210这样地耦合,使得第二壳体端部230朝第一壳体端部220方向的相对运动引起匣保持器260从一个工作位置推进到下一个工作位置中,其中,所述推进包括匣保持器260相对于壳体210基本上垂直于轴向方向x的相对运动。
[0066]
图4a-4d以更详细的方式示出运动机构500及其作用方式。为了清楚起见,这些附图仅示出附件200,但本领域技术人员会认识到,在实际运行中,手持式工具机100如上所述布置在第一壳体端部220上或接口160上。
[0067]
图4a示出处于如下状态中的附件200,在该状态下,使用者将附件放置在构件,例如干墙上,在该构件中应安装一个或多个连接器件。
[0068]
为了实施拧紧,使用者在箭头p1的方向上、即沿着轴向方向x施加力,其方式是:使用者将手持式工具机100或附件200以第二壳体端部230压抵构件(未示出)。在施加力之前,第一壳体端部220与第二壳体端部230之间的适当选择的参考距离具有数值d1。
[0069]
通过沿着轴向方向x施加的力的作用,引起第二壳体端部230相对于第一壳体端部220沿着轴向方向x的相对运动,这在图4b中示出。在该状态下,第一壳体端部220与第二壳体端部230之间的参考距离具有数值d2。相对运动的总幅度由d1与d2的差得出并且原则上可以具有任意合适的大小。
[0070]
在此,第二壳体端部230朝第一壳体端部220方向的相对运动有利地克服预紧实现,该预紧在本发明的实施方式中通过弹簧元件、尤其是沿着轴向方向x布置的螺旋弹簧600来调设,该螺旋弹簧布置在壳体210内,如从图3中可看到。在此,螺旋弹簧600以第一端部支撑在接口160上,该接口本身与第一壳体端部力锁合和/或形状锁合地连接。螺旋弹簧600的第二端部与滑架235连接,该滑架构成第二壳体端部230的一部分。
[0071]
除了支撑螺旋弹簧外,在图3所示的本发明的实施例中,滑架235还用于接收匣保持器260。此外,在滑架235上可以布置有用于工具批头240的批头引导件,其中,该批头引导件在第二壳体端部230朝第一壳体端部220的方向相对运动时引导工具批头。
[0072]
第二壳体端部230朝第一壳体端部220方向的相对运动通过沿着轴向方向x取向的引导件250来引导。在该实施例中,引导件250包括布置在第一壳体端部220中的缝隙251以及对应地布置在壳体210中的保险销252,它们例如也在图3中示出。保险销252将第二壳体端部230保险在壳体210上。在此,每个保险销252可以具有第一区段和第二区段,所述第一区段从壳体210出发延伸穿过缝隙251,所述第二区段衔接到第一区段上并且为了将第二壳体端部230保险在壳体210上而具有扩宽部,该扩宽部防止保险销252从对应的缝隙251中拉出或滑出。
[0073]
如上所述,运动机构500使得第二壳体端部230朝第一壳体端部220方向的相对运动引起匣保持器260从一个工作位置推进到下一个工作位置中。在每个工作位置处,通过布置在匣保持器260中的匣在如下位置中提供连接器件,在该位置中,工具批头240可以抓住连接器件的头部并且执行拧紧。
[0074]
图4c示出运动机构500的一个实施方式的一部分。可以看出,运动机构500包括布
置在壳体210上的销505和布置在匣保持器260上的对应的销引导件510。应注意的是,在本发明的实施方式中,运动机构500包括布置在匣保持器260上的销505和布置在壳体210上的对应的销引导件510。
[0075]
尽管在附图中仅示出一个销505和一个销引导件510,但在本发明的实施方式中,另外的销505和销引导件510可以分别布置在壳体210上或匣保持器260上。例如,在图4c和4d中示出的由销505和销引导件510的配置能够以相应的方式附加地存在于附件200的在图4-4c中未示出的、与所示侧相对置的一侧上。销505和销引导件510的这种相对于附件200的纵轴线的对称布置在运动机构500的稳定性方面是有利的。
[0076]
在图4a-4d的实施方式中,销505在壳体210上在侧面布置在紧邻匣保持器260的部位上。
[0077]
销505包括可与销引导件510接合的杆506和相对于杆506扩宽的头部507,因此防止销505从销引导件510中无意地滑出。
[0078]
如由图4d可看到,销引导件510具有两个区段,其中,销引导件510的第一区段512具有平行于轴向方向x的方向分量,而第二区段514具有垂直于轴向方向x的方向分量。
[0079]
销505和销引导件510相对彼此布置成,使得在第二壳体端部230朝第一壳体端部220的方向相对运动期间,如结合图4a和图4b所述的那样,销505首先被引入到第一区段512中。在经过相对运动的确定幅度之后,端面508(如在图4d中可看到的那样可以是倾斜的)接触第二区段514并且推进到该第二区段中。
[0080]
因为第二区段514具有垂直于轴向方向x的方向分量,即相对于轴向方向倾斜,所以第二壳体端部230朝第一壳体端部220方向的相对运动的进一步施加引起,匣保持器260相对于壳体210基本上同样实施在垂直于轴向方向x的方向上的运动。由此使匣保持器260从一个工作位置推进到下一个工作位置中。
[0081]
端面508的上面已经提到的斜切部可以斜坡状或楔形地实施并且有利地具有相对于轴向方向x的斜度,该斜度相应于销引导件的第二区段514的斜度。以这种方式确保在附件200的运行期间匣保持器260在从一个工作位置推进到下一个工作位置中时的柔和的、即无急冲的运动过程。
[0082]
在替代实施方式中,销505的杆506可以实施为柱形。为了调设销505和销引导件510之间的尽可能小的摩擦,还可以选择合适的材料配对。此外可以有利的是,将销505拧紧到壳体210中,以便简化维护工作或修理。替代地,销也可以与壳体材料锁合地连接。
[0083]
在本发明的实施方式中,匣保持器260通过运动机构500的相应引导件相对于壳体210支承,使得完全阻止匣保持器260相对于壳体210沿着轴向方向x的相对运动的运动分量。
[0084]
在附图所示的实施方式中,匣保持器260从下向上推进到下一个工作位置中。在此,布置在匣保持器260上的销引导件510的第二区段514因此相对于轴向方向x向下倾斜。在本发明的替代实施方式中,匣保持器260从上向下推进到下一个工作位置中。在该实施方式中,布置在匣保持器260上的销引导件510的第二区段514向上相对于轴向方向x倾斜。
[0085]
有利地,匣保持器260(或壳体260)具有多个销引导件510,如这在图3和4a中可特别良好地看到的那样。销引导件510垂直于轴向方向x彼此错开地并且与匣保持器260的工作位置对应地间隔开地布置。这样,在从一个工作位置推进到下一个工作位置中时,在插入
和装备匣400的情况下始终为下一次拧紧提供新的连接元件。
[0086]
在本实施例中,如在图3中可看到地,多个销引导件510例如由塑料与匣保持器260整体地成型。在其它实施方式中,销引导件也可作为导轨成型到匣保持器260上或与该匣保持器连接。
[0087]
在本发明的实施方式中,运动机构500包括锁定机构520,这将在下面参考图5a和5b更详细地描述。锁定机构520用于将匣保持器260在其经过相对于壳体210的限定的运动幅度之后固定在工作位置中。
[0088]
如已经描述的那样,运动机构500将第二壳体端部230或滑架235朝第一壳体端部220方向的相对运动转换成匣保持器260垂直于轴向方向x的相对运动,在本发明的实施方式中通过至少一个与壳体210连接的销505和多个配属于各个工作位置的销引导件510来实现,这些销引导件布置在匣保持器260上。
[0089]
在匣保持器垂直于轴向方向x(该轴向方向在图5a中通过箭头p2示出)运动期间,布置在壳体210上并且可绕着旋转中心522枢转的卡锁钩524弹簧弹性地抵着布置在匣保持器侧的齿条526预紧。如在图5a中可看到的那样,卡锁钩524在本发明的实施方式中由两个彼此垂直布置的边构成,其中,第一边在一端部上可枢转地支承在旋转中心522上,并且从第一边垂直伸出的第二边接合到齿条526的波纹型廓中。在图中未示出弹簧元件,该弹簧元件将卡锁钩524弹簧弹性地抵着齿条526预紧。该弹簧元件在最简单的情况下例如可以是简单的螺旋弹簧,该螺旋弹簧绕着旋转中心522将转矩施加到卡锁钩524上。
[0090]
在所示的实施方式中,旋转中心布置在滑架235的下部区域中并且在最简单的情况下可以是布置在滑架中的套筒,用于接收卡锁钩524的销形突起,该销形突起本身构成蘑菇状旋转件522的旋转轴线。
[0091]
在图5a中示出如下状态,在该状态下,卡锁钩524在匣保持器260向上运动期间正好通过一个波峰形状被挤压。箭头p3在图中指示卡锁钩524在此偏转的方向。相比于此,图5b示出卡锁钩卡入下一个波谷形状中的状态。卡锁钩524的所属的旋转运动在此通过箭头p4示出。现在,匣保持器260的位置在图5b所示的状态下相应于当前工作位置,在该工作位置中,工具批头可以将保持在匣400中的连接器件供应给旋拧过程。
[0092]
在匣保持器260通过卡锁钩524固定在工作位置中之后,进一步发生第二壳体端部230沿着轴向方向x朝第一壳体端部220方向的相对运动,然而在此不会进一步出现匣保持器260垂直于轴向方向x的相对运动。这例如可以通过以下方式实现:销引导件510包括第三区段516,该第三区段衔接到第二区段514上并且平行于轴向方向延伸。
[0093]
在第二壳体端部230沿着轴向方向x朝第一壳体端部220的方向继续相对运动时,工具批头240最终可以接触连接器件的头部并且将该连接器件从匣400中压出。关于匣400的作用方式的细节进一步在下面结合图7和图8描述。在第二壳体端部230朝第一壳体端部220的方向进一步相对运动时到达一个点,在该点处,连接器件以尖端超过第二壳体端部230突出并且接触在其上实施拧紧的构件。如果使用者在该时间点操纵手动开关195,则工具批头240旋转并且连接器件与其一起旋转,这引起连接器件的拧紧。
[0094]
在实施拧紧之后,使用者松开对手持式工具机100或附件200的压力,并且螺旋弹簧600又沿着轴线x将第一壳体端部220和第二壳体端部230彼此压开,直至在第一壳体端部220与第二壳体端部230之间的参考距离又如在图4a中所示的那样具有数值d1。
[0095]
在第一壳体端部220和第二壳体端部230沿着轴线x彼此滑开期间,销505可以在销引导件510中沿着第三区段516平行于轴向方向x滑动,并且然后在与下一个工作位置对应的第一区段512’中滑动到其相对的初始位置中。例如在图4d中示出销引导件510的配属于各个工作位置的区段之间的关系。也可以看到,从相应的第一区段512到第二区段514的过渡部通过特殊的楔形壁限定,该楔形壁能够实现销505在该销505相对于销引导件510沿箭头p1’的方向相对运动时从第一区段512被引导到第二区段514中并且进一步被引导到第三区段516中,而销505在该销505相对于销引导件510逆着箭头p1’的方向相对运动时从第三区段516被偏转到第一区段512’中。
[0096]
图6示出附件200连同对应的匣400。该附图示出如何将匣400沿着箭头p5的方向引入到匣保持器400中。箭头p5表示匣400到匣保持器260中的推入方向。可以看到各个连接元件410,它们被储存在匣400中以便在旋拧过程中使用。
[0097]
匣保持器260至少为了接收匣400而沿箭头p5的方向具有匣引导装置。
[0098]
如图7a所示地,每个连接器件410由夹钳对412保持。为此目的,每个夹钳对412具有用于接收连接器件410的接收部415,其中,该接收部在最简单的情况下是夹钳412之间的柱形间隙,该间隙有利地在连接器件410的头部的区域中具有漏斗形区段。匣400包括至少两个沿推入方向相叠地布置的、分别用于接收一个连接器件410的夹钳对412,其中,夹钳对412弹簧弹性地抵着对应的连接器件410预紧并且保持连接器件410在垂直于推入方向的方向上定向。当相应的连接元件410位于工作位置中时,垂直于推入方向的方向通常相应于轴向方向x。
[0099]
匣400具有一排在垂直于推入方向的方向上相叠的引导部414,用于分别接收一个夹钳对412。在附图中给出一个实施方式,在该实施方式中,10个连接器件410被匣400接收。因此,匣400具有10个相叠地布置的引导部414。
[0100]
夹钳对412中的每个夹钳均具有垂直于被接收的相应连接器件410定向的支腿413,该支腿用于在所配属的引导部414中引导相应的夹钳412。匣400具有用于这些支腿413的相应的接收部。此外,支腿413可以用于与布置在分别配属的引导部414中的弹簧元件,例如沿着边413布置的螺旋弹簧共同作用,并且将预紧施加到连接器件410上。如果连接器件410如上所述在附件200运行期间通过工具批头240从匣400中被压出,则连接器件410的头部压抵夹钳对412的接收部415的漏斗形区段并且抵抗该预紧使夹钳412张开。该过程在图8中通过双箭头p6表示。
[0101]
根据本发明,通过接收部415的弹簧弹性预紧,可以在匣400中使用具有不同直径的连接器件410。
[0102]
相应的连接器件410可以手动地和/或自动化地被引入到相应的夹钳对412中。
[0103]
图7c和7d以后视图和侧视图示出具有放入的连接器件414的匣400。
[0104]
当匣400被引入到匣保持器260中时,匣400能够通过匣锁定元件420固定在匣保持器260中。这种匣锁定元件420例如在图5a和5b中示出,其中,匣锁定元件420在这里作为移动元件示出。移动元件420可以在锁定状态和解锁状态之间沿轴向方向x运动,在所述锁定状态下,匣400保持在匣保持器260中,在所述解锁状态下,匣400可以被引入到匣引导装置260中并且可以从匣引导装置中取出。这些附图示出了在锁定位置中的匣锁定元件420。
[0105]
为此目的,匣保持器260具有相应的引导装置,在这些引导装置中,匣锁定元件420
可以在锁定位置与解锁位置之间来回移动。
[0106]
根据本发明,匣400和夹钳对412能够可逆地连接,这除了前述关于连接器件直径的灵活性的优点之外,在各个构件的可更换性和可重复使用性方面提供了一系列其它优点。
[0107]
本发明不限于所描述和所示的实施例。相反,本发明也包括在由权利要求书限定的本发明的范围内的所有专业的改进方案。
[0108]
除所描述的和所示的实施方式外,也可以设想另外的实施方式,所述另外的实施方式可以包括另外的变型以及特征的组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1