一种双向热驱动的柔性爬行机器人及其使用方法
1.本发明涉及柔性爬行机器人的技术领域,特别是涉及一种双向热驱动的柔性爬行机器人及其使用方法。
背景技术:
2.柔性爬行机器人在密闭场合、狭小空间、以及定位监测等方面都有广泛的需求。随着机器人技术的发展,人们对各种柔性机器人的运动性能提出了更高的要求,对机器人的驱动机制、方向性的要求也更为强劲。在这种形势下,具有双向热驱动特性的柔性爬行机器人无疑为机器人的灵活运动机制开辟了新道路。
技术实现要素:
3.有鉴于此,本发明的目的在于提供一种双向热驱动的柔性爬行机器人及其使用方法,本发明通过施加不同强度的红外光照,可以触发柔性爬行机器人不同方向的运动机制,从而实现双向驱动。不同强度的红外光照下,两端的聚二甲基硅氧烷单层膜结构以不同的形态接触水平面,撤除红外光照,双层膜结构进行恢复使得弯曲曲率变小,此时沿x轴正负方向的摩擦力不同,而实现向x轴正方向或负方向的运动。这使柔性爬行机器人具有结构简单、驱动方式易执行、可双向爬行等特点。
4.为了实现上述目的,本发明采用如下技术方案:
5.一种双向热驱动的柔性爬行机器人,所述柔性爬行机器人包括:
6.双层膜结构(2),其包括氧化石墨烯单层膜(2b)以及聚酰亚胺单层膜(2a),其中,所述氧化石墨烯单层膜(2b)设置在一水平面(4)上,所述聚酰亚胺单层膜(2a)设置在所述氧化石墨烯单层膜(2b)的上表面;
7.第一聚二甲基硅氧烷单层膜结构(1),其一端设置在所述双层膜结构(2)的一端,并且该第一聚二甲基硅氧烷单层膜结构(1)与水平面(4)形成的夹角定义为第一夹角;
8.第二聚二甲基硅氧烷单层膜结构(3),其一端设置在所述双层膜结构(2)的另外一端,并且该第二聚二甲基硅氧烷单层膜结构(3)与水平面(4)形成的夹角定义为第二夹角;
9.其中,所述第一聚二甲基硅氧烷单层膜结构(1)的长度大于所述第二聚二甲基硅氧烷单层膜结构(3)的长度,并且所述第一夹角大于所述第二夹角。
10.一种双向热驱动的柔性爬行机器人的使用方法,所述使用方法包括采用第一强度的红外光照对所述柔性爬行机器人进行照射,以实现正向运动,以及采用第二强度的红外光照对所述柔性爬行机器人进行照射,以实现逆向运动,其中,所述第二强度的红外光照强于所述第一强度的红外光照,以所述第二聚二甲基硅氧烷单层膜结构(3)至所述第一聚二甲基硅氧烷单层膜结构(1)的方向为正向方向,其相反方向为逆向方向。
11.进一步的,所述采用第一强度的红外光照对所述柔性爬行机器人进行照射,以实现正向运动,其具体包括:
12.步骤s1、采用所述第一强度的红外光照,对所述柔性爬行机器人进行照射,使得所
述双层膜结构(2)发生弯曲变形;
13.步骤s2、持续照射直到所述第二聚二甲基硅氧烷单层膜结构(3)接触到水平面(4),而所述第一聚二甲基硅氧烷单层膜结构(1)未接触到水平面(4)时,停止照射,此时,所述双层膜结构(2)进行恢复,弯曲曲率变小,该柔性爬行机器人实现沿着正向进行运动;
14.步骤s3、重复该步骤s1-步骤s2,对所述柔性爬行机器人反复施加所述第一强度的红外光照,使得其持续沿着正向进行运动。
15.进一步的,所述采用第二强度的红外光照对所述柔性爬行机器人进行照射,以实现逆向运动,其具体包括:
16.步骤s1、采用所述第二强度的红外光照,对所述柔性爬行机器人进行照射,使得所述双层膜结构(2)发生弯曲变形;
17.步骤s2、持续照射直到所述第一聚二甲基硅氧烷单层膜结构(1)以及所述第二聚二甲基硅氧烷单层膜结构(3)均接触到水平面(4)时,停止照射,此时,所述双层膜结构(2)进行恢复,弯曲曲率变小,该柔性爬行机器人实现沿着逆向进行运动;
18.步骤s3、重复该步骤s1-步骤s2,对所述柔性爬行机器人反复施加所述第二强度的红外光照,使得其持续沿着逆向进行运动。
19.本发明的有益效果是:
20.本发明提供的柔性爬行机器人,其包括的双层膜结构由于红外光照的施加而收缩弯曲,进而产生爬行驱动力,具有结构简单、驱动方式简易的优势。该结构通过双层膜结构两端的第一聚二甲基硅氧烷单层膜结构和第二聚二甲基硅氧烷单层膜结构与水平面构成的夹角不同实现双向驱动,具有可双向爬行的特点。
附图说明
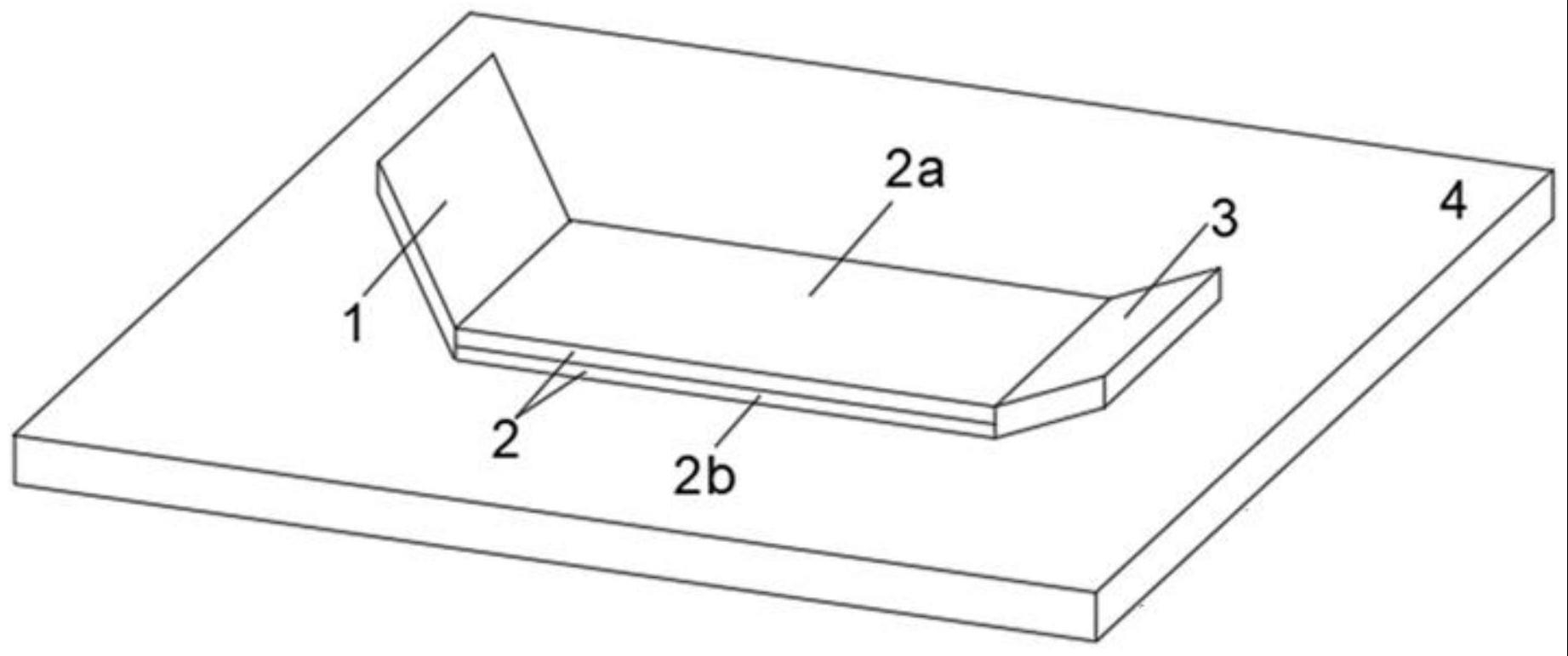
21.图1为实施例1中提供的一种双向热驱动的柔性爬行机器人的结构示意图;
22.图2为实施例2中提供的一种双向热驱动的柔性爬行机器人,其沿x轴正方向运动的示意图;
23.图3为实施例2中提供的一种双向热驱动的柔性爬行机器人,其沿x轴负方向运动的示意图;
24.附图中:
25.1-第一聚二甲基硅氧烷单层膜结构、2-双层膜结构、2b-氧化石墨烯单层膜、2a-聚酰亚胺单层膜、3-第二聚二甲基硅氧烷单层膜结构、4-水平面。
具体实施方式
26.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.实施例1
28.参见图1,本实施例提供一种双向热驱动的柔性爬行机器人,该双向热驱动的柔性爬行机器人包括聚酰亚胺单层膜2a、氧化石墨烯单层膜2b、第一聚二甲基硅氧烷单层膜结
构1、第二聚二甲基硅氧烷单层膜结构3、水平面4。
29.第一聚二甲基硅氧烷单层膜结构1的长度大于第二聚二甲基硅氧烷单层膜结构3的长度。聚酰亚胺单层膜2a与氧化石墨烯单层膜2b上下连接,构成双层膜结构2。
30.双层膜结构2的一端与第一聚二甲基硅氧烷单层膜结构1的一端连接,双层膜结构2的另一端与第二聚二甲基硅氧烷单层膜结构3的一端连接。第一聚二甲基硅氧烷单层膜结构1与水平面4构成第一夹角,第二聚二甲基硅氧烷单层膜结构3与水平面4构成第二夹角,第一夹角大于第二夹角。
31.具体的说,在本实施例中,当采用第一强度的红外光照对柔性爬行机器人进行照射,以实现正向运动,以及采用第二强度的红外光照对所述柔性爬行机器人进行照射,以实现逆向运动,其中,所述第二强度的红外光照强于所述第一强度的红外光照,以所述第二聚二甲基硅氧烷单层膜结构3至所述第一聚二甲基硅氧烷单层膜结构1的方向为正向方向,其相反方向为逆向方向。
32.更具体的说,当红外光照射柔性爬行机器人,使得氧化石墨烯单层膜2b中的水分子解吸附,引起氧化石墨烯单层膜2b的收缩,由于聚酰亚胺单层膜2a具有正的热膨胀系数,因此双层膜结构2向氧化石墨烯单层膜2b侧收缩弯曲。通过控制不同强度的红外光照,可以触发柔性爬行机器人不同方向的运动机制,从而实现双向驱动。
33.实施例2
34.参见图2-图3,本实施例在实施例1的基础之上,提供一种双向热驱动的柔性爬行机器人的使用方法,该使用方法具体包括:
35.施加较弱的红外光照时,双层膜结构2弯曲变形,使得第一聚二甲基硅氧烷单层膜结构1未接触到水平面4,而第二聚二甲基硅氧烷单层膜结构3接触到水平面4时,撤除红外光照,双层膜结构2进行恢复,弯曲曲率变小,此时,因为,第二聚二甲基硅氧烷单层膜结构3与水平面4的接触面积大,相应的,该第二聚二甲基硅氧烷单层膜结构3与水平面4之间摩擦力,要大于第一聚二甲基硅氧烷单层膜结构1与水平面4之间的摩擦力,也相应的,该柔性爬行机器人朝着x轴正方向移动;
36.当红外光照再次施加,双层膜结构2再次收缩弯曲,以此往复,实现柔性爬行机器人向x轴正方向运动。
37.施加较强的红外光照时,双层膜结构2弯曲变形,使得第一聚二甲基硅氧烷单层膜结构1和第二聚二甲基硅氧烷单层膜结构3均接触到水平面4,撤除红外光照,双层膜结构2进行恢复,弯曲曲率变小,此时,因为,第一聚二甲基硅氧烷单层膜结构1与水平面4的接触面积要大于第二聚二甲基硅氧烷单层膜结构3与水平面4的接触面积,相应的,该第一聚二甲基硅氧烷单层膜结构1与水平面4之间的摩擦力,要大于第二聚二甲基硅氧烷单层膜结构3与水平面4之间的摩擦力,也相应的,该柔性爬行机器人朝着x轴负方向移动,当红外光照再次施加,双层膜结构2再次收缩弯曲,以此往复,实现柔性爬行机器人向x轴负方向运动。
38.该双向热驱动的柔性爬行机器人通过控制不同强度的红外光照,可以触发柔性爬行机器人不同方向的运动机制,实现双向驱动,因此运动方向可控、驱动方式简单易行。除此之外,该柔性爬行机器人结构简单、爬行灵活。
39.综上所述,本发明中的一种双向热驱动的柔性爬行机器人不同于其他的爬行机器人,该双向热驱动的柔性爬行机器人具有以下主要特点:一、利用氧化石墨烯和聚酰亚胺两
种热膨胀系数不同的材料制备双层膜结构,具有良好的驱动特性;二、采用双层膜结构两端的聚二甲基硅氧烷单层膜结构与水平面构成的不同夹角实现对柔性爬行机器人的双向驱动;三、采用薄膜工艺制备双层膜结构柔性机器人,制备工艺简单易行。
40.区分是否为该结构的标准如下:
41.1、采用氧化石墨烯和聚酰亚胺这两种热膨胀系数不同的材料制备双层膜结构;
42.2、采用不同长度的两个聚二甲基硅氧烷单层膜结构分别与水平面之间构成不同的夹角连接在双层膜结构的两端实现双向驱动。
43.满足以上两个条件的结构即应视为该结构的柔性爬行机器人。
44.本发明未详述之处,均为本领域技术人员的公知技术。
45.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1