一种基于myRIO疫情测温智能机器人
一种基于myrio疫情测温智能机器人
技术领域
1.本发明涉及一种基于myrio疫情测温智能机器人,属于公共卫生方面的检测技术领域。
背景技术:
2.在疫情常态化背景下,在公共场所及卫生医疗机构多数使用红外热成像技术实现大面积范围内人员的体温检测,但是该检测设备无法移动,只能检测一定范围内人员的体温。在疫情发展期,在集中观察场所的病人,还是需要医务人员进行人工体温测量,这一方面增加了医务人员被感染的危险系数,同时医务人员疲于做一些重复性的操作,也增加了医务人员的工作量;另一方面人工操作不能实时的实现病人体温数据的管理和分析,不利于医务人员对病人的病情做出快速准确的判断。
技术实现要素:
3.本发明的目的在于克服现有技术中的不足,提供一种基于myrio疫情测温智能机器人,测试数据在终端计算机上可以以数值和图形的方式显示病人的体温值及变化情况,当有异常时可以提醒医务人员到指定的位置查看病人的情况,此外,终端计算机还可以选择保存病人的温度数据,便于后期对疫情做一些研究。
4.为达到上述目的,本发明是采用下述技术方案实现的:
5.第一方面,本发明提供了一种基于myrio疫情测温智能机器人,包括:
6.用于机器人自动规避障碍物的自动避障单元、用于机器人自动更随目标进行移动的自动跟随单元、用于机器人按照指定轨迹运行的自动循迹单元、用于检测人体温湿度的温湿度检测单元,实现无需医务人员和病人直接接触而完成病人温湿度病例数据的实时有效的采集、存储和分析。
7.进一步的,所述自动避障单元包括红外传感器、超声波传感器,当红外传感器未检测到障碍物时,机器人按照指定的速度直行,当红外传感器检测到障碍物时,结合超声波传感器测量到的距离,自动调整机器人的旋转角度,机器人进行左转/右转或倒退的运行,直至指定的目的地。
8.进一步的,所述自动循迹单元采用红外传感器检测轨迹线,并通过红外传感器的检测数据控制机器人按照指定的轨迹运行。
9.进一步的,所述温湿度检测单元用于检测人体的温湿度,并形成温湿度变化曲线,对于温度异常人员同时关注其体表湿度值,从而在医学上辅助医师对病人的基本情况做出迅速的判断。
10.进一步的,还包括终端设备,用于接收移动机器人实时测量结果数据的上传、存储及分析处理,对于异常数据及时发出警报,提醒医务人员及时关注。
11.进一步的,还包括安装在机器人上的摄像头,用于将拍摄的照片发送至所述终端设备,终端设备判断断机器人的状态,如发现机器人被突然出现的物体卡住时,可以在服务
器上切换机器人的工作状态到手动,然后通过鼠标点击服务器上的相关人机交互操作按钮,手动将机器人移动到安全区域,再将其切换到自动状态,让其去执行剩下的任务,或者召回机器人进行相关的维护操作。
12.第二方面,一种根据前述任一项所述的基于myrio疫情测温智能机器人的使用方法,包括:
13.完成智能测温机器人的所有参数的初始化设置;
14.完成机器人的行走方式的设置,其中,机器人的工作模式有自动避障、自动跟随及循迹三种模式;
15.完成温湿度的测量。
16.进一步的,所述完成智能测温机器人的所有参数的初始化设置,包括:机器人上主控制器ip地址的设置、红外传感器、超声波传感器、摄像头、温湿度传感器输出信号的地址设置,温湿度异常报警值的设置和温湿度数据存储文件的设置。
17.进一步的,所述自动避障模式是指机器人在指定区域内,根据设定好的位置,结合红外传感器及超声波传感器完成自动避障运行;自动循迹模式是指机器人根据红外传感器识别需要追寻的轨迹,并按照该轨迹运行;自动跟随模式是指机器人根据摄像头获取的信息判断是否是跟随的目标,然后结合红外、超声波传感器完成自动跟随运行。
18.进一步的,还包括:所述机器人采用myrio无线网络进行连接,即myrio 作为一个热点,终端计算机可以连接到此无线ip上,在装有无线网卡的上位机中,可以直接通过无线网络连接功能,与myrio无线网络进行连接。
19.与现有技术相比,本发明所达到的有益效果:
20.本发明提供一种基于myrio疫情测温智能机器人,通过检测模块中的摄像头、红外传感器、超声波传感器,有效的判断机器人的周围环境实现自动循迹或自动避障或自动跟随的运动模式;在移动的过程中,通过温湿度检测模块和服务器管理模块实现对指定场所或环境的相关人员进行定时或不定时温湿度的检测,并对异常数据进行告警,从而提供集中观察场所或医疗场所人员温湿度的自动检测和异常报警等功能,这在一定程度上使用人工智能实现温湿度的自动测量,具有节约人力资源、智能化程度高的特点,也在一定程度上降低了医务人员被感染的几率。
附图说明
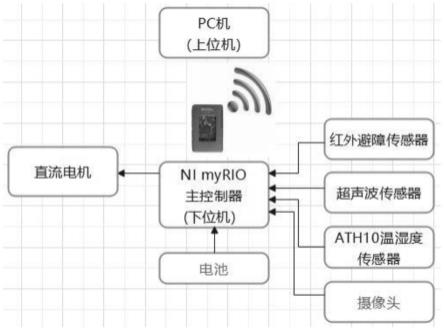
21.图1是本发明实施例提供的一种基于myrio疫情测温智能机器人的结构图;
22.图2是本发明实施例提供的一种基于myrio疫情测温智能机器人的工作流程图;
23.图3是本发明实施例提供的基于labview的ath10温湿度传感器软件设计流程图;
24.图4是本发明实施例提供的应用流程示意图。
具体实施方式
25.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
26.实施例1
27.本实施例介绍一种基于myrio疫情测温智能机器人,如图1所示,包括:
28.本实施例中的机器人主要包括机器人底座、电池、主控制器、电机及红外避障传感器、超声波测距传感器、摄像头、温湿度传感器。
29.机器人底座使用框架结构,电机、电池、主控制器myrio及各种传感器都固定到机器人底座上。红外传感器注意安装位置和角度,便于机器人实现循迹运动;超声波传感器用于测量机器人前方的障碍物距离;摄像头用于拍摄图片,便于机器人确定是否是要跟随的目标;温湿度传感器用于测试病人的体温,必要时也可以用于测试病人皮肤的湿度。主控制器myrio通过获取红外传感器、超声波传感器及摄像头获得的信息,结合终端计算机的指令选择自动避障、自动跟随或者循迹运动,完成指定区域固定或不固定位置人员的体温测试,同时将测试数据无线上传到终端设备,终端设备的操作人员可以实时查看病人的温度值及变化趋势,数据异常时会提醒医务人员及时对病人进行医治,操作人员可以选择性对测试结果数据进行存储,便于后期分析研究。
30.基于myrio的智能测温机器人的工作流程如图2所示:
31.机器人的工作流程主要包括程序初始化模块、工作模式模块、温湿度测量模块和无线传输模块几个部分。
32.初始化模块:该模块完成智能测温机器人的所有参数的初始化设置,具体包括机器人上主控制器ip地址的设置、红外传感器、超声波传感器、摄像头、温湿度传感器输出信号的地址设置,温湿度异常报警值的设置和温湿度数据存储文件的设置等。
33.工作模式模块:该模块完成机器人的行走方式的设置,机器人的工作模式有自动避障、自动跟随及循迹三种模式。自动避障模式是指机器人在指定区域内,根据设定好的位置,结合红外传感器及超声波传感器完成自动避障运行;自动循迹模式是指机器人根据红外传感器识别需要追寻的轨迹,并按照该轨迹运行;自动跟随模式是指机器人根据摄像头获取的信判断是否是跟随的目标,然后结合红外、超声波传感器完成自动跟随运行。此外,智能机器人也能由终端设备结合摄像头获取的信息完成手动控制的运行。
34.温湿度传感器模块:该模块完成温湿度的测量,该模块的工作流程如图3 所示;
35.无线传输模块:该模块可以有两种实现方式,一是myrio工作在无线接入模式下,即myrio作为一个热点,终端计算机可以连接到此无线ip上,在装有无线网卡的上位机中,可以直接通过无线网络连接功能,与myrio无线网络进行连接。另一种方式是通过外置的无线路由器配置实现wifi连接。本专利中使用第一种方案,即myrio作为热点,终端计算机连接到该热点,通过全局变量实现数据实时上传到终端设备上。
36.下面结合一个优选实施例,对上述实施例中设计到的内容进行说明。
37.如图4所示,在疫情常态化背景下,在集中观察场所或一些特殊场所,工作人员根据需要选择合适的模式让机器人自动给指定区域的人员进行测温,并通过无线传输的方式将数据在终端计算机上显示,并根据设定的报警范围,在数据异常时进行报警,提醒工作人员对异常体温的人员及时及时的医治。
38.本发明提供一种基于myrio疫情测温智能机器人,通过检测模块中的摄像头、红外传感器、超声波传感器,有效的判断机器人的周围环境实现自动循迹或自动避障或自动跟随的运动模式;在移动的过程中,通过温湿度检测模块和服务器管理模块实现对指定场所或环境的相关人员进行定时或不定时温湿度的检测,并对异常数据进行告警,从而提供集中观察场所或医疗场所人员温湿度的自动检测和异常报警等功能,这在一定程度上使用人
工智能实现温湿度的自动测量,具有节约人力资源、智能化程度高的特点,也在一定程度上降低了医务人员被感染的几率。
39.实施例2
40.本实施例提供一种根据前述任一项所述的基于myrio疫情测温智能机器人的使用方法,包括:
41.完成智能测温机器人的所有参数的初始化设置;
42.完成机器人的行走方式的设置,其中,机器人的工作模式有自动避障、自动跟随及循迹三种模式;
43.完成温湿度的测量。
44.进一步的,所述完成智能测温机器人的所有参数的初始化设置,包括:机器人上主控制器ip地址的设置、红外传感器、超声波传感器、摄像头、温湿度传感器输出信号的地址设置,温湿度异常报警值的设置和温湿度数据存储文件的设置。
45.进一步的,所述自动避障模式是指机器人在指定区域内,根据设定好的位置,结合红外传感器及超声波传感器完成自动避障运行;自动循迹模式是指机器人根据红外传感器识别需要追寻的轨迹,并按照该轨迹运行;自动跟随模式是指机器人根据摄像头获取的信息判断是否是跟随的目标,然后结合红外、超声波传感器完成自动跟随运行。
46.进一步的,还包括:所述机器人采用myrio无线网络进行连接,即myrio 作为一个热点,终端计算机可以连接到此无线ip上,在装有无线网卡的上位机中,可以直接通过无线网络连接功能,与myrio无线网络进行连接。
47.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1