一种工业机器人的电缆走线结构的制作方法
1.本发明涉及工业机器人技术领域,具体为一种工业机器人的电缆走线结构。
背景技术:
2.随着工业机器人技术的快速发展,工业机器人的应用也迅速扩展至各种行业,作业环境也变得复杂多样,工业机器人的一般有6个转动关节构成,实现机器人末端点的位置及姿态控制,一般前3个关节进行工业机器人的位置控制,后3个关节进行机器人的姿态控制,由于各个关节在机器人末端点位的不同作用,导致机器人某些关节的电缆主要受扭转力作用,某些关节主要受弯曲力作用。
3.由于电缆为多股铜芯线体绞合绕制而成,使得机器人电缆有一定的耐弯曲力和耐受扭转力的能力,但机器人线缆在绞合体外围还覆盖有一层屏蔽层,屏蔽层一般为铜(或铝)线编织网结构,由于铜(或铝)线为塑性材料,具有较高的延展性,随着弯曲和扭转次数的增加,电缆屏蔽层在受力较大的部位逐渐发生断裂(松散),导致电缆屏蔽层散失抗干扰能力;对于机器人的扭转关节,由于结构限制,布线空间狭小,通常的电缆走线的结构设计,仅在两作扭转动作的部件上各设置一固定点,且固定点之间达到一定的距离,主要通过线束自身的抗扭转能力来实现关节扭转,故电缆屏蔽层承受较大的扭转应力,电缆的屏蔽层极易损坏,且此类设计方法的限制条件要求较多,如线束直径、线束固定点之间的距离、扭转的角度范围等。
4.现有的结构设计由于线束自身承受扭转力较大,且电缆的屏蔽层为铜(铝)网编织结构,无法避免电缆屏蔽层(编织铜网)的损坏,从而影响机器人的抗电磁干扰能力的下降(甚至消失)。同时,由于电缆在扭转时,电缆两端的固定点承受较大的约束力,随着扭转次数的增加,在一定条件下,会发生由于电缆接头扭动而导致线路出现接触不良的情况,导致机器人发生线缆接触不良等故障。
5.申请号为cn201810671742.5“一种工业机器人中空线缆保护机构”,包括电机座、中空减速机,所述中空减速机的输出端连接有手腕体、中空轴驱动端连接有驱动带轮,还包括两端分别安装在手腕体的止口内和驱动带轮上的中空过线套、连接在电机座上的t型过线套、穿过中空过线套和t型过线套且通过扎带捆扎在t型过线套上的机器人线缆。该专利保证过线套与减速机同心,避免中空过线套的磨损,还可避免线缆偏置,减少线缆与中空过线套的直接接触,起到二次保护作用,有效的提高线缆使用寿命,使得线缆的可靠性大大提升,从而保证机器人的稳定性,降低了维护成本。
6.但该专利中的保护机构主要通过在线缆外围增加减磨材料(聚甲醛)制作的中空过线套来减少线缆束与中空保护套的磨损,以及t形套使线缆束与中空过线套同心(规避线缆与过线套的接触)来减小线缆磨损。由于机器人关节结构所限,线缆束要通过的孔径较小,机器人关节在扭转动作时,线缆与过线套之间存在相互扭动运动,所以此结构只能在一定程度上减小线缆由于与过线套接触造成的磨损。另外,为达到线缆与中空过线套无接触(或少接触),一般线缆两端的固定点固定较紧,相关的关节位置作扭转运动时,线缆主要通
过自身的绞合绕线结构来承受扭转运动场产生的扭转应力,无法避免线缆屏蔽层铜网的损坏,从而降低了机器人的抗干扰能力,以及线缆两端受扭转力而导致接头松动而产生接触不良的问题。
7.申请号为cn20191128256.0“一种线缆引导结构及具有其的模块化机器人”,线缆引导结构包括穿线部、引导部和安装部。其中穿线部包括穿线孔围壁,穿线孔围壁中形成有穿线孔,穿线孔内可以穿过线缆。所述引导部形成舒长的引导结构对线缆走势形成引导作用。安装部用于将所述线缆引导结构固定于其他部件。该专利的线缆引导结构可在机器臂的狭小空间内固定线缆,避免线缆与其他部件之间发生磨损,还可以避免机器臂在搬运过程中线缆的移动或磨损。但该专利中主要通过增加组件实现对机器人复杂机械臂关节内腔体内的电缆线束的引导、定位及固定,主要目的为避免线束与机械臂腔体产生相对接触而产生磨损。主要为一种布线的方法,且结构较为复杂,布线占用空间大,成本较高,无法解决扭转关节的由于线缆承受扭转应力而导致屏蔽层损坏,以及线缆两端受扭转力而导致接头松动而产生接触不良的问题。
技术实现要素:
8.为了解决上述技术问题,本发明提出了一种工业机器人的电缆走线结构。可有效消除及减轻扭转动作对机器人电缆的受力状态,避免扭转关节处电缆(屏蔽层的)损坏,以及由于线缆扭转而导致的电缆接头发生接触不良的情况。
9.本发明所要解决的技术问题采用以下技术方案来实现:
10.一种工业机器人的电缆走线结构,包括扭转关节固定侧、扭转关节活动侧,还包括:
11.耐磨套,设置在扭转关节活动侧上;
12.过线套,设置在扭转关节固定侧上;
13.螺旋电缆,主体呈螺旋状结构,置于耐磨套内部,螺旋电缆一端穿过扭转关节活动侧、另一端通过过线套的内孔穿过扭转关节固定侧,且通过固定钣金在扭转关节活动侧、过线套的端部处形成固定螺旋电缆两端的固定点一、固定点二。
14.优选地,所述螺旋电缆的中间段为螺旋体,螺旋体的两端与直线段之间设有圆滑过渡特征。
15.优选地,所述螺旋体的圈数在两圈以上。
16.优选地,所述螺旋体的螺距为线径的两倍以上。
17.优选地,所述螺旋体的螺旋直径为线径的五倍以上。
18.优选地,所述螺旋电缆的线缆表面涂有线束润滑脂。
19.优选地,所述耐磨套的两端内孔对应设有圆角特征一、圆角特征二,靠近圆角特征一的法兰上设有通孔一,所述耐磨套通过通孔一及平圆头螺钉固定在扭转关节活动侧上。
20.优选地,所述耐磨套的材质为聚四氟乙烯。
21.优选地,所述过线套呈长筒形,两端内孔对应设有圆角特征三、圆角特征四。
22.优选地,靠近圆角特征四的过线套端部设有与固定钣金配合实现固定螺旋电缆端部的有孔特征,靠近有圆角特征三的过线套端部端面上设有通孔二,所述过线套通过通孔二及内六角螺钉固定在扭转关节固定侧上。
23.本发明的有益效果是:
24.与现有技术相比,本发明通过采用螺旋结构电缆的使用,可有效减小扭转关节作扭转动作时,该部分电缆的受扭转力的情况,可实现扭转关节以更大角度的扭转动作范围;可有效避免工业机器人扭转关节处电缆屏蔽及线缆线芯的损坏;同时避免由于线束受扭转力作用,导致线缆接头处发生接触不良的情况;同时,通过过线套的特殊设计,将电缆固定点设置在扭转关节的同一侧,过线套内电缆与过线套之间无相对运动,有效减小了过线所需的孔径大小;可有效提高机器人扭转关节处线缆的寿命及机器人的抗干扰能力。
附图说明
25.下面结合附图和实施例对本发明进一步说明:
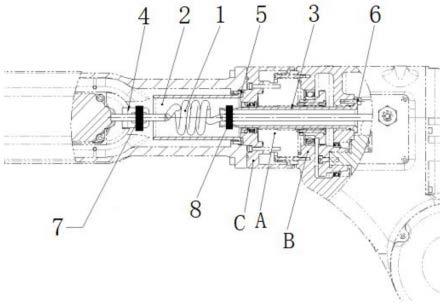
26.图1为本发明的结构示意图;
27.图2为本发明中螺旋电缆的结构示意图;
28.图3为本发明中耐磨套的结构示意图一;
29.图4为本发明中耐磨套的结构示意图二;
30.图5为本发明中过线套的结构示意图一;
31.图6为本发明中过线套的结构示意图二。
32.图中:1、螺旋电缆;11、螺旋体;12、圆滑过渡特征;2、耐磨套;21、圆角特征一;22、通孔一;23、圆角特征二;3、过线套;31、圆角特征三;32、有孔特征;33、圆角特征四;34、通孔二;4、固定钣金;5、平圆头螺钉;6、内六角螺钉;7、固定点一;8、固定点二。
具体实施方式
33.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合附图以及实施例对本发明进一步阐述。
34.如图1所示,一种工业机器人的电缆走线结构,包括螺旋电缆1、耐磨套2、过线套3、固定钣金4、平圆头螺钉5以及内六角螺钉6等组成。图1中的a为扭转关节,b为扭转关节固定侧,c为扭转关节活动侧。
35.如图1和图2所示,所述螺旋电缆1的中间段为螺旋体11,所述螺旋电缆1上的螺旋体11置于耐磨套2内部,所述螺旋体11的圈数要求在两圈以上、螺距为线径的两倍以上、螺旋直径为线径的五倍以上。所述螺旋体11的两端与直线段之间设有圆滑过渡特征12以减小连接部位线缆的应力集中。为了进一步地降低螺旋电缆1的磨损,所述螺旋电缆1的线缆表面涂有线束润滑脂。
36.所述固定钣金4设有两个,对应将螺旋电缆1的两端固定连接在扭转关节活动侧以及过线套3的端部上,并形成了固定点一7和固定点二8,通过固定点的设计,当扭转关节作扭转动作时,线缆主要在螺旋体11处发生扭转,过线套3内的线缆无相对运动,避免了线缆与过线套3产生相对运动而发生线缆磨损,且可以最大程度的减小过线孔径;有效地提高了机器人扭转关节处线缆的寿命及机器人的抗干扰能力。
37.如图3和图4所示,所述耐磨套2的两端内孔对应设有圆角特征一21、圆角特征二23,所述圆角特征一21、圆角特征二23避免了端口部位损伤螺旋电缆1;所述耐磨套2上靠近圆角特征一21的法兰上设有通孔一22,所述通孔一22配合平圆头螺钉5将耐磨套2固定在扭
转关节活动侧上;所述耐磨套2设置在螺旋电缆1的螺旋体11部分外侧,避免了螺旋电缆1作扭转动作时会发生与铸件产生接触;另外,所述耐磨套2的材质为聚四氟乙烯,由于聚录乙烯具有极低的摩擦系数,因此,机器人管线与过线套接触不会产生磨损,提高了机器人线缆的使用寿命。
38.如图5和图6所示,所述过线套3呈长筒形,两端内孔对应设有圆角特征三31、圆角特征四33,通过圆角特征三31、圆角特征四33,避免了过线套3内孔端口损伤螺旋电缆1;所述过线套3上靠近圆角特征四33的过线套3端部上设有有孔特征32,通过有孔特征32与固定钣金4的配合,实现了将螺旋电缆1固定在过线套3的端部上,所述过线套3上靠近圆角特征三31的过线套3端部上设有通孔二34,通过通孔二34与内六角螺钉6配合,将过线套3固定在扭转关节固定侧上。
39.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1