一种迎宾机器人的制作方法
1.本发明涉及机器人技术领域,具体为一种迎宾机器人下部组件结构。
背景技术:
2.随着人工成本增加,礼仪迎宾工作岗位劳动力缺失,此岗位的重复性简单工作可由机器人来替代人来完成。目前市面上礼仪迎宾机器人的行为呆板,只是简单的感应到客户到来然后播放欢迎词,让客户感到一种冰冷的机械气息,客户对企业形象的印象大打折扣。而相关的礼仪迎宾人员对重复性的工作也缺少热心,并且在寒冬及酷暑等气候环境下对迎宾工作无法出色的完成,而且目前多数迎宾机器人基本都是一体化结构,维护不便,且其能实现的功能也相对较少,头部、上身、下身、手臂等活动范围较小。
技术实现要素:
3.本发明的目的在于提供一种迎宾机器人下,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种迎宾机器人,包括头部组件、上身组件与下身组件;所述头部组件包括头部前壳、头部后壳与头部骨架,所述头部前壳与所述头部骨架之间依次设有眼睛镜片与lcd,所述头部后壳与所述头部骨架之间依次设有语音板固定架与语音板,所述头部前壳两侧对称设有左耳结构与右耳机结构;所述上身组件包括上身支架,所述上身支架的前后两端分别设有与之连接的上身前壳与上身后壳,所述上身支架两侧分别设有与之连接的右臂组件与左臂组件,所述上身支架上端依次设有头部支柱、轴承固定座、第一深沟球轴承、颈部转轴与颈部转接板,所述颈部转接板上端设有头部转动连接结构,所述上身前壳远离所述上身支架的另一端依次设有前胸、启动按钮、触摸屏支架与触摸屏,所述上身后壳远离所述上身支架的另一端依次设有急停开关与开关胶盖,所述头部支柱与所述轴承固定座之间设有转头检测指针;所述下身组件包括下部骨架,所述下部骨架两侧分别设有下部前壳与下部后壳,所述下部骨架由上至下依次设有路由器、主控板、安卓板、算法板、imu、电源模块与电源板,所述下部骨架顶部还设有腰环。优选的,所述头部前壳与头部后壳顶部分别设有多个第一咪头座、第二咪头座、第一咪头与第二咪头。
5.优选的,所述左耳结构与右耳机结构分别包括右耳外壳、右耳中壳、第一灯带、右耳内壳、左耳外壳、左耳中壳、第二灯带、左耳内壳。
6.优选的,所述头部转动连接结构包括与所述颈部转接板两端分别连接的左固定板与右固定板,所述左固定板与右固定板之间分别设有法兰轴承与头齿轮下,所述左固定板远离所述法兰轴承的另一端依次设有点头检测指针固定件、点头检测指针、红外对射检测开关与点头检测固定支架,所述右固定板远离所述头齿轮下的另一端依次设有轴套与点头电机。
7.优选的,所述头齿轮下上端设有与之配合的头齿轮上,所述头齿轮上一端依次设有销轴、第二深沟球轴承、第一垫圈,其另一端依次设有第三深沟球轴承与第二垫圈。
8.优选的,所述左固定板与所述右固定板上端还设有与之固定连接的颈环。
9.优选的,所述上身支架下端中部设有转头电机固定板,所述转头电机固定板下端设有与之连接的转头电机,所述转头电机固定板上端两侧分别设有转头传感器支架右与转头传感器支架左,且所述转头传感器支架右与转头传感器支架左之间设有至少两个红外对射检测开关。
10.优选的,所述下部前壳与所述下部骨架之间分别设有第一前壳固定件与第二前壳固定件,所述下部后壳与所述下部骨架之间设有后壳固定板。
11.优选的,所述下部骨架下端设有与之固定连接的底盘,所述下部骨架一侧设有与所述底盘固定连接的锂电池,所述锂电池远离所述下部骨架的另一侧设有激光雷达固定板,其上端设有激光雷达支架与激光雷达,所述底盘两侧分别对称设有与之连接的驱动轮组件,且两个所述驱动轮组件内侧分别对称设有至少四个万向轮。
12.优选的,所述下部后壳远离所述下部骨架的另一侧由上至下依次设有充电红外条、电极固定板、电极、抽屉锁、充电红外电路板与充电红外电路板支架,所述下部前壳远离所述下部骨架的另一侧分别设有打印机盖板、超声波支架与超声波。
13.有益效果本发明所提供的迎宾机器人,用手机或电脑连接迎宾机器人wifi,连接成功后打开地图构建app,用电脑或手机控制机器人行走,机器人通过激光雷达扫描周边环境,进行使用场景地图的构建,地图构建完成后,可通过触摸屏在使用场景中设置充电点\迎宾点\讲解点。当有人到达设置迎宾点\讲解点时,机器人可通过摄像头识别人员到来,并主动向所来人员问候\或讲解介绍相关内容。在问候或讲解内容时,头部可做转头或点头动作,手臂可旋转摆动,迎宾机器人还可通过头顶六麦拾取声音,可与所来人员进行交流,机器人六麦不仅可以拾取声音,还可以根据声源的位置来确定说话人员的位置,从而已达到更好的服务,迎宾机器人lcd眼睛表情可根据与其交流人员的话术来变换眼睛表情,可呈现出喜、怒、哀、乐不同的眼睛表情,迎宾机器人超声波可在行走过程中判断行走路径上的障碍物,从而避免与障碍物发生碰撞,当迎宾机器人电量过低时,迎宾机器人会自动规划路径回到设置好的充电点进行充电。
附图说明
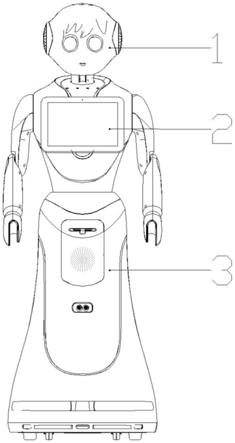
14.图1为本发明的整体结构示意图;图2为本发明的头部爆炸示意图;图3为本发明的身上组件爆炸示意图;图4为本发明的下身组件爆炸示意图。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
实施例
16.如图1-4所示,一种迎宾机器人,包括头部组件1、上身组件2与下身组件3;头部组件1包括头部前壳4、头部后壳5与头部骨架6,头部前壳4与头部骨架6之间依次设有眼睛镜片7与lcd8,头部后壳5与头部骨架6之间依次设有语音板固定架9与语音板10,头部前壳4两侧对称设有左耳结构与右耳机结构;上身组件2包括上身支架11,上身支架11的前后两端分别设有与之连接的上身前壳12与上身后壳13,上身支架11两侧分别设有与之连接的右臂组件14与左臂组件15,上身支架11上端依次设有头部支柱16、轴承固定座17、第一深沟球轴承18、颈部转轴19与颈部转接板20,颈部转接板20上端设有头部转动连接结构,上身前壳12远离上身支架11的另一端依次设有前胸21、启动按钮22、触摸屏支架23与触摸屏24,上身后壳13远离上身支架11的另一端依次设有急停开关25与开关胶盖26,头部支柱16与轴承固定座17之间设有转头检测指针27;下身组件3包括下部骨架28,下部骨架28两侧分别设有下部前壳29与下部后壳30,下部骨架28由上至下依次设有路由器31、主控板32、安卓板33、算法板34、imu35、电源模块36与电源板37,下部骨架28顶部还设有腰环38。优选的,头部前壳4与头部后壳5顶部分别设有多个第一咪头座39、第二咪头座40、第一咪头41与第二咪头42。
17.优选的,左耳结构与右耳机结构分别包括右耳外壳43、右耳中壳44、第一灯带45、右耳内壳46、左耳外壳47、左耳中壳48、第二灯带49、左耳内壳50。
18.优选的,头部转动连接结构包括与颈部转接板20两端分别连接的左固定板51与右固定板52,左固定板51与右固定板52之间分别设有法兰轴承53与头齿轮下54,左固定板51远离法兰轴承53的另一端依次设有点头检测指针固定件55、点头检测指针56、红外对射检测开关57与点头检测固定支架58,右固定板52远离头齿轮下54的另一端依次设有轴套59与点头电机60。
19.优选的,头齿轮下54上端设有与之配合的头齿轮上61,头齿轮上61一端依次设有销轴62、第二深沟球轴承63、第一垫圈64,其另一端依次设有第三深沟球轴承65与第二垫圈66。
20.优选的,左固定板51与右固定板52上端还设有与之固定连接的颈环67。
21.优选的,上身支架11下端中部设有转头电机固定板68,转头电机固定板68下端设有与之连接的转头电机69,转头电机固定板68上端两侧分别设有转头传感器支架右70与转头传感器支架左71,且转头传感器支架右70与转头传感器支架左71之间设有至少两个红外对射检测开关72。
22.优选的,下部前壳29与下部骨架28之间分别设有第一前壳固定件73与第二前壳固定件74,下部后壳30与下部骨架28之间设有后壳固定板75。
23.优选的,下部骨架28下端设有与之固定连接的底盘,下部骨架28一侧设有与底盘固定连接的锂电池76,锂电池76远离下部骨架28的另一侧设有激光雷达固定板77,其上端设有激光雷达支架78与激光雷达79,底盘两侧分别对称设有与之连接的驱动轮组件80,且两个驱动轮组件80内侧分别对称设有至少四个万向轮81。
24.优选的,下部后壳30远离下部骨架28的另一侧由上至下依次设有充电红外条82、电极固定板83、电极84、抽屉锁85、充电红外电路板86与充电红外电路板支架87,下部前壳29远离下部骨架28的另一侧分别设有打印机盖板88、超声波支架89与超声波90。
25.将迎宾机器人开关按钮打开,用手机或电脑连接,迎宾机器人wifi。连接成功后打开地图构建app,用电脑或手机控制机器人行走,机器人通过激光雷达扫描周边环境,进行使用场景地图的构建。地图构建完成后,可通过触摸屏在使用场景中设置充电点\迎宾点\讲解点。当有人到达设置迎宾点\讲解点时,机器人可通过摄像头识别人员到来,并主动向所来人员问候\或讲解介绍相关内容。在问候或讲解内容时,头部可做转头或点头动作,手臂可旋转摆动。迎宾机器人还可通过头顶六麦拾取声音,可与所来人员进行交流。机器人六麦不仅可以拾取声音,还可以根据声源的位置来确定说话人员的位置。从而已达到更好的服务。alice迎宾机器人lcd眼睛表情可根据与其交流人员的话术来变换眼睛表情,可呈现出喜、怒、哀、乐不同的眼睛表情。迎宾机器人超声波可在行走过程中判断行走路径上的障碍物,从而避免与障碍物发生碰撞。当迎宾机器人电量过低时,迎宾机器人会自动规划路径回到设置好的充电点进行充电。
26.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明性的保护范围之内的发明内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1