基于串并混联气动肌肉与气缸的仿生机器人、系统、方法
1.本发明属于机器人技术领域,涉及一种基于串并混联气动肌肉与气缸的仿生机器人、系统、方法。
背景技术:
2.气缸作为气动元件具有较大的直线位移,气动肌肉作为气动元件具有柔顺性好的优点,但是气缸的刚度过大,气动肌肉的运动范围过小,因此有必要开发一款兼顾气动肌肉与气缸优点的机器人。
3.串联机器人具有运动空间大、结构简单、控制简单等优点, 并联机器人具有承载能力强、刚度大、精度高等优点。串联机器人的优点就是并联机器人的缺点,反之亦然。为了很好的发挥两者的优势,有必要开发串并混联的机器人。
技术实现要素:
4.本发明的目的是针对上述现有的技术缺陷,提供了基于串并混联气动肌肉与气缸的仿生机器人,本发明具有刚柔兼顾,承载能力强、运动空间大等优点。
5.为了实现上述目的,本发明采取的技术方案是:一种基于串并混联气动肌肉与气缸的仿生机器人,包括上肢关节系统1、腰关节整体机械装置、下肢关节系统3、控制系统,腰关节整体机械装置顶部的两侧对称转动连接有上肢关节系统1,腰关节整体机械装置下端与下肢关节系统3转动连接,下肢关节系统3包括两个结构完全相同的左下肢3-1、右下肢3-2,上肢关节系统1、腰关节整体机械装置、下肢关节系统3中所有的气动肌肉与气缸构成气动肌肉与气缸控制装置68,气动肌肉与气缸控制装置68与控制系统67连接。
6.具体地,腰关节整体机械装置包括腰关节上端板4、腰关节系统2、腰关节下端板5,腰关节上端板4顶部的两端分别安装有固定板,固定板与上肢关节系统1可转动连接,腰关节上端板4、腰关节下端板5分别在上下两端与腰关节系统2固定连接;腰关节系统2包括腰关节上层10-1、腰关节中层10-2、腰关节下层10-3,腰关节上层10-1与腰关节中层10-2之间由层间连接部件一11-1连接,腰关节中层10-2与腰关节下层10-3之间由层间连接部件二11-2,腰关节上层10-1、腰关节中层10-2、腰关节下层10-3结构完全相同,腰关节上层10-1由上层中间模块6-1、腰关节气动肌肉一7-1、腰关节气动肌肉二7-2、腰关节气动肌肉三7-3、腰关节气动肌肉四7-4、支路连接模块一8-1、支路连接模块二8-2、支路连接模块三8-3、支路连接模块四8-4组成,层间连接部件一11-1与层间连接部件二11-2结构完全相同,层间连接部件一11-1包括腰关节气缸一9-1、腰关节气缸二9-2、腰关节气缸三9-3、腰关节气缸四9-4;腰关节中层10-2的中间为中层中间模块6-2,腰关节下层10-3的中心为下层中间模块6-3,上层中间模块6-1、下层中间模块6-3分别与腰关节上端板4、腰关节下端板5固定连接;腰关节气动肌肉二7-2、腰关节气动肌肉四7-4、腰关节气动肌肉一7-1、腰关节气
2、下层中间模块6-3、支路连接模块一8-1、支路连接模块二8-2、支路连接模块三8-3、支路连接模块四8-4、大腿骨16、小腿骨19、脚24、大臂外部框架25、小臂外部框架26、连接件一27、连接件二28、锥齿轮一29、锥齿轮二30、连接轴一31、锥齿轮三32、传动轮一34、传动轮二35、传动轮三40、传动轮四41、锥齿轮四42、锥齿轮五43、锥齿轮六44、连接件三49、连接件四50、锥齿轮七51、锥齿轮八52、连接轴二54、腕关节连接板65的材料为铝合金。
10.具体地,气动肌肉与气缸控制装置68包括腰关节气动肌肉一7-1、腰关节气动肌肉二7-2、腰关节气动肌肉三7-3、腰关节气动肌肉四7-4、腰关节气缸一9-1、腰关节气缸二9-2、腰关节气缸三9-3、腰关节气缸四9-4、髋关节气缸一12、大腿气动肌肉一13、髋关节气缸二14、大腿气动肌肉二15、大腿气动肌肉三17、大腿气动肌肉四18、小腿气动肌肉一20、小腿气动肌肉二21、小腿气动肌肉三22、小腿气动肌肉四23、大臂气动肌肉一36、大臂气动肌肉二37、大臂气动肌肉三38、大臂气动肌肉四39、大臂气动肌肉五45、大臂气动肌肉六46、大臂气动肌肉七47、大臂气动肌肉八48、小臂气动肌肉一55、小臂气动肌肉二56、小臂气动肌肉三57、小臂气动肌肉四58、小臂气动肌肉五61、小臂气动肌肉六62、小臂气动肌肉七63、小臂气动肌肉八64。
11.优选地,支路连接模块二8-2与腰关节气动肌肉二7-2、支路连接模块四8-4与腰关节气动肌肉四7-4、支路连接模块一8-1与腰关节气动肌肉一7-1、支路连接模块三8-3与腰关节气动肌肉三7-3、腰关节气缸二9-2与支路连接模块二8-2、腰关节气缸二9-2与腰关节中层10-2、腰关节气缸四9-4与支路连接模块四8-4、腰关节气缸四9-4与腰关节中层10-2、腰关节气缸一9-1与支路连接模块一8-1、腰关节气缸一9-1与腰关节中层10-2、腰关节气缸三9-3与支路连接模块三8-3、腰关节气缸三9-3与腰关节中层10-2之间的可转动连接均为万向节,大腿骨16与腰关节下端板5、大腿骨16与小腿骨19、小腿骨19与脚24、大腿气动肌肉一13 与腰关节下端板5、大腿气动肌肉四18与小腿骨19、大腿气动肌肉二15 与大腿骨16、大腿气动肌肉三17与小腿骨19、小腿气动肌肉一20与小腿骨19、小腿气动肌肉一20与脚24、小腿气动肌肉二21 与小腿骨19、小腿气动肌肉二21与脚24、小腿气动肌肉三22 与小腿骨19、小腿气动肌肉三22与脚24、小腿气动肌肉四23与小腿骨19、小腿气动肌肉四23与脚24之间的可转动连接均为球铰,髋关节气缸一12、髋关节气缸二14与大腿骨16可转动连接为轴孔间隙配合,髋关节气缸一12、髋关节气缸二14与腰关节下端板5可转动连接为杆端关节轴承;连接轴二54、腕关节连接板65在左、右与小臂外部框架26可转动连接,可转动连接为轴承。
12.一种基于串并混联气动肌肉与气缸的仿生机器人系统,包括所述的基于串并混联气动肌肉与气缸的仿生机器人、计算机70、脑电控制信号66、气压与位移信号检测装置69,脑电控制信号66分别与控制系统67的输入端、计算机70的输入端连接,控制系统67的输出端与气动肌肉与气缸装置68的输入端连接,气动肌肉与气缸装置68的输出端与气压与位移信号检测装置69的输入端连接,气压与位移信号检测装置69的输出端与计算机70的输入端连接,计算机70的输出端与控制系统67的输入端连接。
13.一种基于串并混联气动肌肉与气缸的仿生机器人系统的方法,包括如下步骤:步骤一:脑电控制信号66采集控制者的脑电信息并将采集到的脑电信息分别传送给控制系统67、计算机70;步骤二:控制系统67根据接收的脑电信息控制气动肌肉与气缸装置68工作;
步骤二:气压与位移信号检测装置69采集气动肌肉与气缸装置68的气压和位移信号,并将采集到的信号传递给计算机70;步骤四:计算机70将气压与位移信号检测装置69采集的信号与步骤一中脑电控制信号66发出的原始信号进行对比分析,得到动作误差信息并根据误差信息重新发送控制命令给控制系统67,控制系统67重新控制气动肌肉与气缸装置68工作,直至没有误差。
14.具体地,所述的脑电信号 66由可穿戴脑电仪采集。
15.本发明的有益效果是:1.本发明利用采用气动肌肉与气缸共同驱动关节,既保证了关节的柔顺性又兼顾了关节的刚度;2.本发明采用串、并、混联组合,既具有串联机器人的优点,同时又具备并联机器人的优点;3.本发明腰关节、髋关节、膝关节、踝关节、肩关节、肘关节、腕关节分别具有4、2、2、2、1、1、1个自由度,可以形象地模拟人的关节可以实现的各种动作。
附图说明
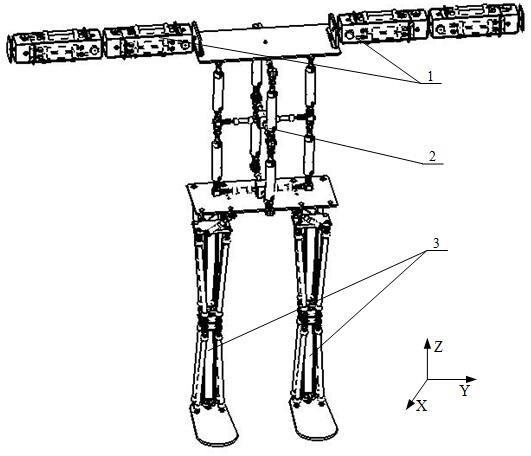
16.图1是基于串并混联气动肌肉与气缸的仿生机器人整体机械结构图;图2是基于串并混联气动肌肉与气缸的仿生机器人腰关节整体机械结构图;图3是基于串并混联气动肌肉与气缸的仿生机器人腰关节机械结构图;图4是基于串并混联气动肌肉与气缸的仿生机器人双下肢机械结构图;图5是基于串并混联气动肌肉与气缸的仿生机器人单下肢机械结构图;图6是基于串并混联气动肌肉与气缸的仿生机器人单上肢总体机械结构图;图7是基于串并混联气动肌肉与气缸的仿生机器人单上肢机械结构图;图8是基于串并混联气动肌肉与气缸的仿生机器人控制方框图。
17.图中:上肢关节系统1、腰关节系统2、下肢关节系统3、左下肢3-1、右下肢3-2、腰关节上端板4、腰关节下端板5、上层中间模块6-1、中层中间模块6-2、下层中间模块6-3、腰关节气动肌肉一7-1、腰关节气动肌肉二7-2、腰关节气动肌肉三7-3、腰关节气动肌肉四7-4、支路连接模块一8-1、支路连接模块二8-2、支路连接模块三8-3、支路连接模块四8-4、腰关节气缸一9-1、腰关节气缸二9-2、腰关节气缸三9-3、腰关节气缸四9-4、腰关节上层10-1、腰关节中层10-2、腰关节下层10-3、层间连接部件一11-1、层间连接部件二11-2、髋关节气缸一12、大腿气动肌肉一13、髋关节气缸二14、大腿气动肌肉二15、大腿骨16、大腿气动肌肉三17、大腿气动肌肉四18、小腿骨19、小腿气动肌肉一20、小腿气动肌肉二21、小腿气动肌肉三22、小腿气动肌肉四23、脚24、大臂外部框架25、小臂外部框架26、连接件一27、连接件二28、锥齿轮一29、锥齿轮二30、连接轴一31、锥齿轮三32、锥齿轮组一33、传动轮一34、传动轮二35、大臂气动肌肉一36、大臂气动肌肉二37、大臂气动肌肉三38、大臂气动肌肉四39、传动轮三40、传动轮四41、锥齿轮四42、锥齿轮五43、锥齿轮六44、大臂气动肌肉五45、大臂气动肌肉六46、大臂气动肌肉七47、大臂气动肌肉八48、连接件三49、连接件四50、锥齿轮七51、锥齿轮八52、锥齿轮组二53、连接轴二54、小臂气动肌肉一55、小臂气动肌肉二56、小臂气动肌肉三57、小臂气动肌肉四58、锥齿轮组三59、锥齿轮组四60、小臂气动肌肉五61、小臂气动肌肉六62、小臂气动肌肉七63、小臂气动肌肉八64、腕关节连接板65、脑电信号66、控制系统
67、气动肌肉与气缸68、气压与位移信号69、计算机70。
具体实施方式
18.下面结合附图和具体实施例,对本发明做进一步的说明。
19.实施例1:如图1、2、3、4、5、6、7、8所示,本发明基于串并混联气动肌肉与气缸的仿生机器人包括:上肢关节系统1、腰关节系统2、下肢关节系统3、左下肢3-1、右下肢3-2、腰关节上端板4、腰关节下端板5、上层中间模块6-1、中层中间模块6-2、下层中间模块6-3、腰关节气动肌肉一7-1、腰关节气动肌肉二7-2、腰关节气动肌肉三7-3、腰关节气动肌肉四7-4、支路连接模块一8-1、支路连接模块二8-2、支路连接模块三8-3、支路连接模块四8-4、腰关节气缸一9-1、腰关节气缸二9-2、腰关节气缸三9-3、腰关节气缸四9-4、腰关节上层10-1、腰关节中层10-2、腰关节下层10-3、层间连接部件一11-1、层间连接部件二11-2、髋关节气缸一12、大腿气动肌肉一13、髋关节气缸二14、大腿气动肌肉二15、大腿骨16、大腿气动肌肉三17、大腿气动肌肉四18、小腿骨19、小腿气动肌肉一20、小腿气动肌肉二21、小腿气动肌肉三22、小腿气动肌肉四23、脚24、大臂外部框架25、小臂外部框架26、连接件一27、连接件二28、锥齿轮一29、锥齿轮二30、连接轴一31、锥齿轮三32、锥齿轮组一33、传动轮一34、传动轮二35、大臂气动肌肉一36、大臂气动肌肉二37、大臂气动肌肉三38、大臂气动肌肉四39、传动轮三40、传动轮四41、锥齿轮四42、锥齿轮五43、锥齿轮六44、大臂气动肌肉五45、大臂气动肌肉六46、大臂气动肌肉七47、大臂气动肌肉八48、连接件三49、连接件四50、锥齿轮七51、锥齿轮八52、锥齿轮组二53、连接轴二54、小臂气动肌肉一55、小臂气动肌肉二56、小臂气动肌肉三57、小臂气动肌肉四58、锥齿轮组三59、锥齿轮组四60、小臂气动肌肉五61、小臂气动肌肉六62、小臂气动肌肉七63、小臂气动肌肉八64、腕关节连接板65、控制系统67、气动肌肉与气缸68。
20.如图1、4所示,本发明基于串并混联气动肌肉与气缸的仿生机器人主要包括上肢关节系统1、腰关节系统2、下肢关节系统3。下肢关节系统3包括两个结构完全相同的左下肢3-1、右下肢3-2。腰关节上端板4顶部的两端分别安装有固定板,固定板与上肢关节系统1可转动连接,如图2、3所示,腰关节整体机械结构包括腰关节上端板4、腰关节系统2、腰关节下端板5,腰关节上端板4、腰关节下端板5分别在上下两端与腰关节系统2固定连接,腰关节系统2中的上层中间模块6-1、下层中间模块6-3分别与腰关节上端板4、腰关节下端板5固定连接。
21.腰关节系统2主要包括腰关节上层10-1、腰关节中层10-2、腰关节下层10-3,腰关节上层10-1与腰关节中层10-2之间由层间连接部件一11-1连接,腰关节中层10-2与腰关节下层10-3之间由层间连接部件二11-2连接。腰关节上层10-1、腰关节中层10-2、腰关节下层10-3结构完全相同,腰关节上层10-1由上层中间模块6-1、腰关节气动肌肉一7-1、腰关节气动肌肉二7-2、腰关节气动肌肉三7-3、腰关节气动肌肉四7-4、支路连接模块一8-1、支路连接模块二8-2、支路连接模块三8-3、支路连接模块四8-4组成。层间连接部件一11-1与层间连接部件二11-2结构完全相同,层间连接部件一11-1包括腰关节气缸一9-1、腰关节气缸二9-2、腰关节气缸三9-3、腰关节气缸四9-4。
22.腰关节气动肌肉二7-2、腰关节气动肌肉四7-4、腰关节气动肌肉一7-1、腰关节气
动肌肉三7-3分别在前、后、左、右与上层中间模块6-1固定连接,支路连接模块二8-2与腰关节气动肌肉二7-2、支路连接模块四8-4与腰关节气动肌肉四7-4、支路连接模块一8-1与腰关节气动肌肉一7-1、支路连接模块三8-3与腰关节气动肌肉三7-3可转动连接。
23.腰关节气缸一9-1两端分别与支路连接模块一8-1、腰关节中层10-2可转动连接,腰关节气缸二9-2两端分别与支路连接模块二8-2、腰关节中层10-2可转动连接,腰关节气缸三9-3两端分别与支路连接模块三8-3、腰关节中层10-2可转动连接,腰关节气缸四9-4两端分别与支路连接模块四8-4、腰关节中层10-2可转动连接。
24.层间连接部件一11-1、层间连接部件二11-2一起驱动腰关节上层10-1、腰关节中层10-2、腰关节下层10-3之间沿z轴移动、绕x轴转动、绕y轴转动。腰关节上层10-1中的腰关节气动肌肉二7-2、腰关节气动肌肉四7-4、腰关节气动肌肉一7-1、腰关节气动肌肉三7-3则带动关节沿着x轴正方向、x轴负方向、y轴正方向、y轴负方向移动。
25.如图4、5所示,大腿骨16两端分别与腰关节下端板5、小腿骨19可转动连接,小腿骨19与脚24可转动连接。髋关节气缸一12、髋关节气缸二14两端分别与腰关节下端板5、大腿骨16可转动连接,髋关节气缸一12、髋关节气缸二14在y轴与z轴形成的平面内平行分布。大腿气动肌肉一13、大腿气动肌肉四18两端分别与腰关节下端板5、小腿骨19可转动连接,大腿气动肌肉二15、大腿气动肌肉三17两端分别与大腿骨16、小腿骨19可转动连接。髋关节气缸一12、髋关节气缸二14与大腿气动肌肉二15、大腿气动肌肉三17串联,然后与大腿气动肌肉一13、大腿气动肌肉四18并联。髋关节气缸一12、髋关节气缸二14一起驱动大腿骨16相对于腰关节下端板5绕x轴转动,大腿气动肌肉二15、大腿气动肌肉三17串联,然后与大腿气动肌肉一13、大腿气动肌肉四18则一起驱动大腿骨16、小腿骨19之间绕x轴、y轴相对转动,同时髋关节气缸一12、髋关节气缸二14、大腿气动肌肉一13、大腿气动肌肉四18一起驱动大腿骨16相对于腰关节下端板5绕x轴、y轴转动。
26.小腿气动肌肉一20、小腿气动肌肉二21、小腿气动肌肉三22、小腿气动肌肉四23两端分别与小腿骨19、脚24可转动连接,小腿气动肌肉一20、小腿气动肌肉二21、小腿气动肌肉三22、小腿气动肌肉四23并联。小腿气动肌肉一20、小腿气动肌肉二21、小腿气动肌肉三22、小腿气动肌肉四23一起驱动小腿骨19、脚24之间绕x轴、y轴相对转动。
27.如图6、7所示,连接件三49、连接件二28、连接件一27、连接件四50在前、后、上、下分别与大臂外部框架25固定连接,传动轮一34、传动轮四41、传动轮三40、传动轮二35在前、后、上、下分别与大臂外部框架25可转动连接,连接轴一31、连接轴二54在左、右与大臂外部框架25可转动连接。锥齿轮一29与大臂外部框架25可转动连接,锥齿轮七51与大臂外部框架25可转动连接。连接轴二54、腕关节连接板65在左、右与小臂外部框架26可转动连接。
28.锥齿轮组一33包括锥齿轮一29、锥齿轮二30、锥齿轮三32、锥齿轮六44,且传动轮一34与锥齿轮三32固定连接,锥齿轮六44与传动轮二35固定连接。锥齿轮二30与锥齿轮一29、锥齿轮三32、锥齿轮六44啮合,锥齿轮三32与锥齿轮二30、锥齿轮六44啮合,锥齿轮一29与锥齿轮二30、锥齿轮六44啮合。锥齿轮组二53包括锥齿轮四42、锥齿轮五43、锥齿轮七51、锥齿轮八52,且传动轮三40与锥齿轮四42固定连接,传动轮四41与锥齿轮八52固定连接。锥齿轮五43与锥齿轮四42、锥齿轮七51、锥齿轮八52啮合,锥齿轮四42与锥齿轮五43、锥齿轮八52啮合,锥齿轮七51与锥齿轮五43、锥齿轮八52啮合。
29.大臂气动肌肉一36、大臂气动肌肉二37一端与连接件一27固定连接,另一端通过
绳索与传动轮三40啮合;大臂气动肌肉三38、大臂气动肌肉四39一端与连接件二28固定连接,另一端通过绳索与传动轮四41啮合;大臂气动肌肉五45、大臂气动肌肉六46一端与连接件三49固定连接,另一端通过绳索与传动轮一34啮合;大臂气动肌肉七47、大臂气动肌肉八48一端与连接件四50固定连接,另一端通过绳索与传动轮二35啮合。
30.大臂气动肌肉一36与大臂气动肌肉二37、大臂气动肌肉三38与大臂气动肌肉四39、大臂气动肌肉五45与大臂气动肌肉六46、大臂气动肌肉七47与大臂气动肌肉八48分别为一组拮抗肌。小臂气动肌肉一55与小臂气动肌肉二56、小臂气动肌肉三57与小臂气动肌肉四58、小臂气动肌肉五61与小臂气动肌肉六62、小臂气动肌肉七63与小臂气动肌肉八64分别为一组拮抗肌。
31.锥齿轮组一33与锥齿轮组四60、锥齿轮组二53与锥齿轮组三59结构、安装模式完全相同。
32.大臂气动肌肉一36与大臂气动肌肉二37通过传动轮三40、锥齿轮四42驱动锥齿轮五43相对于大臂外部框架25绕y轴转动。大臂气动肌肉三38与大臂气动肌肉四39通过传动轮四41、锥齿轮八52驱动锥齿轮五43相对于大臂外部框架25绕y轴转动。锥齿轮七51为备用,可以选择安装气动马达或者拮抗肌形式的气动肌肉。小臂气动肌肉一55与小臂气动肌肉二56、小臂气动肌肉三57与小臂气动肌肉四58通过锥齿轮组三59驱动腕关节连接板65相对于小臂外部框架26绕y轴转动。
33.大臂气动肌肉五45与大臂气动肌肉六46通过传动轮一34、锥齿轮三32驱动锥齿轮二30相对于大臂外部框架25绕y轴转动。大臂气动肌肉七47、大臂气动肌肉八48通过传动轮二35、锥齿轮六44驱动锥齿轮二30相对于大臂外部框架25绕y轴转动。锥齿轮一29为备用,可以选择安装气动马达或者拮抗肌形式的气动肌肉。小臂气动肌肉五61与小臂气动肌肉六62、小臂气动肌肉七63与小臂气动肌肉八64通过锥齿轮组四60驱动连接轴二54相对于小臂外部框架26绕y轴转动。
34.如图8所示,一种基于串并混联气动肌肉与气缸的仿生机器人系统,包括所述的基于串并混联气动肌肉与气缸的仿生机器人、计算机70、脑电控制信号66、气压与位移信号检测装置69,脑电控制信号66分别与控制系统67的输入端、计算机70的输入端连接,控制系统67的输出端与气动肌肉与气缸装置68的输入端连接,气动肌肉与气缸装置68的输出端与气压与位移信号检测装置69的输入端连接,气压与位移信号检测装置69的输出端与计算机70的输入端连接,计算机70的输出端与控制系统67的输入端连接。
35.一种基于串并混联气动肌肉与气缸的仿生机器人系统的方法,包括如下步骤:步骤一:脑电控制信号66采集控制者的脑电信息并将采集到的脑电信息分别传送给控制系统67、计算机70;步骤二:控制系统67根据接收的脑电信息控制气动肌肉与气缸装置68工作;步骤二:气压与位移信号检测装置69采集气动肌肉与气缸装置68的气压和位移信号,并将采集到的信号传递给计算机70;步骤四:计算机70将气压与位移信号检测装置69采集的信号与步骤一中脑电控制信号66发出的原始信号进行对比分析,得到动作误差信息并根据误差信息重新发送控制命令给控制系统67,控制系统67重新控制气动肌肉与气缸装置68工作,直至没有误差。
36.具体地,所述的脑电信号 66由可穿戴脑电仪采集。
37.本发明,通过控制各气动肌肉、气缸,实现仿生机器人位姿的控制,可以动态形象的模拟人的动作,并且可以实现精确的轨迹控制,本发明拥有其他仿生机器人无法比拟的优势。本发明专利以气动肌肉与气缸驱动,具有刚柔兼顾,承载能力强、运动空间大的特点,可用于教学、商业会展展览、工业自动化生产。
38.以上所述的实施例,只是本发明较优选的具体实施方式中的一种,本领域的技术人员在本发明技术方案范围内进行的通常变化和替换都应包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1