一种刚柔混合结构的机械臂系统的制作方法
1.本发明涉及机械臂技术领域,具体涉及一种刚柔混合结构的机械臂系统。
背景技术:
2.机械手臂被广泛应用在对电子产品的检测以及电子产品的生产流水线上,机械手臂的夹取范围和安装高度一经安装完成之后,运行的范围就是固定的,夹取的范围相对局限,想要精准夹取的话,就要多次调整前臂的夹爪压力,而夹爪的压力越来越容易对要夹取的产品表面形成损害。
3.现有的机械手臂在运行中想要精准夹取,则会对产品表面有损毁,例如申请号为201811178771.4公开的机械手臂,在使用中会是对产品表面形成一定程度的损毁。
4.因此,发明一种刚柔混合结构的机械臂系统来解决上述问题很有必要。
技术实现要素:
5.本发明的目的是提供一种刚柔混合结构的机械臂系统,以解决技术中机械臂在精准夹取的同时会对产品表面有损害的问题。
6.为了实现上述目的,本发明提供如下技术方案:一种刚柔混合结构的机械臂系统,包括刚性系统和柔性系统,其特征在于:刚性系统内结构稳定且均为固定位置的相对固定连接,刚性系统相对于整个机械臂的运行起到决定工作范围和对机械臂的支撑,柔性系统内结构位置灵活,结构内零件多为转动和活动连接,零件的作业面在精准控制的范围内,并且柔性系统需要依靠刚性系统的支持,刚性系统包括直线输送带、工作台、和机械手,其特征在于:所述直线输送带上均匀分布有电子产品元件,所述直线输送模块侧面设置有工作台,所述工作台内设置有检测孔,所述检测孔内设置有升降机,所述升降机上连接有升降台面,所述工作台上方对应设置有机械手。
7.优选的,所述刚性系统还包括刚性机械臂模块,所述刚性机械臂模块上设置有固定基座,所述固定基座上设置有显示屏和按钮,所述固定基座上连接有转动轴杆,所述转动轴杆上连接有大臂,所述大臂上设置有移动杆,所述移动杆上连接有固定柱,所述固定柱上连接有一号气缸。
8.优选的,所述一号气缸上连接有柔性机械手臂模块,所述电机设置有四个,四个所述电机分别与四个直杆电性连接。
9.优选的,所述直杆端部通过固定轴安装在固定圆盘上,所述直杆直径与定位槽宽度相吻合。
10.优选的,所述柔性系统还包括柔性机械手臂模块,所述柔性机械手臂模块内设置有固定圆盘,所述固定圆盘上设置有电机,所述电机上连接有直杆,所述直杆上设置有一号圆盘,所述一号圆盘上连接有缓冲垫,所述缓冲垫上设置有二号圆盘,所述固定圆盘底部设置有二号气缸,所述二号气缸上连接有升缩杆,所述升缩杆上连接有定位板,所述定位板上设置有定位槽,所述定位板上安装有挡板,所述挡板上安装有感应器。
11.优选的,所述一号圆盘直径与二号圆盘直径相同,所述二号圆盘内含有磁性涂层。
12.优选的,所述缓冲垫固定连接在一号圆盘和二号圆盘之间,所述缓冲垫直径小于一号圆盘和二号圆盘的直径。
13.优选的,所述定位板为正方形,所述定位板的四边均开设有尺寸与直杆上安装的固定轴直径相吻合的开口。
14.优选的,所述工作台为圆形,所述检测孔设置有四个,四个所述检测孔分别以工作台圆形环形阵列分布。
15.在上述技术方案中,本发明提供的技术效果和优点:
16.1、通过刚性机械臂模块和柔性机械手臂模块来对直线输送带和工作台上的电子产品进行准确夹取,使得对产品表面不损害的同时能精准夹取,降低夹取失败率,降低对产品检测的成本;
17.2、通过对刚性机械手臂模块上的转动轴杆和一号气缸来调整柔性机械手臂的夹取位置和调整柔性机械手臂模块的夹取范围,使得柔性机械手臂模块能精准的在范围内夹取,夹取的准确率提高;
18.3、通过柔性机械手臂模块上的感应器和挡板能对产品的位置感应之后,将定位板移动到产品的正上方,不会触碰产品表面,在将直杆上的二号圆盘吸附在产品表面,最后直杆的向心移动将产品夹取固定,整个过程智能化的同时不会损坏产品的表面。
附图说明
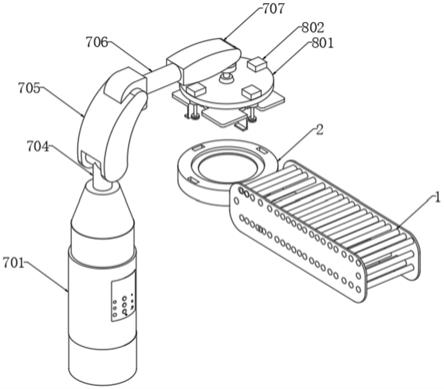
19.图1为本发明的整体结构示意图;
20.图2为本发明大臂的立体结构示意图;
21.图3为本发明一号气缸的立体结构示意图;
22.图4为本发明固定圆盘的立体结构示意图;
23.图5为本发明定位槽的立体结构示意图;
24.图6为本发明一号圆盘的立体结构示意图。
25.附图标记说明:
26.1、直线输送带;2、工作台;3、检测孔;4、升降机;5、升降台面;6、机械手;7、刚性机械臂模块;701、固定基座;702、显示屏;703、按钮;704、转动轴杆;705、大臂;706、移动杆;707、固定柱;708、一号气缸;8、柔性机械手臂模块;801、固定圆盘;802、电机;803、直杆;804、一号圆盘;805、缓冲垫;806、二号圆盘;807、二号气缸;808、升缩杆;809、定位板;810、定位槽;811、挡板;812、感应器。
具体实施方式
27.为了使本领域的技术人员更好地理解本发明的技术方案,下面将结合附图对本发明作进一步的详细介绍。
28.本发明提供了如图1-6所示的一种刚柔混合结构的机械臂系统,包括刚性系统和柔性系统,刚性系统内结构稳定且均为固定位置的相对固定连接,刚性系统相对于整个机械臂的运行起到决定工作范围和对机械臂的支撑,柔性系统内结构位置灵活,结构内零件多为转动和活动连接,零件的作业面在精准控制的范围内,并且柔性系统需要依靠刚性系
统的支持,刚性系统包括直线输送带1、工作台2、和机械手6,直线输送带1上均匀分布有电子产品元件,直线输送模块1侧面设置有工作台2,工作台2内设置有检测孔3,检测孔3内设置有升降机4,升降机4上连接有升降台面5,工作台2上方对应设置有机械手6。
29.刚性机械臂模块7上设置有固定基座701,固定基座701上设置有显示屏702和按钮703,固定基座701上连接有转动轴杆704,转动轴杆704上连接有大臂705,大臂705上设置有移动杆706,移动杆706上连接有固定柱707,固定柱707上连接有一号气缸708。
30.柔性机械手臂模块8内设置有固定圆盘801,固定圆盘801上设置有电机802,电机802上连接有直杆803,直杆803上设置有一号圆盘804,一号圆盘804上连接有缓冲垫805,缓冲垫805上设置有二号圆盘806,固定圆盘801底部设置有二号气缸807,二号气缸807上连接有升缩杆808,升缩杆808上连接有定位板809,定位板809上设置有定位槽810,定位板809上安装有挡板811,挡板811上安装有感应器812
31.工作台2为圆形,检测孔3设置有四个,四个检测孔3分别以工作台2圆形环形阵列分布,一号气缸708上连接有柔性机械手臂模块8,电机802设置有四个,四个电机802分别与四个直杆803电性连接,直杆803端部通过固定轴安装在固定圆盘801上,直杆803直径与定位槽810宽度相吻合,
32.一号圆盘804直径与二号圆盘806直径相同,二号圆盘806内含有磁性涂层,缓冲垫805固定连接在一号圆盘804和二号圆盘806之间,缓冲垫805直径小于一号圆盘804和二号圆盘806的直径,定位板809为正方形,定位板809的四边均开设有尺寸与直杆803上安装的固定轴直径相吻合的开口。
33.本发明工作原理:
34.参照说明书附图1-3,在使用本装置时,首先通过直线输送带1将电子产品元件向着工作台2的方向输送,当然在还没有运行到工作台2上的过程中也能对电子产品元件进行夹取,在输送到工作台2之也能进行夹取,当然是在工作台2上被夹取的操作准确率更好;
35.参照说明书附图3-6,在使用本装置时,因为电子产品的特殊结构,使得对它的夹取和检测过程更严格,要准确的夹取的同时,更不能对产品表面有损坏,所以在机械手6的运行过程中,刚性机械臂模块7的部分是操作柔性机械手臂模块8要在哪个范围内夹取,显示屏702上的按钮703能对柔性机械手臂模块8的夹取范围进行控制,转动轴杆704能带动大臂705的转动,大臂705的转动的同时能通过移动杆706带动固定柱707和一号气缸708移动位置,使得柔性机械手臂模块8的位置移动;
36.柔性机械手臂模块8移动到要夹取的位置时,通过一号气缸708的运行能将固定圆盘801向下移动,带动定位板809移动到工作台2的表面,用感应器812来感应产品的位置,在挡板811的作用下,定位板809不会触碰到产品表面,此时,电机802带动直杆803的移动;
37.直杆803顺着定位槽810的方向移动,使得四个直杆803之间的距离越来越小,将产品夹取吸附在多个二号圆盘806表面,在将产品夹紧在多个直杆803之间,使得夹取产品的准确性提高的同时不会对产品表面损害,整个过程智能化;
38.在夹取完成之后,工作台2会完成一次升降,来确定工作台2上的产品已经被夹取,被夹取失败的产品会通过内的单通道输送到另一条直线输送带1上,这样能降低产品夹取失败造成的损失,也不会让没有经过检测的产品通过生产线;
39.通过刚性系统和柔性系统共同组成完整的机械臂系统,来实现机械臂的运行时的
刚性支撑和柔性转动和夹取,能保证对夹取物品的表面轻柔接触,也能保证夹取的范围精准和夹取的成功率,刚性系统能对柔性系统起到支撑的防护的基本功能实现,柔性系统在刚性系统的支持下,能对易碎物品表面轻柔夹取,刚性系统和柔性系统的结合统一,完成较好的准确和轻柔抓取的动作,提高机械臂的实用性能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1