一种履带式智能巡检机器人的制作方法
1.本发明主要涉及巡检机器人技术领域,具体涉及一种履带式智能巡检机器人。
背景技术:
2.电解铝电厂中电解槽底中高磁场,高温,高粉尘,环境恶劣,柱子密集,空间狭小,电解槽底需要检测的地方较多,人工巡查检测不便。目前市面上有采用巡检机器人来进行巡查,但是目前的巡检机器人使用轮式驱动作为机器人的底盘结构,机型较大,而且导航形式单一等,无法应用于强磁场环境。
技术实现要素:
3.本发明要解决的技术问题就在于:针对现有技术存在的问题,本发明提供一种结构简单紧凑、通行能力强的履带式智能巡检机器人。
4.为解决上述技术问题,本发明提出的技术方案为:
5.一种履带式智能巡检机器人,包括底盘,所述底盘的两侧安装有履带驱动机构;所述底盘的前侧设置有前铲;所述底盘上安装有机身,所述机身的前侧安装有激光导航雷达,所述机身的后侧安装有红外云台相机,所述机身的前侧或/和后侧设置有激光束发射器和循迹高清相机;所述激光束发射器用于发射可见直线激光束,所述循迹高清相机用于根据所述直线激光束进行导航。
6.作为上述技术方案的进一步改进:
7.所述底盘的后侧安装有自动快速充电模块;所述自动快速充电模块包括两块充电块和非金属安装座,两块充电块通过非金属安装座安装在底盘上并垂直布置;所述充电块的面积大于充电桩内充电座的面积以保证充电对接时有较高的位置冗余。
8.所述自动快速充电模块上方的底盘上设有后防撞模块,所述后防撞模块包括刚性的防撞条和支架,所述防撞条通过左右的支架安装在底盘上;所述防撞条表面为软性的橡胶结构,其内部为电子电控,通过橡胶结构的变形将信号传递给机器人以停止运动。
9.还包括位于所述底盘上且紧挨于所述红外云台相机两侧的天线,所述天线采用下沉方式布置在所述底盘上。
10.所述机身由防磁的金属外罩制作而成,所述机身的周侧安装有避障雷达、补光灯、拾音器、扬声器和传感器组件。
11.所述传感器组件包括温湿度传感器、烟雾传感器和气体检测传感器。
12.所述前铲螺纹连接在底盘上,所述底盘上设有多个用于与前铲相连的螺纹孔;多个螺纹孔上下布置在所述底盘上。
13.所述前铲整体呈v型。
14.所述机身的前部设置有补光灯。
15.所述激光导航雷达的顶部设置有保护板。
16.与现有技术相比,本发明的优点在于:
17.1、本发明的履带式智能巡检机器人,采用履带式底盘方式,使得机器人不管是在具有凹凸坡面的路面上行驶,还是在遍地铝渣的电解槽底,均具有较强的通行能力。
18.2、本发明的履带式智能巡检机器人,通过在底盘上设置机身,并将红外云台相机和激光导航雷达布置于机身的前后两侧,从而使得整体结构更加紧凑扁平,从而适用于狭窄多支柱的电解铝电厂的恶劣场景中。
19.3、本发明中的激光导航雷达适用于室内场景中,并能准确识别标记物,进行精确导航和避开障碍物;另外通过激光束发射器与循迹高清相机的配合,实现机器人前后方向的循迹导航;通过上述两种导航方式,能够提高机器人在狭小复杂空间的导航能力;而且上述激光束发射器与循迹高清相机的视觉循迹导航方式,特别适用于狭小空间内多支柱的复杂场景。
附图说明
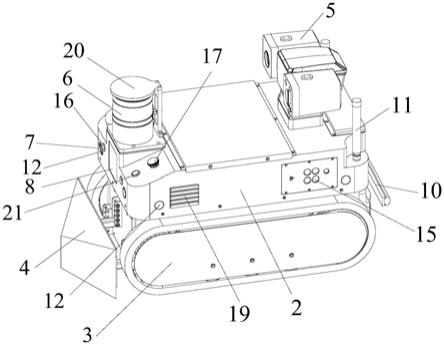
20.图1为本发明的机器人在实施例的结构示意图之一。
21.图2为本发明的机器人在实施例的结构示意图之二。
22.图例说明:1、底盘;2、机身;3、履带驱动机构;4、前铲;5、红外云台相机;6、激光导航雷达;7、激光束发射器;8、循迹高清相机;9、自动快速充电模块;10、后防撞模块;11、天线;12、避障雷达;13、扬声器;14、拾间器;15、传感器组件;16、补光灯;17、急停开关;18、三色灯;19、百叶窗;20、保护板;21、电源开关。
具体实施方式
23.以下结合说明书附图和具体实施例对本发明作进一步描述。
24.如图1和图2所示,本发明实施例的履带式智能巡检机器人,包括底盘1,底盘1的两侧安装有履带驱动机构3;底盘1的前侧设置有前铲4;底盘1上安装有机身2,机身2的前侧安装有激光导航雷达6(如3d激光导航雷达),机身2的后侧安装有红外云台相机5,机身2的前侧和后侧均设置有激光束发射器7和循迹高清相机8;激光束发射器7用于发射可见直线激光束,循迹高清相机8用于根据直线激光束来进行导航。
25.具体地,履带驱动机构3包括履带、电机、减速器、控制电机的驱动器和控制板等电子器件。其中电机与减速机用于给履带提供动力。电机驱动器和控制板均通过螺丝固定在底盘1上。电机通过减速器进行减速和增加扭矩之后输出高扭矩给履带驱动轮。两组履带驱动机构3分别安装在底盘1的两侧,通过同时顺转、同时反转、一正一反转来控制机器人做出前进、后退和转弯的动作;由于使用履带式底盘1方式,使得机器人不管是在具有凹凸坡面的路面上行驶,还是在遍地铝渣的电解槽底,均具有较强的通行能力。
26.通过上述结构的设置,使得本发明的履带式智能巡检机器人具有如下技术效果:
27.本发明的履带式智能巡检机器人,采用履带式底盘1方式,使得机器人不管是在具有凹凸坡面的路面上行驶,还是在遍地铝渣的电解槽底,均具有较强的通行能力;
28.本发明的履带式智能巡检机器人,通过在底盘1上设置机身2,并将红外云台相机5和激光导航雷达6布置于机身2的前后两侧,从而使得整体结构更加紧凑扁平,从而适用于狭窄多支柱的电解铝电厂的恶劣场景中;
29.本发明中的激光导航雷达6采用3d激光slam导航,适用于室内场景中,并能准确识
别标记物,进行精确导航和避开障碍物;另外通过激光束发射器7与循迹高清相机8的配合,实现机器人前后方向的循迹导航。具体是激光束发射器7发射一束人眼可见的绿色激光束,在机器人正前方形成竖直方向的直线激光线,然后由循迹高清相机8视觉识别激光线与两侧的立柱位置距离关系进行更精确的导航;通过上述两种导航方式,能够提高机器人在狭小复杂空间的导航能力,在3d激光salm导航位置丢失的情况下,机器人也能通过视觉导航方式进行纠偏与重新定位巡检;而且上述激光束发射器7与循迹高清相机8的视觉循迹导航方式,特别适用于狭小空间内立柱密集的复杂场景。
30.在一具体实施例中,底盘1的后侧安装有自动快速充电模块9;自动快速充电模块9包括两块高导电的铜质充电块和非金属安装座,两块充电块通过非金属安装座安装在底盘1上并垂直布置;充电块的面积大于充电桩内充电座的面积以保证充电对接时有较高的位置冗余,提高充电的可靠性。自动快速充电模块9位于底盘1尾部,与充电桩接触的充电刷接触面为垂直面,而不易积累灰尘(铝厂现场灰尘较多)。
31.进一步地,自动快速充电模块9上方的底盘1上设有后防撞模块10,后防撞模块10包括刚性的防撞条和支架,防撞条通过左右的支架安装在底盘1上;防撞条表面为软性的橡胶结构,其内部为电子电控,通过橡胶结构的变形将信号传递给机器人以停止运动。其中防撞条为金属刚性材质,具有刚性保护作用;通过防撞条的刚性和橡胶结构的软性两种保护措施来保证机器人在充电对接时不会撞击到充电桩。当然,也能够保证机器人在倒退等工况下撞击到障碍物而不会损坏。
32.在一具体实施例中,还包括位于底盘1上且紧挨于红外云台相机5两侧的天线11,天线11采用下沉方式布置在底盘1上,使得前方的激光导航雷达6具有更大广角的扫描范围,识别物更多更广,标记物匹配度更高,误匹配概率大大降低。
33.在一具体实施例中,机身2由防磁的金属外罩制作而成,机身2的周侧安装有避障雷达12、补光灯16(便于循迹高清相机8清楚拍照)、拾音器14、扬声器13和传感器组件15。其中传感器组件15包括温湿度传感器、烟雾传感器和气体检测传感器。其中机身2为防磁的金属外罩,再配置消磁设备,能够解决强磁场环境下对各机身2内元器件的损坏。上述传感器均布置于机器人机身2的侧面,同样也不易积灰,提高工作可靠性;另外机身2顶部为金属,也没有传感器等电子器件,相应的激光导航雷达6顶部也设置有保护板20,即使掉落高温铝渣,也不会损伤机器人。另外机身2上还设置有三色灯18、电源开关和急停开关17,其中三色灯18的不同颜色可以代表机器人的不同工作状态。
34.在一具体实施例中,前铲4整体呈v型,在机器人前进时能将前方障碍物推至两侧,及时清理路径的铝渣和障碍物,提升机器人运动稳定性,保证导航精度。其中前铲4螺纹连接在底盘1上,底盘1上设有多个用于与前铲4相连的螺纹孔;多个螺纹孔上下布置在底盘1上,能根据障碍物大小情况上下调节多个挡位。
35.本发明的智能巡检机器人主要涉及但不限于用在高强磁场等电厂环境中,并能在崎岖且带有渣土等异物的复杂路面中行驶,同时适用于在狭小空间中巡检、作业等,具有防护能力强,运行灵活,适应广泛等特点。
36.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护
范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1