一种脚手架除冰用的刀口可调节的机械手臂及方法与流程
1.本发明涉及机械手臂技术领域,具体是一种一种脚手架除冰用的刀口可调节的机械手臂及方法。
背景技术:
2.机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影,机械手臂能够接受指令,精确地定位到三维或二维空间上的某一点进行作业。
3.现有技术中,其中申请号为cn201920445461.8的专利,公开了一种脚手架除雪除冰装置,包括机架,所述机架的左侧固定连接有转动件,所述转动件的中部铰接于第三板体的中部,所述第三板体的一侧设有第一杆体,所述第一杆体的一侧通过第一螺栓固定于第三板体的一侧,所述第一杆体的另一侧铰接于第二杆体的一侧,所述第二杆体的另一侧铰接于第三杆体的一侧,所述机壳的底部转动连接有第一滚刷,所述第一滚刷右侧设有固定连接于机壳底部的第二滚刷,通过转动内部带有刀片的第二滚刷,便于对冰块打碎清理,虽然上述专利通过转动第一滚刷,便于完成对积雪的清理,通过移动第一杆体、第二杆体、第三杆体和第四杆体,带动除雪除冰装置在第一板体和第二板体上移动,便于完成对其表面冰块和积雪的清理,但是,机械手臂进行除冰的时候,由于冰面打滑,导致机械手臂带动刀片进行除冰的时候,机械手臂对刀片的的作用力降低,不利于除冰操作,为此,提出了一种一种脚手架除冰用的刀口可调节的机械手臂及方法。
技术实现要素:
4.本发明的目的在于提供一种脚手架除冰用的刀口可调节的机械手臂,另一种目的在于提供一种脚手架除冰用的刀口可调节的机械手臂的调节方法,通过安装盘、连接板以及调节件的设置,以解决上述背景技术中提出的冰面打滑,导致机械手臂带动刀片进行除冰的时候,机械手臂对刀片的的作用力降低,不利于除冰的问题。
5.为实现上述目的,本发明提供如下技术方案:一种脚手架除冰用的刀口可调节的机械手臂,包括底座、第一连接件、第二连接件和第三连接件,第三连接件和第二连接件之间通过转动件转动连接,所述转动件上设置有支撑框,位于所述第三连接件上的支撑框远离第三连接件的一端固定连接有驱动机构,所述驱动机构的输出端固定连接有安装盘,所述驱动机构的两侧均分别卡接有安装框,所述安装框靠近驱动机构的一侧开设有卡接槽,所述卡接槽呈半圆环形设置,两个所述卡接槽形成圆环,所述圆环套设在安装盘上,所述安装框上滑动套接有限位件,所述限位件包括两个限位框,所述限位框内固定连接有隔板,所述隔板与限位框形成第一限位槽,所述限位框通过第二限位槽滑动套接在相对应的安装框上,所述安装盘上转动连接有两个连接板,所述连接板的两端均安装有调节件。
6.作为本发明进一步的方案:位于连接板同一端的两个调节件分别位于安装盘的左右侧,所述隔板和限位框上均分别开设有第三限位槽,所述连接板远离安装盘的一端位于
第一限位槽的内部,位于所述第一限位槽内部的调节件分别位于相对应的第三限位槽内。
7.作为本发明再进一步的方案:所述调节件包括外螺纹管、螺纹套管和限位柱,所述限位柱位于螺纹套管的内部,且限位柱的顶端水平线高于螺纹套管顶端的水平线,所述外螺纹管为中空设置。
8.作为本发明再进一步的方案:所述螺纹套管螺纹套接在外螺纹管的外表面上,所述限位框远离安装框的一端固定连接有夹持块,所述限位件、安装框和夹持块属于夹持机构,所述夹持块靠近限位件的一端固定连接有套框,所述套框通过固定螺栓相对应的限位件固定连接。
9.作为本发明再进一步的方案:所述安装框远离驱动机构的一侧固定连接有插接板,所述插接板远离第三连接件的外表面上开设有凹槽。
10.作为本发明再进一步的方案:所述第一连接件安装在底座上,所述第一连接件与底座转动连接,所述第二连接件安装在第一连接件远离底座的一端,所述第一连接件与底座以及第一连接件与第二连接件之间均分别通过转动件转动连接,所述第三连接件和第二连接件之间通过转动件转动连接。
11.作为本发明再进一步的方案:所述转动件包括轴承、限位环和支撑框,所述限位环转动套接在轴承上,所述支撑框与限位环的外表面固定连接,所述第三连接件远离第二连接件的一端安装有支撑机构,位于第三连接件上的转动件固定连接在支撑机构上。
12.作为本发明再进一步的方案:两个所述夹持块相互靠近一侧的内部均分别固定连接有安装块,两个所述安装块之间安装有除冰件,所述除冰件包括滑块和两个刀块,两个所述刀块分别滑动套接在滑块的两端。
13.一种脚手架除冰用的刀口可调节的机械手臂的调节方法,包括一种脚手架除冰用的刀口可调节的机械手臂,具体包括以下步骤:s1:刀块的调节,驱动机构带动安装盘转动,在安装盘转动的时候,由于连接板通过调节件的转动,对连接板上的限位件进行推动,通过连接板在安装盘上位置的设置,且限位件滑动套接在安装框上,因此,驱动机构带动安装盘转动的时候,除冰件上的刀块向着滑块的两侧滑动,从而实现除冰件上刀块的调节;s2:机械手臂角度的调节,机械手臂进行除冰的时候,机械手臂通过转动件的转动,控制第二连接件相对于第一连接件转动,控制第三连接件相对于第二连接件的转动,在转动件实现机械手臂灵活转动的时候,转动件上的限位环相对于轴承转动,从而对机械手臂除冰的方向进行调节;s3:适用于除冰环境的调节,第一连接件相对于底座沿着水平方向移动,第一连接件在转动的过程中,适用于脚手架拐角处除冰操作;s4:安装盘的限位,安装框上设置卡接槽实现安装盘的限位。
14.与现有技术相比,本发明的有益效果是:1.本发明中,通过第一连接件和第二连接件的设置,利用第一连接件和第二连接件实现机械手臂的灵活转动,在第一连接件和第二连接件上均分别设置轴承、限位环和支撑框,将限位环套设在轴承上,利用限位环带动轴承的转动实现机械手臂的转动,设置轴承固定连接在转动件上,限位环转动套设在轴承上,轴承在实现限位环转动的同时,轴承对限位环进行支撑,从而轴承在限位环转动的时候提升机械手臂的稳定性,通过安装盘的设置,
利用驱动机构带动安装盘的转动,实现夹持块位置的调节,在安装盘上设置连接板以及调节件,连接板通过调节件安装在安装盘上,在安装盘转动的时候,连接板对滑动套设在安装框上的夹持块进行推动,从而实现连接板对夹持块位置的调节,利用安装框以及限位件的设置,实现夹持块在调节过程中的稳定性,从而进一步提升夹持块夹持的除冰件在除冰过程中的除冰效率,解决了现有技术中,利用机械手臂除冰时,机械手臂稳定性低下,导致除冰出现侧滑的弊端。
15.2.在安装框上设置卡接槽,卡接槽的设置能够对安装盘进行限位,从而在安装盘转动的时候,降低安装盘所产生的偏心力,便于安装盘转动过程中的平稳性,在安装盘上设置调节件的时候,将调节件分别设置在安装盘的两侧,安装盘两侧设置的调节件实现安装盘与连接板之间的双重限位操作,将调节件设置成外螺纹管和螺纹套管的形式,将螺纹套管螺纹套接在外螺纹管上,利用外螺纹杆与螺纹套管对调节件进行调节,将限位件套设在安装框上,远离安装盘一端的连接板通过调节件与限位件转动连接,连接板前后端设置的调节件实现连接板的限位操作,从而限位件在调节件转动的过程中实现调节件的双重限位操作,在设置调节件的时候,在螺纹套管的内部设置限位柱,限位柱的设置能够在螺纹套管的初步安装,便于外螺纹管上螺纹套管的拧动,解决了现有技术中,螺纹套管与外螺纹管安装的过程中,螺纹套管初步与外螺纹管接触的时候,螺纹套管容易从外螺纹管上滑落下来。导致螺纹套管与外螺纹管之间安装效率低下的问题。
附图说明
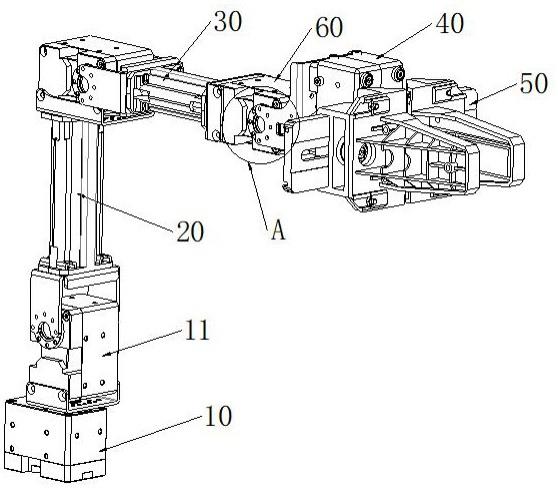
16.图1为一种脚手架除冰用的刀口可调节的机械手臂的立体结构示意图。
17.图2为图1中a处的放大图。
18.图3为图1的爆炸结构示意图。
19.图4为图3中安装框的结构示意图。
20.图5为图3中夹持块的结构示意图。
21.图6为图3中限位件的立体结构示意图。
22.图7为图6中限位框的立体结构示意图。
23.图8为连接板与安装盘安装时的结构示意图。
24.图9为图6中连接板与调节件安装时的立体结构示意图。
25.图10为调节件安装在连接板上的位置结构示意图。
26.图11为图10中b处的放大图。
27.图12为图11中螺纹套管的内部结构示意图。
28.图13为两个夹持块之间安装除冰件时的位置结构示意图。
29.图14为图13中除冰件的结构示意图。
30.图中:10、底座;11、第一连接件;20、第二连接件;30、第三连接件;40、驱动机构;50、夹持机构;51、限位件;511、限位框;5111、隔板;512、连接板;513、第一限位槽;514、第二限位槽;5141、第三限位槽;515、调节件;5151、外螺纹管;5152、螺纹套管;5153、限位柱;516、安装盘;52、安装框;521、插接板;522、凹槽;523、卡接槽;53、夹持块;531、套框;532、安装块;60、支撑机构;61、转动件;611、轴承;612、限位环;62、支撑框;70、除冰件;71、刀块;72、滑块。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.另外,本发明中的元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
33.请参阅图1-图14,本发明实施例中,一种一种脚手架除冰用的刀口可调节的机械手臂及方法,其中机械手臂包括底座10、第一连接件11、第二连接件20和第三连接件30,通过第一连接件11和第二连接件20的设置,利用第一连接件11和第二连接件20实现机械手臂的灵活转动,所述第一连接件11安装在底座10上,所述第一连接件11与底座10转动连接,所述第二连接件20安装在第一连接件11远离底座10的一端,所述第一连接件11与底座10以及第一连接件11与第二连接件20之间均分别通过转动件61转动连接,所述第三连接件30和第二连接件20之间通过转动件61转动连接,所述转动件61包括轴承611、限位环612和支撑框62,所述限位环612转动套接在轴承611上,所述支撑框62与限位环612的外表面固定连接,在第一连接件11和第二连接件20上均分别设置轴承611、限位环612和支撑框62,将限位环612套设在轴承611上,利用限位环612带动轴承611的转动实现机械手臂的转动,设置轴承611固定连接在转动件61上,限位环612转动套设在轴承611上,轴承611在实现限位环612转动的同时,轴承611对限位环612进行支撑,从而轴承611在限位环612转动的时候提升机械手臂的稳定性,所述第三连接件30远离第二连接件20的一端安装有支撑机构60,位于第三连接件30上的转动件61固定连接在支撑机构60上,位于所述第三连接件30上的支撑框62远离第三连接件30的一端固定连接有驱动机构40。
34.所述驱动机构40的输出端固定连接有安装盘516,所述驱动机构40的两侧均分别卡接有安装框52,所述安装框52靠近驱动机构40的一侧开设有卡接槽523,所述卡接槽523呈半圆环形设置,两个所述卡接槽523形成圆环,在安装框52上设置卡接槽523,卡接槽523的设置能够对安装盘进516行限位,从而在安装盘516转动的时候,降低安装盘516所产生的偏心力,便于安装盘516转动过程中的平稳性,所述圆环套设在安装盘516上,所述安装框52远离驱动机构40的一侧固定连接有插接板521,所述插接板521远离第三连接件30的外表面上开设有凹槽522,所述安装框52上滑动套接有限位件51,所述限位件51包括两个限位框511,所述限位框511内固定连接有隔板5111,所述隔板5111与限位框511形成第一限位槽513,所述限位框511通过第二限位槽514滑动套接在相对应的安装框52上,需要说明的是,在限位框511滑动的过程中,位于插接板521上的凹槽522对限位框511进行限位。
35.所述安装盘516上转动连接有两个连接板512,所述连接板512的两端均安装有调节件515,位于连接板512同一端的两个调节件515分别位于安装盘516的左右侧,所述隔板5111和限位框511上均分别开设有第三限位槽5141,所述连接板512远离安装盘516的一端位于第一限位槽513的内部,位于所述第一限位槽513内部的调节件515分别位于相对应的第三限位槽5141内,所述调节件515包括外螺纹管5151、螺纹套管5152和限位柱5153,所述
限位柱5153位于螺纹套管5152的内部,且限位柱5153的顶端水平线高于螺纹套管5152顶端的水平线,所述外螺纹管5151为中空设置,在安装盘516上设置调节件515的时候,将调节件515分别设置在安装盘516的两侧,安装盘516两侧设置的调节件515实现安装盘516与连接板512之间的双重限位操作,将调节件515设置成外螺纹管5151和螺纹套管5152的形式,将螺纹套管5152螺纹套接在外螺纹管5151上,利用外螺纹管5151与螺纹套管5152对调节件515进行调节,将限位件51套设在安装框52上,远离安装盘516一端的连接板512通过调节件515与限位件51转动连接,连接板512前后端设置的调节件515实现连接板512的限位操作,从而限位件51在调节件515转动的过程中实现调节件515的双重限位操作,在设置调节件515的时候,在螺纹套管5152的内部设置限位柱5153,限位柱5153的设置能够在螺纹套管5152的初步安装,便于外螺纹管5151上螺纹套管5152的拧动,解决了现有技术中,螺纹套管5152与外螺纹管5151安装的过程中,螺纹套管5152初步与外螺纹管5151接触的时候,螺纹套管5152容易从外螺纹管5151上滑落下来。导致螺纹套管5152与外螺纹管5151之间安装效率低下的问题。
36.通过安装盘516的设置,利用驱动机构40带动安装盘516的转动,实现夹持块53位置的调节,在安装盘516上设置连接板512以及调节件515,连接板512通过调节件515安装在安装盘516上,在安装盘516转动的时候,连接板512对滑动套设在安装框52上的夹持块53进行推动,从而实现连接板512对夹持块53位置的调节,利用安装框52以及限位件51的设置,实现夹持块53在调节过程中的稳定性,从而进一步提升夹持块53夹持的除冰件70在除冰过程中的除冰效率,解决了现有技术中,利用机械手臂除冰时,机械手臂稳定性低下,导致除冰出现侧滑的弊端。
37.所述螺纹套管5152螺纹套接在外螺纹管5151的外表面上,所述限位框511远离安装框52的一端固定连接有夹持块53,所述限位件51、安装框52和夹持块53属于夹持机构50,所述夹持块53靠近限位件51的一端固定连接有套框531,所述套框531通过固定螺栓相对应的限位件51固定连接,两个所述夹持块53相互靠近一侧的内部均分别固定连接有安装块532,两个所述安装块532之间安装有除冰件70,所述除冰件70包括滑块72和两个刀块71,两个所述刀块71分别滑动套接在滑块72的两端。
38.一种调节方法,包括一种脚手架除冰用的刀口可调节的机械手臂,具体包括以下步骤:s1:刀块71的调节,驱动机构40带动安装盘516转动,在安装盘516转动的时候,由于连接板512通过调节件515的转动,对连接板512上的限位件51进行推动,通过连接板512在安装盘516上位置的设置,且限位件51滑动套接在安装框52上,因此,驱动机构40带动安装盘516转动的时候,除冰件70上的刀块71向着滑块72的两侧滑动,从而实现除冰件70上刀块71的调节;s2:机械手臂角度的调节,机械手臂进行除冰的时候,机械手臂通过转动件61的转动,控制第二连接件20相对于第一连接件11转动,控制第三连接件30相对于第二连接件20的转动,在转动件61实现机械手臂灵活转动的时候,转动件61上的限位环612相对于轴承611转动,从而对机械手臂除冰的方向进行调节;s3:适用于除冰环境的调节,第一连接件11相对于底座10沿着水平方向移动,第一连接件11在转动的过程中,适用于脚手架拐角处除冰操作;
s4:安装盘516的限位,安装框52上设置卡接槽523实现安装盘516的限位。
39.本发明的工作原理是:首先,将除冰件70安装在两个安装框52之间,在利用机械手臂进行除冰的时候,机械手臂通过转动件61的转动,控制第二连接件20相对于第一连接件11转动,控制第三连接件30相对于第二连接件20的转动,在转动件61实现机械手臂灵活转动的时候,转动件61上的限位环612相对于轴承611转动,从而对机械手臂除冰的方向进行调节,对于除冰的面积以及除冰环境的不同,对除冰件70进行调节,由于除冰件70包括滑块72和两个刀块71,且两个刀块71滑动套接在滑块72上,因此,刀块71在滑块72上的相对滑动能够实现除冰件70直径的调节,从而便于除冰件70对脚手架的拐角处进行除冰操作。
40.在除冰件70刀口直径调节的过程中,利用驱动机构40带动安装盘516转动,在安装盘516转动的时候,由于连接板512通过调节件515的转动,对连接板512上的限位件51进行推动,通过连接板512在安装盘516上位置的设置,且限位件51滑动套接在安装框52上,因此,驱动机构40带动安装盘516转动的时候,除冰件70上的刀块71向着滑块72的两侧滑动,从而实现除冰件70上刀块71的调节。
41.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
42.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1