一种用于砌墙机器人的便于调节的机械手的制作方法
1.本发明涉及机械手技术领域,尤其涉及一种用于砌墙机器人的便于调节的机械手。
背景技术:
2.在建筑行业,砌墙工人需要完成搬砖、抹灰和砌砖工序,体力消耗大,在高空作业时,还会增加危险性,并降低砌墙效率,因此近年来国内外陆续有砌墙机器人面世。砌墙机器人通过机械手实现砖块的搬运和砌垒,大大提高了砌砖效率。
3.但是现有的用于砌墙机器人的机械手仍存在一些弊端,传统的砌墙机器人的机械手的手臂长度通常是固定的,在应对一些需要加长手臂长度的环境下,难以使用,还需要更换较长机械臂的机械手进行使用,费时费力,为此我们提出一种便于调节长度的用于砌墙机器人的机械手。
技术实现要素:
4.(一)要解决的技术问题为了解决现有技术中砌墙机器人的机械手不便于调节长度的技术问题,本发明提供一种用于砌墙机器人的便于调节的机械手,其设置有调节组件,使得工作人员能够方便快捷地对第一机械臂端和第二机械臂端的距离进行调节。
5.(二)技术方案为了达到上述目的,本发明采用的主要技术方案包括:一种用于砌墙机器人的便于调节的机械手,包括机械手主体,所述机械手主体固定在底端的底座上,所述底座安装在可移动平台上,所述机械手主体顶端连接有第一机械臂端,所述第一机械臂端远离所述机械手主体的一端与调节组件的一端连接,所述调节组件的另一端与第二机械臂端连接,所述第二机械臂端底端安装有机械爪;所述调节组件包括固定套筒和波纹管;所述波纹管设置在所述固定套筒的两端,且与所述固定套筒固定连接;两个所述波纹管远离所述固定套筒的一端分别与所述第一机械臂端和所述第二机械臂端可拆卸地固定连接。
6.作为本发明的一种优选技术方案,两个所述波纹管远离所述固定套筒的一端均设置有固定法兰盘,两个所述固定法兰盘分别与所述第一机械臂端和所述第二机械臂端可拆卸地固定连接。
7.作为本发明的一种优选技术方案,所述调节组件还包括设置在两个所述固定法兰盘之间的套筒和活动杆;所述活动杆可在所述套筒内滑动,且所述套筒和所述活动杆上设置有限位组件,以限制两者的相对滑动。
8.作为本发明的一种优选技术方案,两个所述固定法兰盘的外壁均设置有固定座;所述套筒和所述活动杆彼此远离的一端均设置有螺纹固定端,两个所述螺纹固定端分别贯穿对应的所述固定座,并通过螺母与对应的所述固定法兰盘固定连接。
9.作为本发明的一种优选技术方案,沿着所述固定套筒的周向均匀设置多组所述套筒和所述活动杆。
10.作为本发明的一种优选技术方案,所述限位组件包括开设在所述套筒侧壁上的螺纹孔、连接在所述螺纹孔内的螺纹杆、固定在所述螺纹杆外端的螺帽和均匀开设在所述活动杆上的多个卡合槽。
11.作为本发明的一种优选技术方案,所述第一机械臂端和所述第二机械臂端靠近所述调节组件的一端均设置有与所述波纹管上的所述固定法兰盘相配合的法兰盘,同组法兰盘通过多组螺栓固定连接。
12.作为本发明的一种优选技术方案,所述第二机械臂端的外壁设置有存放组件。
13.作为本发明的一种优选技术方案,所述存放组件包括开设在第二机械臂端外壁的收纳腔、设置在所述收纳腔内壁的滑槽、与所述滑槽滑动连接的滑块和固定在所述滑块外壁上的放置托盘。
14.作为本发明的一种优选技术方案,所述收纳腔的空间大小设置为可完全容纳放置托盘。
15.(三)有益效果本发明的有益效果是:1、通过在第一机械臂端和第二机械臂端之间设置调节组件,使得工作人员能够方便快捷地对第一机械臂端和第二机械臂端的间距进行调节,可以在任意环境下进行工作,满足实际需求。
16.2、通过设置限位组件,使得在机械手主体的工作过程中第一机械臂端和第二机械臂端的间距保持不变。
17.3、通过设置存放组件,使得调节组件出现问题后,可以及时从第二机械臂端内取出拆卸和维修养护的工具,保证维修及时的同时,进一步提高机械手主体的工作效率。
附图说明
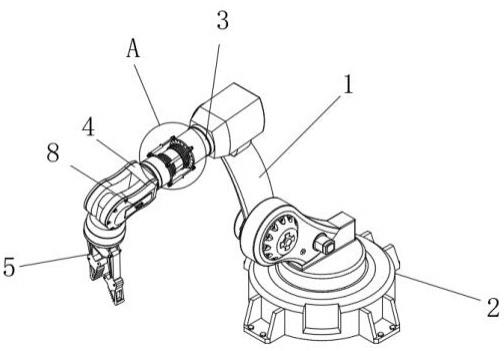
18.图1为本发明的用于砌墙机器人的便于调节的机械手的结构立体示意图;图2为本发明的用于砌墙机器人的便于调节的机械手的结构正视示意图;图3为图1中a处结构放大示意图;图4为图3中b处结构放大示意图;图5为图4中的限位组件的正视剖面示意图;图6为图1中的存放组件的俯视剖面示意图。
19.【附图标记说明】1:机械手主体;2:底座;3:第一机械臂端;4:第二机械臂端;5:机械爪;6:调节组件;61:固定法兰盘;62:固定套筒;63:波纹管;64:固定座;65:螺纹固定端;66:螺母;67:套筒;68:活动杆;7:限位组件;71:螺纹杆;72:螺帽;73:螺纹孔;74:卡合槽;8:存放组件;81:收纳腔;82:滑槽;83:滑块;84:开口;85:放置托盘;86:拉杆。
具体实施方式
20.为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发
明作详细描述。
21.如图1和图2所示,本发明实施例提供一种用于砌墙机器人的便于调节的机械手,包括机械手主体1,机械手主体1固定在底端的底座2上,底座2安装在可移动平台上,以根据现场作业环境灵活设置砌墙机器人的位置。机械手主体1顶端连接有第一机械臂端3,第一机械臂端3远离机械手主体1的一端与调节组件6的一端可拆卸地固定连接,调节组件6的另一端与第二机械臂端4可拆卸地固定连接。第二机械臂端4的底端安装有机械爪5。第二机械臂端4的外壁设置有存放组件8。
22.如图3所示,调节组件6包括固定套筒62和波纹管63。波纹管63设置在固定套筒62的两端,且与固定套筒62固定连接。波纹管63构造为具有多个横向波纹的圆柱形薄壁折皱的弹性连接管。两个波纹管63远离固定套筒62的一端均设置有固定法兰盘61。两个固定法兰盘61分别与第一机械臂端3和第二机械臂端4可拆卸地固定连接。调节组件6还包括设置在两个固定法兰盘61之间的套筒67和活动杆68。套筒67和活动杆68沿着固定套筒62的轴向延伸。活动杆68可在套筒67内滑动,且套筒67和活动杆68上设置有限位组件7,以限制两者的相对滑动。两个固定法兰盘61的外壁均设置有固定座64。套筒67和活动杆68彼此远离的一端均设置有螺纹固定端65,两个螺纹固定端65分别贯穿对应的固定座64,并通过螺母66与固定法兰盘61固定连接。沿着固定套筒62的周向均匀设置多组套筒67和活动杆68,优选地,至少均匀设置四组。
23.优选地,第一机械臂端3和第二机械臂端4靠近调节组件6的一端均设置有与波纹管63上的固定法兰盘61相配合的法兰盘,同组法兰盘通过多组螺栓固定连接,从而将固定套筒62及波纹管63固定在第一机械臂端3和第二机械臂端4之间。然后将套筒67和活动杆68的螺纹固定端65插入对应的固定座64内,然后通过螺母66固定。当需要加长第一机械臂端3和第二机械臂端4的总长度时,只需解除套筒67和活动杆68的限位,活动杆68相对于套筒67伸出到需要的长度后,再通过限位组件7固定套筒67和活动杆68的相对位置。通过沿周向布置的至少四组套筒67和活动杆68,使得工作人员能够方便快捷地对第一机械臂端3和第二机械臂端4的间距进行调节,可以在任意环境下进行工作,满足实际需求。
24.限位组件7包括开设在套筒67侧壁的螺纹孔73、连接在螺纹孔73内的螺纹杆71、固定在螺纹杆71外端的螺帽72和均匀开设在活动杆68上的多个卡合槽74。
25.通过拧动螺帽72带动螺纹杆71在螺纹孔73内转动,直到与活动杆68上对应的卡合槽74卡合固定。卡合槽74的内径设置为等于或稍大于螺纹杆71的外径。当工作人员通过调节组件6对第一机械臂端3和第二机械臂端4的间距进行调节时,拧动螺帽72带动螺纹杆71向外移动以解除对活动杆68的限位。拉动活动杆68在套筒67内伸缩滑动,长度调节完毕后,再次拧动螺帽72带动螺纹杆71向内移动,以与活动杆68上对应的卡合槽74卡合固定。通过限位组件7使得在机械手主体1的工作过程中第一机械臂端3和第二机械臂端4的间距保持不变。限位组件7可仅设置在对称的两组套筒67和活动杆68上,也可以设置在所有的套筒67和活动杆68上,从而增强调节组件6的结构稳定性。
26.存放组件8包括开设在第二机械臂端4外壁的收纳腔81、设置在收纳腔81内壁的滑槽82、与滑槽82滑动连接的滑块83和固定在滑块83外壁上的放置托盘85。收纳腔81具有开口84,放置托盘85通过开口84插入收纳腔81内,形成类似抽屉的结构。放置托盘85的外壁固定设置拉杆86。拉杆86的外壁设有防滑纹路,使得工作人员拉动拉杆86时,不会产生手滑的
现象,保证拉动放置托盘85的平稳性。
27.工作人员可以将安装和维修调节组件6上的螺丝刀等工具放置在放置托盘85内,然后推动拉杆86带动放置托盘85通过滑块83在滑槽82内向内滑动。收纳腔81的空间大小设置为可完全容纳放置托盘85,使得放置托盘85能够完全移动至收纳腔81内形成收纳。放置托盘85外部可通过锁结构进行封锁。通过设置存放组件8,使得调节组件6出现问题后,可以及时从第二机械臂端4内取出拆卸和维修养护的工具,保证维修及时的同时,进一步提高机械手主体1的工作效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1