复合叉状装置、使用该复合叉状装置的方法及系统与流程
1.本发明实施例有关于一种复合叉状装置以及使用该复合叉状装置的方法及系统。
背景技术:
2.半导体集成电路(ic)工业数十年来已经历了极大的进展且仍正在蓬勃发展中。随着技术上的剧烈改进,ic的制造通常是机器驱动的,其提高了工作安全性、生产力及效率。然而,随着ic制程的复杂性增加,从而经常涉及到多种材料及装置,制程效率可能会下降且生产成本可能会激增。因此,业界付出更多的注意力在开发更擅长处理多功能任务的机器。
技术实现要素:
3.依据本揭示内容的一些实施例,提供一种复合叉状装置,包含一第一叉指及一与该第一叉指分隔开的第二叉指,该第一叉指及第二叉指之每一者具有一上部表面及一相对于该上部表面呈凹陷的下部表面,该第一叉指及该第二叉指的该上部表面被构型为协作地支持一第一类型容器,该第一叉指及该第二叉指之该下部表面被构型为协作地支持一第二类型容器,该第二类型容器具有一与该第一类型容器的一构型不同的构型。
4.依据本揭示内容的一些实施例,提供一种系统,包含:一复合载入口工作台,其被构型为允许负载一第一类型容器或一第二类型容器,该第二类型容器具有一与该第一类型容器的一构型不同的构型;一处理工具;一机器人,其定位在该复合载入口工作台及该处理工具之间;及一复合叉状装置,其经耦合而可被该机器人驱动,且被构型为选择性地支持该第一类型容器或该第二类型容器,从而允许该机器人选择性地将该第一类型容器或第二类型容器自该复合载入口工作台运输至该处理工具的一入口载入口,该复合叉状装置包括一第一叉指及一与该第一叉指分隔开的第二叉指,该第一叉指及该第二叉指之每一者具有一上部表面及一相对于该上部表面呈凹陷的下部表面,该第一叉指及该第二叉指之该上部表面被构型为协作地支持该第一类型容器,该第一叉指及该第二叉指之该下部表面被构型为协作地支持该第二类型容器。
5.依据本揭示内容的一些实施例,提供一种方法,包含:将一容器置于一复合载入口工作台上;使用一复合叉状装置支持该容器,该复合叉状装置包括一第一叉指及一第二叉指,该第一叉指及该第二叉指之每一者具有一上部表面及一相对于该上部表面呈凹陷的下部表面,以使得该容器被该第一叉指及该第二叉指的该上部表面或该下部表面支持;使用该复合叉状装置将该容器运输至一处理工具,使得该容器的一底部部分被置于该处理工具的一入口载入口;及使该容器脱离该复合叉状装置。
附图说明
6.当结合附图阅读时可从以下详细描述来最佳地理解本揭示内容之各方面。值得注意的是,遵循业界标准作法,各种特征件并未按照比例绘制。事实上,为了能清楚论述,各特征件的尺寸可能任意放大或缩小。
7.图1a是一例示性透视图,其绘示依据一些实施例的容器。
8.图1b是一包括依据一些实施例的图1a所示的容器的堆叠的容器的例示性透视图。
9.图2是一例示性透视图,其绘示依据一些实施例的另一个容器。
10.图3a是一例示性透视图,其绘示依据一些实施例的又另一个容器。
11.图3b是一依据一些实施例的容槽的例示性透视图。
12.图4是一例示性透视图,其绘示依据一些实施例的复合叉状装置。
13.图5是一依据一些实施例的复合叉状装置的片段透视前视图。
14.图6是一依据一些实施例的复合叉状装置的俯视图。
15.图7是一例示性透视图,其绘示通过依据一些实施例的复合叉状装置支持的图1b所示的容器。
16.图8a是一例示性透视图,其绘示通过依据一些实施例的复合叉状装置支持的图2所示的容器。
17.图8b是一例示性透视图,其绘示通过依据一些实施例的复合叉状装置支持的图3a所示的容器。
18.图9是一片段透视俯视图,其绘示通过依据一些实施例的复合叉状装置的第一叉指来支持的顶部凸缘。
19.图10是一例示性透视侧视图,其绘示依据一些实施例的复合叉状装置的第二叉指。
20.图11是一图7的例示性俯视图。
21.图12是一例示性俯视图,其绘示通过依据一些实施例的复合叉状装置支持的顶部凸缘。
22.图13绘示一依据一些实施例的复合叉状装置的上部导引块体之一者的例示性透视图。
23.图14绘示一依据一些实施例的复合叉状装置的下部导引块体之一者的例示性透视图。
24.图15是一透视视图,其绘示被用于运输依据一些实施例的图1b所示的容器的系统中的复合叉状装置。
25.图16是一流程图,其绘示用于依据一些实施例的图15所示的系统的运输方法。
26.图17是一透视视图,其绘示被用于运输依据一些实施例的图2所示的容器的系统中的复合叉状装置。
27.图18是一流程图,其绘示用于依据一些实施例的图17所示的系统的运输方法。
28.实施方式
29.以下揭示内容提供许多不同实施例或范例,用于实现本揭示内容的不同特征。为了精简本揭示内容,以下将描述各个组件及配置的具体范例。当然,此等仅为范例而非意欲要做限制用途。举例来说,在以下描述中,一第一特征件形成于一第二特征件上方或之上,即表示其可能包括该第一特征件与该第二特征件是直接接触的实施例,亦可能包括有额外特征件形成于该第一特征件与该第二特征件之间而使得该第一特征件与第二特征件可未直接接触的实施例。此外,本揭示内容可能会在各种范例中重复参考编号及/或字母。此重复是为求简单明确,并非是其本身代表所讨论的各种实施例及/或配置之间的关系。
30.此外,在此可使用空间相对用语,诸如「在...之上」、「在....的上方」、「在....上方」、「在...之下」、「上部」、「下部」、「顶部」、「底部」、「前」、「后」、「向外地」、「向前地」、「向后地」、「内部」、「外部」等,以便于描述图式中绘示的一个组件或特征件与另一个(些)组件或特征件之间的关系。除在图式中所描绘之方位外,空间相对用语意欲囊括装置在使用或操作中之不同方位。该设备可能以其他方式被定向(旋转90度或其他方位),而在本文中所使用的空间相对用语可同样地被相应地来解读。
31.在半导体制程中,传载至少一个半导体装置(诸如芯片或裸片)的容器是通过手动或更通常是通过各种自动承载装置或自动物料搬运系统(amhs)被运输至各种处理部分及自各种处理部分被运输,以确保效率及安全性。自动物料搬运系统可为(但不限于)包括轨道导引车(rgv)、架空搬运梭(ohs)、架空起重搬运(oht)、自动导引车(agv)、人员导引车(pgv)或轨道及载具或是其他适合的装置之至少一者的系统。承载装置可为但不限于被编程而用于运输程序的可移动机器人,或机器手臂。
32.图1a是一例示性透视图,其绘示依据一些实施例的容器61。容器61主要用于(但不限于)传载至少一个完成的半导体制品,诸如动态存取存储器(dram)或其他适合的制品,且通常被称为托盘。图1b绘示依据一些实施例的容器(其为图1a所示的容器61之堆叠,且亦也由参考编号61表示)。为了支持或运输图1a或1b所示的容器61,机器人(未图标)的二个支撑手臂可被利用以提起及支持容器61,从而允许机器人将容器61运输至预定位置。
33.图2是一例示性透视图,其绘示依据一些实施例的另一个容器62。容器62主要用于(但不限于)传载图1a或1b所示的容器61,且通常被称为托盘匣型容器。容器62可包括容器主体621及顶部凸缘601,容器主体621被构型为允许图1a或1b所示的容器61被容纳于其中,且顶部凸缘601被安装在容器主体621的顶部表面上。顶部凸缘601被构型为允许容器62被夹持且运输至例如(但不限于)amhs的架空起重搬运(oht)。为了支持或运输容器62,与夹持手(未图示)一起组配的机器人可被利用以抓住或夹持容器62的顶部凸缘,从而允许机器人将容器62运输至预定位置。
34.图3a是一例示性透视图,其绘示依据一些实施例的又另一个容器63。图3b是一依据一些实施例的容槽64的例示性透视图。容器63与图2所示的容器62不同在于容器63主要用于(但不限于)传载通常被称为舟皿的容槽64。容槽64经构型以用于在其上支持多个等待被进一步处理的半导体装置(未图标)。容器63可包括容器主体631及顶部凸缘601,顶部凸缘601形成于容器主体631的顶部表面上且其具有相似于容器62的顶部凸缘601的构型,但可具有与容器62的顶部凸缘601厚度不同的厚度。容器主体631可在其两个相对内部壁具有多个导引槽632,从而导引容槽64插入至容器主体631及从容器主体631移除,且因此避免容器主体631内侧的容槽64互相接触。容器63通常被称为仓匣(magazine)型容器。为了支持或运输容器63,与两个导引轨道(未图示)一起组配的机器人可被利用以允许容器63的顶部凸缘601的两相对侧滑动至并被支持在导引轨道之间,从而允许机器人将容器63运输至预定位置。
35.因此,为了支持或运输不同类型的容器(诸如容器61、容器62、容器63),利用具有对应界面的承载装置,其不仅复杂化半导体制程,更会带来额外成本(诸如维护成本),且可能会不利地影响半导体制程的效率。
36.为了改善集成电路(ic)制程的效率,本揭示内容提供一种复合叉状装置,当其在
支持或运输不同类型的前述容器时,不需要改变其界面。
37.图4绘示依据一些实施例的复合叉状装置10的例示性透视图。图5是一依据一些实施例的复合叉状装置10的片段透视前视图。图6是一依据一些实施例的复合叉状装置10的俯视图。
38.复合叉状装置10包括第一叉指11及与第一叉指11分隔开的第二叉指12。复合叉状装置10可被应用于(但不限于)机器人50(显示于图15及图17),诸如6轴机器人、可移动机器人等。其他适合用于在其上应用复合叉状装置10的机械或机器人是在本揭示内容的预期范畴内。第一叉指11及第二叉指12之每一者可朝远离复合叉状装置10所连接的机械或机器人的方向延伸。在一些其他实施例中,第一叉指11及第二叉指12可彼此分隔开一固定的距离,且可互相平行地延伸。在某些实施例中,第一叉指11及第二叉指12可彼此隔开一范围落在约90mm至约140mm之距离。在一些实施例中,第一叉指11及第二叉指12可由金属(诸如铝等)制成。在某些实施例中,该金属可进行阳极处理以增加第一叉指11及第二叉指12的耐久性。其他适合用于第一叉指11及第二叉指12的材料是在本揭示内容的预期范畴内。第一叉指11及第二叉指12之每一者具有上部表面13及相对于上部表面13呈凹陷的下部表面14。
39.图7是一例示性透视图,其绘示通过依据一些实施例的复合叉状装置10支持的图1b所示的容器61。图8a是一例示性透视图,其绘示通过依据一些实施例的复合叉状装置10支持的容器62。图8b是一例示性透视图,其绘示通过依据一些实施例的复合叉状装置10支持的容器63。第一叉指11及第二叉指12的上部表面13被构型为协作地支持第一类型容器(例如,图1a、图1b及图7所示的容器61,或不具顶部凸缘的其他适合的容器)。第一叉指11及第二叉指12的下部表面14被构型为协作地支持第二类型容器(例如,图2及图8a所示的容器62、图3a及图8b所示的容器63或具有顶部凸缘601的其他适合的容器)。第二类型容器62、63具有与第一类型容器61的构型不同的构型。在一些实施例中,第一叉指11及第二叉指12可相对于第一叉指11及第二叉指12之间的中心线(cl,显示于图5)互相对称。
40.图9是一片段透视俯视图,其绘示通过依据一些实施例的第一叉指11支持顶部凸缘601。图10是一例示性透视侧视图,其绘示依据一些实施例的第二叉指12。在一些实施例中,第一叉指11及第二叉指12之每一者的上部表面13及下部表面14之间的高度差(h)可落在约1mm至约5cm的范围,使得第二类型容器62、63的顶部凸缘601可被支持在下部表面14上且位在上部表面13(所示如图8a、图8b及图9)之下。在某些实施例中,高度差(h)大于顶部凸缘601的厚度。在一些实施例中,第一叉指11及第二叉指12之每一者的长度(l)可实质上与第一类型容器61的长度相同。在替代性实施例中,只要第一类型容器61可通过第一叉指11及第二叉指12的上部表面13来支持,长度(l)可小于或大于第一类型容器61的长度。在一些实施例中,考虑到作用于例如图15及图17所示的机器人50上的转矩(其会影响复合叉状装置10于支持及运输容器的稳定性),第一叉指11及第二叉指12之每一者的长度(l)不大于第一类型容器61的长度的约110%。下部表面14与在上部表面13及下部表面14之间连接的侧壁15形成凹陷区域16。在一些实施例中,凹陷区域16的长度(l1)大于顶部凸缘601的长度(参见图9及图10)。在一些实施例中,凹陷区域16的长度(l1)为第一叉指11及第二叉指12之每一者的长度(l)的约40%至约60%,使得第二类型容器62、63的顶部凸缘601可被支持在凹陷区域16中。在一些实施例中,下部表面14可被凹入以减少复合叉状装置10的重量。
41.图11是一例示性俯视图,其绘示通过依据一些实施例的复合叉状装置10支持的第
一类型容器61。如图5、图6、图10及图11所示,在一些实施例中,第一叉指11及第二叉指12之每一者的上部表面13包括前支撑区域131及位在前支撑区域131后方的后支撑区域132。在一些实施例中,前支撑区域131位在下部表面14(亦即,凹陷区域16)前方,且后支撑区域132位在下部表面14(亦即,凹陷区域16)后方,从而允许第一类型容器61的四个部分分别被第一叉指11及第二叉指12的上部表面13的前支撑区域131及后支撑区域132支持。第一类型容器61的四个部分可为(但不限于)第一类型容器61的四个边缘部分。在一些实施例中,第一叉指11及第二叉指12之每一者的上部表面13具有位在前支撑区域131之外的前安装区域133,及位在后支撑区域132之外的后安装区域134。在某些实施例中,加强件29(显示于图9及图10)可被安装成部分地覆盖第一叉指11及第二叉指12的上部表面13之前安装区域133及后安装区域134之至少一者,从而机械性强化第一叉指11及/或第二叉指12。
42.在一些实施例中,如图5及图10所示,两个上部导引单元21分别形成在第一叉指11及第二叉指12的上部表面13上,以导引第一类型容器61的两侧,从而允许第一类型容器61的四个部分被分别地移动至第一叉指11及第二叉指12的上部表面13的前支撑区域131及后支撑区域132上。在一些实施例中,如图5所示,分别设置于第一叉指11及第二叉指12上的上部导引单元21可相对于中心线(cl)互相对称。在一些实施例中,上部导引单元21之每一者包括至少两个上部导引块体211,其被分别设置在第一叉指11及第二叉指12的相应者的前安装区域133及后安装区域134上。在替代性实施例中,上部导引单元21之每一者可包括多于两个上部导引块体211。
43.在一些实施例中,如图5及图11所示,本揭示内容的复合叉状装置10可进一步包括至少两个传感器23。传感器23用于检验及确保将第一类型容器61置放于复合叉状装置10上。通过设置在复合叉状装置10上的传感器23,当第一类型容器61被复合叉状装置10支持时,可避免被倾斜或错误地定位。在一些实施例中,传感器23之一者被设置在上部导引单元21之一者的上部导引块体211前方,且传感器23之另一者被设置在上部导引单元21之另一者的上部导引块体211后方。在一些实施例中,传感器23可被置于(但不限于)形成在第一叉指11及第二叉指12中的凹部130(参见图10及图11),从而避免传感器23与第一类型容器61接触。在替代性实施例中,两个传感器23被设置在第一叉指11及第二叉指12之每一者上,而被分别位在上部导引单元21之相应者的上部导引块体211前方及后方。传感器23之每一者可独立地为压力传感器、近接传感器、红外线传感器、光传感器、超声波传感器、纤维传感器等或其组合。其他适合的传感器是在本揭示内容的预期范畴内。
44.在一些实施例中,传感器23为光传感器或红外线传感器,且会发射波以感测物体(亦即容器)是否在预定位置/距离内。传感器23可包括塑料材料。在一些实施例中,传感器23被设定成当容器61在距离传感器23之每一者约1mm时,触发一用于复合叉状装置10的响应以进行操作。
45.图12是一例示性俯视图,其绘示通过依据一些实施例的复合叉状装置10支持的顶部凸缘601。
46.如图5及图12所示,在一些实施例中,第一叉指11及第二叉指12之每一者的下部表面14具有内部支撑区域141及位在内部支撑区域141之外的外部安装区域142。第一叉指11及第二叉指12之内部支撑区域141被定位以协作地支持第二类型容器62、63之顶部凸缘601。在一些实施例中,两个下部导引单元22分别形成在第一叉指11及第二叉指12的外部安
装区域142上,从而导引第二类型容器62、63之顶部凸缘601之两侧(亦参见图8a及图8b)以分别移动至第一叉指11及第二叉指12之内部支撑区域141上。在一些实施例中,如图5所示,被分别设置在第一叉指11及第二叉指12上的下部导引单元22可相对于中心线(cl)互相对称。在一些实施例中,下部导引单元22之每一者包括至少两个下部导引块体221,下部导引块体221彼此分隔开且被设置在第一叉指11及第二叉指12的相应者的外部安装区域142上。在替代性实施例中,下部导引单元22之每一者可包括多于两个下部导引块体221。在一些实施例中,下部导引块体221及第一叉指11及第二叉指12的相应者为整体形成的。在替代性实施例中,下部导引块体221可被部分地且分别地插入至第一叉指11及第二叉指12的相应者的下部表面14的凹部(未图示)中。在一些实施例中,如图9及图10所示,下部导引块体221之每一者被设置成与第一叉指11及第二叉指12的相应者上的凹陷区域16的长度(l1)的中点偏移,或被设置避免与顶部凸缘601的对应侧的中点契合。
47.图13绘示一依据一些实施例的上部导引块体211的一者的例示性透视图。图14绘示一依据一些实施例的下部导引块体221的一者的例示性透视图。
48.如图5、图6及图13所示,在一些实施例中,两个上部导引块体211之每一者具有第一顶部表面212、底部表面215及上部导引表面213。上部导引单元21之一者的上部导引块体211的上部导引表面213被设置成面对上部导引单元21之另一者的上部导引块体211的上部导引表面213。上部导引表面213可自第一顶部表面212倾斜地且向下地延伸。在一些实施例中,上部导引块体211之每一者的底部表面215的至少约三分之二与第一叉指11及第二叉指12的相应者的上部表面13接触。在一些实施例中,第一顶部表面212与上部导引表面213之间的夹角(θ1)可落在约90
°
至约135
°
的范围。在一些实施例中,上部导引表面213与第一叉指11及第二叉指12之对应一者的上部表面13之间的夹角(θ2)可不小于约45
°
且小于约90
°
。通过将夹角(θ2)配置在前述范围中(及选择性地将夹角(θ1)配置在前述范围中),第一类型容器61可被上部导引块体211平滑地导引。当夹角(θ2)小于约45
°
时,第一类型容器61可能无法被上部导引块体211导引而移动至前支撑区域131及后支撑区域132上。当夹角(θ2)不小于约90
°
时,第一类型容器61可能无法被上部导引块体211导引,且可能会直接掉落至前支撑区域131及后支撑区域132,其会使容纳于第一类型容器61之中的制品(例如,半导体装置)损坏。在一些实施例中,上部导引块体211之每一者进一步具有上部平坦表面214,其自上部导引表面213向下地延伸至第一叉指11及第二叉指12之对应一者的上部表面13,使得上部平坦表面214被配置成实质上垂直于第一叉指11及第二叉指12之对应一者的上部表面13。上部平坦表面214被构型成使得,当第一类型容器61被支持时,第一类型容器61不会倾斜且被均衡地安置在第一叉指11及第二叉指12的上部表面13的前支撑区域131及后支撑区域132上。在一些实施例中,上部导引块体211之每一者在垂直于相应的上部表面13的方向上具有块体高度(h
gu
)及平坦表面尺寸(d
fu
)(亦即,上部平坦表面214在垂直于相应的上部表面13的方向上的尺寸)。平坦表面尺寸(d
fu
)不小于约1mm且不大于块体高度(h
gu
)的大约一半。在一些实施例中,上部导引块体211可由金属(诸如铝等)制成。金属可进行阳极处理以增加耐久性。其他适合用于上部导引块体211的材料是在本揭示内容的预期范畴内。
49.如图5及图14所示,下部导引块体221之每一者具有第二顶部表面222及下部导引表面223。下部导引单元22之一者的下部导引块体221的下部导引表面223被设置成面对下部导引单元22之另一者的下部导引块体221的下部导引表面223。下部导引表面223可自第
二顶部表面222倾斜地且向下地延伸。在一些实施例中,第二顶部表面222与下部导引表面223之间的夹角(θ3)可落在约90
°
至约135
°
的范围内,且可相同于或不同于图13所示的上部导引块体211之每一者的夹角(θ1)。在一些实施例中,下部导引表面223与第一叉指11及第二叉指12之对应一者的下部表面14之间的夹角(θ4)可不小于约45
°
且小于约90
°
,且可相同于或不同于图13所示的上部导引块体211之每一者的夹角(θ2)。通过将夹角(θ4)配置在前述范围中(及选择性地将夹角(θ3)配置在前述范围中),第二类型容器62、63可被下部导引块体221平滑地导引。当夹角(θ4)小于约45
°
时,第二类型容器62、63可能不会被下部导引块体221导引以移动至第一叉指11及第二叉指12的内部支撑区域141上。当夹角(θ4)不小于约90
°
时,第一类型容器62、63可能不会被下部导引块体221导引,且可能会直接掉落至内部支撑区域141,其会使容纳于第二类型容器62、63之中的制品(例如,半导体装置)损坏。在一些实施例中,下部导引块体221之每一者进一步具有下部平坦表面224,其自下部导引表面223向下地延伸至第一叉指11及第二叉指12之对应一者的下部表面14,使得下部平坦表面224被配置成实质上垂直于第一叉指11及第二叉指12之对应一者的下部表面14。下部平坦表面224被构型成使得,当第二类型容器62、63被支持时,第二类型容器62、63的顶部凸缘601不会被倾斜且会被均衡地安置在下部表面14的内部支撑区域141上。在一些实施例中,下部导引块体221之每一者在垂直于相应的下部表面14的方向上具有块体高度(h
gl
)以及平坦表面尺寸(d
fl
)(亦即,下部平坦表面224在垂直于相应的下部表面14的方向上的尺寸)。块体高度(h
gl
)不大于第一叉指11及第二叉指12之每一者的上部表面13及下部表面14之间的高度差(h),以避免下部导引块体221与第一类型容器61(亦参见图7及10)接触。平坦表面尺寸(d
fl
)不小于约1mm且不大于块体高度(h
gl
)的大约一半。在一些实施例中,下部导引块体221可由金属(诸如铝等)制成。金属可进行阳极处理以增加耐久性。其他适合用于下部导引块体221的材料是在本揭示内容的预期范畴内。
50.在一些实施例中,传感器(未图示)可被提供以侦测顶部凸缘601是否被均衡地安置在下部表面14的内部支撑区域141。传感器之每一者可独立地为压力传感器、近接传感器、红外线传感器、光传感器、超声波传感器、纤维传感器等,或其组合。其他适合的传感器是在本揭示内容的预期范畴内。
51.如图13及图14所示,在一些实施例中,上部导引块体211及下部导引块体221之每一者的厚度(tg)可落在约5mm至约15mm的范围内,且上部导引块体211之每一者的厚度(tg)可相同于或不同于下部导引块体221之每一者的厚度(tg)。在一些实施例中,上部导引块体211之每一者的宽度(w
gu
)可落在约15mm至约30mm的范围内。在一些实施例中,下部导引块体221之每一者的宽度(w
gl
)并不大于上部导引块体211之每一者的宽度(w
gu
)。在一些其他实施例中,下部导引块体221之每一者的宽度(w
gl
)可为上部导引块体211之每一者的宽度(w
gu
)之约30%至约70%。
52.如图5、图10及图12所示,在一些实施例中,两个定位单元24被分别安装在第一叉指11及第二叉指12的下部表面14上。两个定位单元24被构型为当顶部凸缘601被第一叉指11及第二叉指12的下部表面14支持时定位顶部凸缘601。在一些实施例中,定位单元24之每一者包括两个主要定位销241,其一者位在下部导引单元22的两侧的相应者的下部导引块体221前方,且其另一者位在下部导引单元22的相应者的下部导引块体221后方,使得在顶部凸缘601的两侧分别地移动至第一叉指11及第二叉指12之内部支撑区域141时,顶部凸缘
601的两侧之每一者可分别位在定位单元24的相应者的两个主要定位销241之间。定位单元24的主要定位销241可分别位在顶部凸缘601的四个边缘之外,从而定位顶部凸缘601。在一些实施例中,顶部凸缘601的四个边缘为倾斜边缘。当顶部凸缘601被支持在第一叉指11及第二叉指12之间时,主要定位销241可分别被带入与倾斜边缘抵接契合。主要定位销241可为圆柱形,但不限于此。主要定位销241可由金属(诸如铝等)制成。金属可进行阳极处理以增加主要定位销241的耐久性。其他适合用于主要定位销241的材料及/或构型是在本揭示内容的预期范畴内。
53.在一些实施例中,定位单元24之每一者可进一步包括辅助定位销242,其位在两个主要定位销241之间以及在下部导引单元22的相应者的下部导引块体221之间,且其被构型为在顶部凸缘601的两侧分别地移动至第一叉指11及第二叉指12的内部支撑区域141上时,与顶部凸缘601的两侧的相应者契合。辅助定位销242可为圆柱形,但不限于此。辅助定位销242可由金属(诸如铝等)制成。金属可进行阳极处理以增加辅助定位销242的耐久性。其他适合用于辅助定位销242的材料及/或构型是在本揭示内容的预期范畴内。在一些实施例中,辅助定位销242具有小于主要定位销241的尺寸之尺寸。在一些实施例中,主要定位销241及辅助定位销242之每一者相较于下部表面14的高度不大于顶部凸缘601的厚度,使得主要定位销241及辅助定位销242之每一者可避免与图7所示的第一类型容器61接触。
54.在一些实施例中,如图5所示,上部表面13及下部表面14协作地组配以使得顶部凸缘601的重心(g2,参见图12)在z方向上沿着一轴线与第一类型容器61的重心(g1,参见图11)重合。z方向垂直于第一叉指11及第二叉指12之每一者的上部表面13及下部表面14两者而延伸。
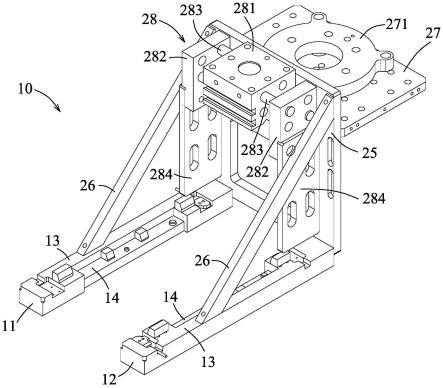
55.在一些实施例中,如图4及图5所示,复合叉状装置10可进一步包括后框架25。第一叉指11及第二叉指12之每一者的后端被安装至后框架25。在一些实施例中,第一叉指11及第二叉指12之每一者的后端可经由螺钉(未图示)被安装至后框架25的下部部分。其他适合的工具及/或方法可被使用于将第一叉指11及第二叉指12安装至后框架25。在某些实施例中,后框架25可被穿孔及/或凹入以减少复合叉状装置10的重量。在一些实施例中,两个连结件26可被进一步包括在复合叉状装置10之中。两个连结件26经构型以稳定复合叉状装置10的结构。两个连结件26之每一者将后框架25的上部部分与第一叉指11及第二叉指12的相应者互相连接,从而与后框架25与第一叉指11及第二叉指12的相应者形成三角形结构。将连结件26紧固至第一叉指11及第二叉指12以及后框架25可使用例如螺钉(未图示)来执行。其他适合的工具及/或方法可被使用于紧固。在一些实施例中,复合叉状装置10可进一步包括被安装在后框架25后侧的安装件27。安装件27可被构型为允许机器人50(显示于图15及图17)被耦合至复合叉状装置10。安装件27可包括设置于其上的凸缘271,其经构型以附接机器人50。在一些实施例中,安装件27可被穿孔及/或凹入以减少其重量。
56.如图4、图5及图7所示,在一些实施例中,复合叉状装置10可进一步包括辅助支持单元28,其被构型为确保第一类型容器61被正确且稳定地支持在第一叉指11及第二叉指12上。辅助支持单元28可包括流体致动缸281、两个致动板282、设置在流体致动缸281以及致动板282之每一者之间的多个致动杆283,及被分别连接至致动板282的两个侧框架284。在一些实施例中,流体致动缸281可经由例如(但不限于)螺钉(未图示)被紧固至后框架25的上部部分。其他适合的方法及/或工具可被用于紧固流体致动缸281。在一些实施例中,侧框
架284之每一者可位在第一叉指11及第二叉指12的相应者的凹陷区域16后方(亦参见图10)。在某些实施例中,侧框架284之每一者位在上部导引单元21之相应者的上方。流体致动缸281可为双动气压缸(double-acting pneumatic cylinder)、双冲程气压缸(double stroke pneumatic cylinder)等。其他适合用于作为流体致动缸281的装置是在本揭示内容的预期范畴内。在一些实施例中,当第一类型容器61被良好地支持以允许传感器23传输信号至辅助支持单元28时,会触发流体致动缸281以减少流体致动缸281与致动板282之每一者之间的距离。因此,侧框架284会朝向彼此移动,以将第一类型容器61的后部分支持在其间。在一些实施例中,侧框架284之每一者可被穿孔及/或凹入以减少复合叉状装置10的重量。
57.在替代性实施例中,额外特征件可被加入至复合叉状装置10。在另外的替代性实施例中,在不违背本揭示内容的精神及范畴的情况下,复合叉状装置10中的一些特征件可被修改、替换或剔除。
58.图15是一依据一些实施例的用于集成电路制程的系统的透视视图。该系统包括复合载入口工作台30、处理工具41、机器人50及复合叉状装置10。复合载入口工作台30被构型为允许负载第一类型容器61或第二类型容器62、63。机器人50位在复合载入口工作台30及处理工具41之间。复合叉状装置10被耦合以被机器人50驱动,且被构型为选择性地支持第一类型容器61或第二类型容器62、63,从而允许机器人50从复合载入口工作台30选择性地将第一类型容器61或第二类型容器62、63运输至处理工具41的入口载入口411。在一些实施例中,复合载入口工作台30可包括外部载入口位置311、312、313、314、315、316之至少一者及内部载入口位置301、302、303、304、305、306之至少一者,且复合载入口工作台30可被构型为从自动物料搬运系统(amhs)接收第二类型容器62、63或允许第二类型容器62、63移动回amhs。由于上文已叙述amhs之范例,故为简洁起见省略其细节。
59.在一些实施例中,处理工具41为加热工具,且接收自amhs第二类型容器为托盘匣型容器62(参见图2),其中容纳第一类型容器61。图16是一流程图,其绘示依据一些实施例的运输方法。当图1a或1b所示的第一类型容器61内部的半导体装置被运输以被处理工具41处理时,可使用图16所示的运输方法100。
60.参照图15及图16,运输方法100可包括步骤101至108。在步骤101中,将从amhs卸除的第二类型容器(例如但不限于图2所示的托盘匣型容器62)负载于外部载入口位置311、312、313、314、315、316之选定一者上。在步骤102中,使用致动装置(未图标)使自外部载入口位置311、312、313、314、315、316之选定一者上的第二类型容器62分离的第一类型容器61(例如但不限于图1a或1b所示的容器)移动至内部载入口位置301、302、303、304、305、306之对应一者。在步骤103中,致动机器人50以使用复合叉状装置10来支持第一类型容器61,直到第一类型容器61被复合叉状装置10良好地支持为止。在步骤104中,致动机器人50以将第一类型容器61运输至处理工具41,直到第一类型容器61底部部分被置于处理工具41的入口载入口411上为止。在步骤105中,使第一类型容器61脱离复合叉状装置。在步骤106中,在第一类型容器61中的半导体装置被处理预定的时间周期后,进一步致动机器人50以使用复合叉状装置10来使第一类型容器61移动回内部载入口位置301、302、303、304、305、306之对应一者。在步骤107中,使用致动装置使第一类型容器61进一步移动回外部载入口位置311、312、313、314、315、316之选定一者上的第二类型容器62。在步骤108中,将第二类型容器62
负载回amhs。
61.在替代性实施例中,在不违背本揭示内容的精神及范畴的情况下,运输方法100中的一些步骤可被修改、替换或剔除。在另外的替代性实施例中,额外步骤可被加入至运输方法100。
62.在一些实施例中,机器人50的致动可使用计算机装置(未图标)来控制。具体而言,当传感器(未图示)侦测到第一类型容器61被移动至内部载入口位置301、302、303、304、305、306之对应一者时,致动机器人50而允许第一类型容器61被复合叉状装置10支持。当传感器23(参见图5)侦测到第一类型容器61被良好地支持时,致动机器人50以将第一类型容器61运输至处理工具41。在预定的时间周期之后,进一步致动机器人50以使用复合叉状装置10来使第一类型容器61移动回内部载入口位置301、302、303、304、305、306之对应一者。计算机装置可为可编程逻辑控制器(plc),或其他适合的装置。
63.在一些实施例中,内部载入口位置301、302、303、304、305、306及外部载入口位置311、312、313、314、315、316皆在机器人50的工作包封(work envelope)中。在其他实施例中,外部载入口位置311、312、313、314、315、316可不在机器人50的工作包封中。在替代性实施例中,可从第二类型容器62手动移除第一类型容器61,且将第一类型容器61手动移动回第二类型容器62。机器人50可为关节型机器人。在一些实施例中,处理工具41可将第一类型容器61加热至范围落在约摄氏100℃至300℃的范围内的温度,或可落在约120℃至约180℃的范围内的温度,使得可处理容纳于第一类型容器61中的半导体装置。在一些实施例中,入口载入口411可为可移动启动平台(mobile launch platform)。
64.图17是一依据一些实施例的用于集成电路制程的系统的透视视图。除了在图17中,处理工具42是一非加热工具,且系统是用于运输第二类型容器62(参见图2)之外,该图17所示的系统是相似于图15所示的系统。在一些实施例中,图17所示的系统也可用于运输图3a所示的第二类型容器63。在一些实施例中,处理工具42可为例如(但不限于)检验工具,且可为其他适合的处理工具。在一些实施例中,处理工具42的入口载入口421可为可移动启动平台。
65.图18是一流程图,其绘示依据一些实施例的运输方法。当第二类型容器62、63(亦参见图2及图3a)中的半导体装置被运输以被处理工具42处理时,可使用图18所示的运输方法200。
66.参照图17及图18,运输方法200可包括步骤201至208。在步骤201中,将卸除自amhs的第二类型容器(例如但不限于图2所示的托盘匣型容器62、图3a所示的仓匣型容器63或具有顶部凸缘的任何其他容器)负载于外部载入口位置311、312、313、314、315、316之选定一者上。在步骤202中,使用致动装置(未图标)使外部载入口位置311、312、313、314、315、316之选定一者上的第二类型容器62、63移动至内部载入口位置301、302、303、304、305、306之对应一者上。在步骤203中,致动机器人50以使用复合叉状装置10来支持第二类型容器62、63,直到第二类型容器62、63被复合叉状装置10良好地支持为止。在步骤204中,致动机器人50来将第二类型容器62、63运输至处理工具42,直到第二类型容器62、63的底部部分被置于处理工具42的入口载入口421上为止。请注意的是,纵使图17所示的容器为容器62,但图3a所示的容器63或任何具有顶部凸缘的其他容器可被使用于方法200中。在步骤205中,使第二类型容器62、63脱离复合叉状装置。在步骤206中,在使用处理工具42处理及/或检测第二
类型容器62、63中的半导体装置之后,进一步致动机器人50以使用复合叉状装置10来使第二类型容器62、63移动回内部载入口位置301、302、303、304、305、306之对应一者。在步骤207中,使用致动装置使第二类型容器62、63进一步移动回外部载入口位置311、312、313、314、315、316之选定一者。在步骤208中,将第二类型容器62、63负载回amhs。
67.在替代性实施例中,在不违背本揭示内容的精神及范畴的情况下,运输方法200中的一些步骤可被修改、替换或剔除。在另外的替代性实施例中,额外步骤可被加入至运输方法200。
68.本揭示内容之复合叉状装置10可用于制造以下各种制品的制程,诸如但不限于info(整合式扇出)、cowos(基板上晶圆上芯片)、soic(系统整合芯片)、未来凸块/封装制品,或其他适合的制品。
69.本揭示内容的实施例具有以下有利的特征。通过在复合叉状装置的第一叉指及第二叉指之每一者上形成上部表面及下部表面,复合叉状装置可传载且递送多个不同容器,其可在半导体制程期间增加运输程序的效率,而不须利用对应至不同容器的各种承载装置。此外,通过将上部导引单元及下部导引单元、传感器及定位单元加入至复合叉状装置,可确保被支持在第一叉指及第二叉指之上的容器的定位是均衡及稳定的,从而避免容器倾斜,其可能会损坏被容纳于容器内部的制品或半导体装置。再者,通过在复合叉状装置中包括辅助支持单元,可进一步提升运输程序的稳定性。
70.依据本揭示内容之一些实施例,提供一种复合叉状装置,其包括一第一叉指及一与第一叉指分隔开的第二叉指。该第一叉指及该第二叉指之每一者具有一上部表面及一相较于上部表面呈凹陷的下部表面。该第一叉指及该第二叉指的上部表面被构型为协作地支持一第一类型容器。该第一叉指及该第二叉指的下部表面被构型为协作地支持一第二类型容器,该第二类型容器具有与该第一类型容器的构型不同的构型。
71.依据本揭示内容之一些实施例,该第一叉指及该第二叉指之每一者的该上部表面及该下部表面之间的一高度差落于1mm至5cm的范围内。
72.依据本揭示内容之一些实施例,该第一叉指及该第二叉指之每一者的该上部表面包括一位在该下部表面前方的前支撑区域及一位在该下部表面后方的后支撑区域,从而允许该第一类型容器的四个部分分别被该第一叉指及该第二叉指的该上部表面的该前支撑区域及该后支撑区域支持。
73.依据本揭示内容之一些实施例,该第一叉指及该第二叉指之每一者的该上部表面具有一位在该前支撑区域之外的前安装区域及一位在该后支撑区域之外的后安装区域。该第一叉指及该第二叉指之每一者的该下部表面具有一内部支撑区域及一位在该内部支撑区域之外的外部安装区域。该第一叉指及该第二叉指之该内部支撑区域被定位以协作地支持该第二类型容器之一顶部凸缘。
74.依据本揭示内容之一些实施例,该复合叉状装置进一步包括两个上部导引单元及两个下部导引单元。该两个上部导引单元分别形成在该第一叉指及该第二叉指的该上部表面上以导引该第一类型容器的两侧,从而允许该第一类型容器的该四个部分分别被移动至该第一叉指及该第二叉指的该上部表面的该前支撑区域及该后支撑区域上。该两个下部导引单元分别形成在该第一叉指及该第二叉指的该外部安装区域上,从而导引该第二类型容器的该顶部凸缘的两侧以分别移动至该第一叉指及该第二叉指的该内部支撑区域上。
75.依据本揭示内容之一些实施例,该第一叉指及该第二叉指互相对称。分别设置在该第一叉指及该第二叉指的该上部导引单元互相对称。分别设置在该第一叉指及该第二叉指上的该下部导引单元互相对称。
76.依据本揭示内容之一些实施例,该上部导引单元之每一者包括两个上部导引块体,其被分别设置在该第一叉指及该第二叉指的相应者的该前安装区域及该后安装区域上。该上部导引块体之每一者具有一上部导引表面。该上部导引单元之一者的该上部导引块体的该上部导引表面被设置成面对该上部导引单元之另一者的该上部导引块体的该上部导引表面。该下部导引单元之每一者包括两个下部导引块体,其彼此分隔开且被设置在该第一叉指及该第二叉指的相应者的该外部安装区域上。该下部导引块体之每一者具有一下部导引表面。该下部导引单元之一者的该下部导引块体的该下部导引表面被设置成面对该下部导引单元之另一者的该下部导引块体的该下部导引表面。
77.依据本揭示内容之一些实施例,在该上部导引表面与该第一叉指及该第二叉指之对应一者的该上部表面之间的夹角不小于45
°
且小于90
°
,且在该下部导引表面与该第一叉指及该第二叉指之对应一者的该下部表面之间的夹角不小于45
°
且小于90
°
。
78.依据本揭示内容之一些实施例,该上部导引块体之每一者进一步具有一上部平坦表面,其自该上部导引表面向下地延伸至该第一叉指及该第二叉指之对应一者的该上部表面,使得该上部平坦表面被配置成垂直于该第一叉指及该第二叉指之对应一者的该上部表面。该下部导引块体之每一者进一步具有一下部平坦表面,其自该下部导引表面向下地延伸至该第一叉指及该第二叉指之对应一者的该下部表面,使得该下部平坦表面被配置成垂直于该第一叉指及该第二叉指之对应一者的该下部表面。
79.依据本揭示内容之一些实施例,复合叉状装置进一步包括两个传感器。该两个传感器之一者被设置在该上部导引单元之一者的该上部导引块体前方,且该两个传感器之另一者被设置在该上部导引单元之另一者的该上部导引块体后方。
80.依据本揭示内容之一些实施例,该复合叉状装置进一步包括两个定位单元,其分别被安装在该第一叉指及该第二叉指的该下部表面,且其被构型为当该顶部凸缘在被该第一叉指及该第二叉指的该下部表面支持时定位该顶部凸缘。
81.依据本揭示内容之一些实施例,该定位单元之每一者包括两个主要定位销。该两个主要定位销之一者位在该下部导引单元的相应者的该下部导引块体前方,且该两个主要定位销之另一者位在该下部导引单元的相应者的该下部导引块体后方,使得在该顶部凸缘的两侧分别移动至该第一叉指及该第二叉指的该内部支撑区域时,该定位单元的该主要定位销分别位在该顶部凸缘的该四个边缘外,从而定位该顶部凸缘。
82.依据本揭示内容之一些实施例,该定位单元之每一者进一步包括一辅助定位销,其位在该下部导引单元的相应者的该下部导引块体之间,且其被构型为在该顶部凸缘的两侧分别地移动至该第一叉指及该第二叉指的该内部支撑区域上时,与该顶部凸缘的两侧的相应者契合。
83.依据本揭示内容之一些实施例,提供一种系统,其包括一复合载入口工作台、一处理工具、一机器人及一复合叉状装置。该复合载入口工作台被构型为允许负载一第一类型容器或一具有与该第一类型容器的构型不同的构型的第二类型容器。该机器人定位在该复合载入口工作台及该处理工具之间。该复合叉状装置经耦合而可被该机器人驱动,且被构
型为选择性地支持该第一类型容器或该第二类型容器,从而允许该机器人选择性地将该第一类型容器或该第二类型容器自该复合载入口工作台运输至该处理工具的一入口载入口。该复合叉状装置包括一第一叉指及一与第一叉指分隔开的第二叉指。该第一叉指及该第二叉指之每一者具有一上部表面及一相对于该上部表面呈凹陷的下部表面。该第一叉指及该第二叉指的该上部表面被构型为协作地支持该第一类型容器。该第一叉指及该第二叉指的该下部表面被构型为协作地支持该第二类型容器。
84.依据本揭示内容之一些实施例,该复合叉状装置进一步包括一后框架。该第一叉指及该第二叉指之每一者的后端被安装至该后框架的一下部部分。
85.依据本揭示内容之一些实施例,该复合叉状装置进一步包括两个连结件,其每一者将该后框架的一上部部分与该第一叉指及该第二叉指的相应者互相连接。
86.依据本揭示内容之一些实施例,该复合叉状装置进一步包括一被安装在该后框架的后侧的安装件,且其被构型为允许该机器人经由安装而被耦合至该复合叉状装置。
87.依据本揭示内容之一些实施例,提供一种方法,其包括:将一容器置于一复合载入口工作台;使用一复合叉状装置支持该容器,该复合叉状装置包括一第一叉指及一第二叉指,该第一叉指及该第二叉指之每一者具有一上部表面及一相对于该上部表面呈凹陷的下部表面,以使得该容器被该第一叉指及该第二叉指的该上部表面或该下部表面支持;使用该复合叉状装置将该容器运输至一处理工具,使得该容器的一底部部分被置于该处理工具的一入口载入口;及使该容器脱离该复合叉状装置。
88.依据本揭示内容之一些实施例,该容器的两侧被该第一叉指及该第二叉指的该上部表面支持。
89.依据本揭示内容之一些实施例,该容器的一顶部凸缘的两侧被该第一叉指及该第二叉指的该下部表面支持。
90.上文概述若干实施例之特征,使得本领域技术人员可更佳地理解本揭示内容的各个方面。本领域技术人员应可理解到,他们可轻易地以本揭示内容作为基础来设计或修改以用于执行与本文介绍的实施例具有相同目的及/或实现相同优点的其他制程或结构。本领域技术人员也应可理解到,此类等效的构造并无悖离本揭示内容的精神和范畴,且他们能在不违背本揭示内容的精神和范畴的情况下,做各式各样的修改、取代和替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1