一种大型水轮机在位机器人加工坐标系标定方法与流程
1.本发明涉及视觉标定领域,尤其涉及一种大型水轮机在位机器人加工坐标系标定方法。
背景技术:
2.全国已建或在建的大中型水电站有数百座,每个水电站有数台到数十台机组,我国平均每年有数十到数百台水轮机需要大修,大修的周期一般为几个月,每年由于停机维修而损失的发电量折合人民币高达几十亿元。目前常用的维修方法是对磨蚀缺陷进行清根—焊接—人工打磨进行修复。但因转轮较大,存在人工打磨强度高,修复精度难以控制,一致性差等额问题,甚至加剧了转轮的磨蚀速度,破坏转轮的平衡,降低机组发电效率。另外水轮机转轮室内部空间狭小,打磨操作带来的粉尘严重影响工人的健康,长期在这样的工作环境中很容易患上职业病。因此,研发具有较高的修复精度和操作方便的大型水轮机转轮在位机器人加工系统迫在眉睫,具有重要意义。
3.在位机器人加工精度和效率保障的关键技术之一是如何准确快速地建立机器人与视觉、机器人与工件的相对位置关系,即手眼标定和工件坐标系标定。传统双目结构光视觉的手眼标定一般采用棋盘法,精度较低,难以满足水轮机转轮加工精度的要求,需研发一种更高精度的手眼标定方法。此外,由于转轮模型缺失且转轮室内部环境复杂,大型水轮机转轮在位加工是典型的非结构化环境,无法基于三维设计模型直接构建工件坐标系。同时,大型水轮机转轮尺寸大、且为自由曲面,难以采用传统四点法或其他示教方法标定工件坐标系。因此,开发一种具有较高精度、操作便捷的机器人手眼标定与工件坐标系标定方法,是实现大型水轮机转轮在位机器人加工应用的必由之路。
技术实现要素:
4.本发明的目的是为了解决现有技术在大型水轮机转轮在位机器人加工应用中存在的以上技术缺陷和改进需求,提出一种大型水轮机在位机器人加工坐标系标定方法。
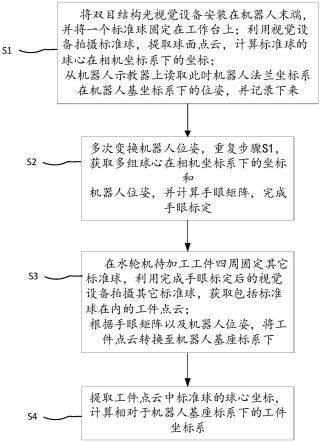
5.本技术提供的一种大型水轮机在位机器人加工坐标系标定方法,包括以下步骤:
6.s1、将双目结构光视觉设备安装在机器人末端,并将一个标准球固定在工作台上;利用视觉设备拍摄标准球,提取球面点云,计算标准球的球心在相机坐标系下的坐标;
7.从机器人示教器上读取此时机器人法兰坐标系在机器人基坐标系下的位姿,并记录下来;
8.s2、多次变换机器人位姿,重复步骤s1,获取多组球心在相机坐标系下的坐标和机器人位姿,并计算手眼矩阵,完成手眼标定;
9.s3、在水轮机待加工工件四周固定其它标准球,利用完成手眼标定后的视觉设备拍摄其它标准球,获取包括标准球在内的工件点云;
10.根据手眼矩阵以及机器人位姿,将工件点云转换至机器人基座标系下;
11.s4、提取工件点云中标准球的球心坐标,计算相对于机器人基座标系下的工件坐
标系。
12.进一步地,步骤s1具体如下:
13.s11、将视觉设备安装在机器人末端,连接线缆;在视觉设备可测量范围内,将一个标准球固定在工作台上;
14.s12、采用视觉设备拍摄标准球,获取球面点云数据;
15.s13:基于球面点云数据采用最小二乘法拟合球心坐标p,并记录;同时,在机器人示教器上直接读取此时机器人法兰坐标系在机器人基坐标系下的位姿并记录。
16.进一步地,步骤s2中手眼矩阵的求解,具体如下:
17.s21:变换机器人位姿n组,记录球面点云数据和机器人法兰坐标系在机器人基坐标系下的位姿;其中n》=4;
18.s22:球心p在机器人基坐标系下的坐标为pb=[xb,yb,zb,1],在双目结构光视觉相机坐标系下的坐标为pi=[xi,yi,zi,1](i=1,2,
…
n),其中i为相机拍摄次数;
[0019]
s23:机器人法兰坐标系在机器人基坐标系下的位姿矩阵为其中i为相机拍摄次数。可在每次拍摄时直接从机器人示教器中读取;
[0020]
s24:设需求解的手眼矩阵为根据坐标变换关系可知标准球位置固定,pb保持不变,建立方程,
[0021][0022]
根据式(1)采用最小二乘法求解手眼矩阵x。
[0023]
进一步地,步骤s3具体为:
[0024]
s31:根据大型水轮机转轮的尺寸,将其划分成若干长度不超过l米,宽度不超过h米的加工区域,在每个加工区域四周随机粘贴m个标准球;其中m大于4,且任意两球心间距不小于d米;其中l、h、m、d均为根据实际情况的预设值;
[0025]
s32:由视觉设备拍摄工件及标准球的点云数据是在相机坐标下pc,拍摄点云时机器人末端法兰相对于基坐标系的位姿为tr,根据步骤s24获取的手眼矩阵为x,进而计算机器人基坐标系下的点云数据为trxpc。
[0026]
s41、采用最小二乘法即可求得各标准球的球心在机器人基坐标系下的坐标,随机获取4个标准球,四个标准球球心坐标为c1=[x
c1
,y
c1
,z
c1
]、c2=[x
c2
,y
c2
,z
c2
]、c3=[x
c3
,y
c3
,z
c3
]、c4=[x
c4
,y
c4
,z
c4
];
[0027]
s42、以c1为工件坐标系原点,以c1c2连线为x轴,向量c1c2的方向为x轴正方向,得到x轴单位向量为
[0028]
s43、以c1c
2 c3三点构成的平面为工件坐标系的xoy平面,c4点在该平面上的投影点为以单位向量为z轴正方向;
[0029]
s44、根据右手法则,y轴的单位向量j=k
×
i.至此,完成工件坐标系建立和求解。
[0030]
与现有技术相比,本发明的有益效果包括:实现了大型水轮机转轮在位机器人的
视觉标定过程,便于机器人进行视觉定位,自动作业。
附图说明
[0031]
图1是本发明方法的流程图;
[0032]
图2是本发明具体实施例所采集的工件及提取出标准球的点云图;
[0033]
图3是本发明具体实施例所求解出来的工件坐标系的位姿矩阵。
具体实施方式
[0034]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0035]
请参考图1,图1是本发明方法的流程图;
[0036]
s1、将双目结构光视觉设备安装在机器人末端,并将一个标准球固定在工作台上;利用视觉设备拍摄标准球,提取球面点云,计算标准球的球心在相机坐标系下的坐标;
[0037]
从机器人示教器上读取此时机器人法兰坐标系在机器人基坐标系下的位姿,并记录下来;
[0038]
需要说明的是,步骤s1具体如下:
[0039]
s11、将视觉设备安装在机器人末端,连接线缆;在视觉设备可测量范围内,将一个标准球固定在工作台上;
[0040]
需要说明的是,在连接线缆完成后,确保视觉设备能够正常测量,且正常返回点云数据;在本发明实施例中,视觉设备采用双目结构光视觉设备。
[0041]
需要说明的是,标准球的直径可以根据双目结构光视觉设备的视野范围进行选择;
[0042]
作为一具体实施例,使用的视觉设备为惟景三维powerscan 2.3m,为结构蓝光非接触式相机,标准球的直径大小为25mm;
[0043]
s12、采用视觉设备拍摄标准球,获取球面点云数据;
[0044]
s13:基于球面点云数据采用最小二乘法拟合球心坐标p,并记录;同时,在机器人示教器上直接读取此时机器人法兰坐标系在机器人基坐标系下的位姿并记录。
[0045]
s2、多次变换机器人位姿,重复步骤s1,获取多组球心在相机坐标系下的坐标和机器人位姿,并计算手眼矩阵,完成手眼标定;
[0046]
需要说明的是,步骤s2中手眼矩阵的求解,具体如下:
[0047]
s21:变换机器人位姿n组,记录球面点云数据和机器人法兰坐标系在机器人基坐标系下的位姿;其中n》=4;
[0048]
需要说明的是,在变换机器人位姿时,位姿变换幅度需尽可能大,且需从多种角度进行变换,拍摄标准球,以此覆盖各种工况;
[0049]
s22:球心p在机器人基坐标系下的坐标为pb=[xb,yb,zb,1],在双目结构光视觉相机坐标系下的坐标为pi=[xi,yi,zi,1](i=1,2,
…
n),其中i为相机拍摄次数;
[0050]
s23:机器人法兰坐标系在机器人基坐标系下的位姿矩阵为其中i
为相机拍摄次数。可在每次拍摄时直接从机器人示教器中读取;
[0051]
s24:设需求解的手眼矩阵为根据坐标变换关系可知标准球位置固定,pb保持不变,建立方程,
[0052][0053]
根据式(1)采用最小二乘法求解手眼矩阵x。
[0054]
需要说明的是,利用式(1)求解手眼矩阵的具体过程如下:
[0055]
根据四元数定义,旋转矩阵r可以用四元数表示,则r中有四个未知变量,另外t中有三个未知变量,因此x中一共存在7个未知变量。根据式(1)可知,每两次拍摄可建立一个等式,每个等式可确定3个方程。因此,4次拍摄可确定三个等式共9个方程,采用最小二乘法即可优化求解x中的7个未知变量,从而得到手眼矩阵x。
[0056]
s3、在水轮机待加工工件四周固定其它标准球,利用完成手眼标定后的视觉设备拍摄其它标准球,获取包括标准球在内的工件点云;
[0057]
根据手眼矩阵以及机器人位姿,将工件点云转换至机器人基座标系下;
[0058]
需要说明的是,步骤s3具体为:
[0059]
s31:根据大型水轮机转轮的尺寸,将其划分成若干长度不超过l米,宽度不超过h米的加工区域,在每个加工区域四周随机粘贴m个标准球;其中m大于4,且任意两球心间距不小于d米;其中l、h、m、d均为根据实际情况的预设值;
[0060]
需要说明的是,在本发明实施例中,根据大型水轮机转轮的尺寸,将其划分成若干长度不超过1.5m,宽度不超过1m的加工区域,在每个加工区域四周随机粘贴若干标准球(不少于4个,任意两球球心间距不小于1m);
[0061]
s32:由视觉设备拍摄工件及标准球的点云数据是在相机坐标下pc,拍摄点云时机器人末端法兰相对于基坐标系的位姿为tr,根据步骤s24获取的手眼矩阵为x,进而计算机器人基坐标系下的点云数据为trxpc。
[0062]
作为一具体实施例,采集的工件及提取出标准球的点云图如下图2所示。
[0063]
s4、提取工件点云中标准球的球心坐标,计算相对于机器人基座标系下的工件坐标系。
[0064]
需要说明的是,步骤s4具体如下:
[0065]
s41、采用最小二乘法即可求得各标准球的球心在机器人基坐标系下的坐标,随机获取4个标准球,四个标准球球心坐标为c1=[x
c1
,y
c1
,z
c1
]、c2=[x
c2
,y
c2
,z
c2
]、c3=[x
c3
,y
c3
,z
c3
]、c4=[x
c4
,y
c4
,z
c4
];
[0066]
s42、以c1为工件坐标系原点,以c1c2连线为x轴,向量c1c2的方向为x轴正方向,得到x轴单位向量为
[0067]
s43、以c1c
2 c3三点构成的平面为工件坐标系的xoy平面,c4点在该平面上的投影点为以单位向量为z轴正方向;
[0068]
s44、根据右手法则,y轴的单位向量j=k
×
i.至此,完成工件坐标系建立和求解。
[0069]
作为一种实施例,求解出来的工件坐标系的位姿矩阵如图3所示。
[0070]
本发明的有益效果是:实现了大型水轮机转轮在位机器人的视觉标定过程,便于机器人进行视觉定位,自动作业。
[0071]
应理解,上述实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术实施例的实施过程构成任何限定。
[0072]
以上本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1